توضیحات
پروژه کمک آموزشی کنترل چندمتغیره با مدل مقاله کنترل غیر خطی و چند متغیره قسمت تقطیر از قسمت تولید متانول
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده است.
دارای گزارش 49 صفحه ای در قالب ورد است.
پروژه مربوط به کنترل چند متغیره است و موارد زیر در آن تحقق یافته است:
- مدل تحليلي مرتبه کاهش يافته کاهش
- مشخصات سيستم حلقه باز
- بررسی کنترل پذیری و رویت پذیری
- به دست آوردن تابع تبدیل و پاسخ پله سیستم
- به دست آوردن صفر و قطب های سیستم
- تبدیل به فرم بلوک جردن
- تبدیل به فرم کنترل پذیری و رویت پذیری
- بررسی پایداری لیاپانوف
- کنترلر آرايه نايکوئيست مستقيم DNA
- کنترلر LQG Linear Quadratic Gaussian با استفاده از فرم اسمیت مک میلان
- طراحي LQG/LTR
- بازيابي انتقال حلقه
- طراحي جبرانساز LQG/LTR
- طراحي فيلتر کالمن
- کنترلرهاي مقاله Perefect Control & Tuning regulator یا bibo
- طراحي رگولاتور بهينه و بازيابي حلقه
- بستن حلقه فيدبک
- مقایسه کنترلر ها
بخشی از گزارش:
براي شبيه سازي سيستم به همراه کنترل از نرم افزار مطلب نسخه 7 استفاده شده است. معرفي سيستم و طراحي کنترلر با استفاده از M-file انجام گرفته است[1]. براي نمايش پاسخ خروجي و سيگنالهاي کنترلي از قسمت شبيهسازي[2] نرمافزار استفاده شده است، اين امر به اين خاطر است که دسترسي به سيگنالهاي کنترلي در محيط M-file دشوار است. مراحل پياده شده در M-fileبا توجه مطالب توضيحي داده شده در آن آشکار است،ولي براي تکميل بحث ميتوان اين مراحل رابه صورت خلاصه به صورت زير بيان کرد.
- تعريف ماتريس تابع تبديل سيستم بدست آمده در بخش قبل
- تبديل اين سيستم از فضاي حالت به تابع تبديل فراکانسي در يک محدوده خاص و رسم نوارهاي گرشگورين. با اجراي اين مرحله مشاهده ميشود که چون نوارهاي گرشگورين نقطه 1- را شامل نميشوند، در نتيجه ماتريس تابع تبديل سيستم غلبه قطري است. اما همانطور که در نمودارها مشخص است پهناي اين نوارها عريض است.
- رسم پاسخ پله سيستم. مشاهده ميشود که در حالت ماندگار تداخلي در خروجيهاي غير متناظر وجود دارد.
- با طراحي ماتريس ثابت اين تداخل از بين ميرود. همچنين باندهاي گرشگورين بسيار نازک تر از حالت ابتدايي ميشود و اين مورد ميتواند به صورت يک بهبود در سيستم مورد نظر قرار گيرد. در قسمت روش پرن-فروبنيوس به سيستم بدست آمده اعمال شد، که نتايج خوبي بدست نيامد و حتي باندهاي گرشگورين پهن تر شدند و سيستم به سمتي رفت که از حالت غلبه قطري درآيد. به همين دليل و اينکه نيازي به اين قسمت نبود از جبران کننده صرفنظر شد.
- طراحي کنترلر قطري ، که عناصر روي قطر آن با استفاده از ابزار rltool براي عناصر روي قطر ماتريس سيستم جبران شده با کنترلر PI طراحي شد.
- رسم پاسخ پله سيستم.
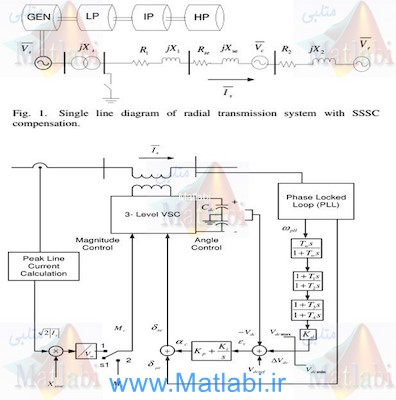
بعد از اين مراحل به اين دليل که در M-file به سيگنالهاي کنترلي ورودي به سيستم دسترسي نداشتيم از محيط شبيه سازي براي رفع اين مشکل استفاده کرديم شکل 2-1 ساختار سيستم به همراه کنترلر طراحي شده در محيط شبيهسازي را نشان ميدهد.
[1] DNA.m
[2] Simulink
نتايج بدست آمده را به صورت خلاصه ميتوان به صورت زير بيان کرد:
- )حذف interaction بین کانال ها
- 2) بهبود کیفیت پاسخ در سه کانال
- الف) بهبود پاسخ های گذرا
- ب) حذف خطای ماندگار
| کنترلر | زمان نشست | سيگنال کنترلي | احتياج مدل سيستم |
| INA | مناسب | معقول | بله |
| LQG | خوب | تغيرات و دامنه زياد | بله |
| Prefect Control | مناسب | معقول | خيلي زياد |
| Tuning Regulator | خيلي زياد | معقول | کم |
در بالا فقط بخش های جزیی از گزارش را جهت آشنایی قبل از خرید ارائه نمودیم.
کلیدواژه:
Matlab , برج تقطير, اتانول, چندمتغيره , كنترل GMC , پروژه متلب, پروژه matlab , شبیه سازی با متلب
پروژه آموزشی کنترل چندمتغیره با مدل مقاله کنترل غیر خطی و چند متغیره قسمت تقطیر از قسمت تولید متانول
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.