توضیحات
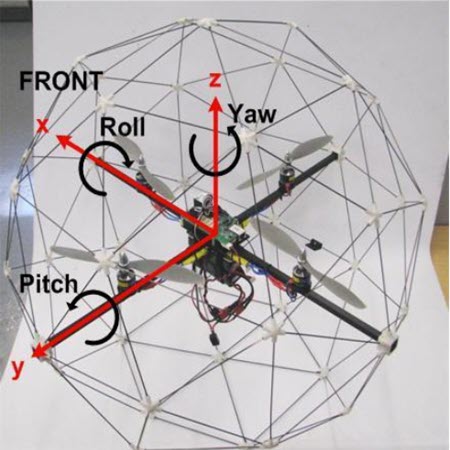
کنترل تحمل پذیر خطا/خسارت یک وسیله نقلیه هوایی بدون سرنشین هلیکوپتر کوادروتور با استفاده از کنترل تطبیقی مدل مرجع و PID زمانبندی شده
عنوان مقاله:
Fault/Damage Tolerant Control of a Quadrotor Helicopter UAV using Model Reference Adaptive Control and Gain Scheduled PID
شبیه سازی در محیط ام فایل متلب انجام شده است.
گزارش ندارد. درون ام فایها کامنت گذاری برای هر بخش انجام شده است.
فایلهای شبیه سازی به تفکیک در 6 پوشه با نام های زیر قرار گرفته اند:
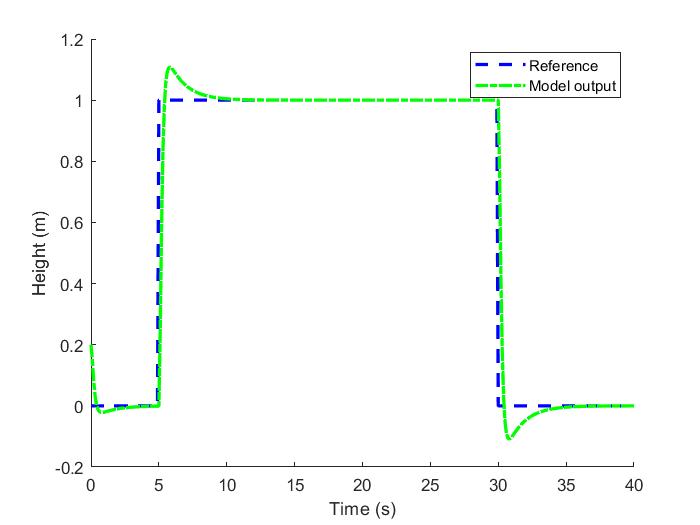
نتایج مربوط به MRAC – Height
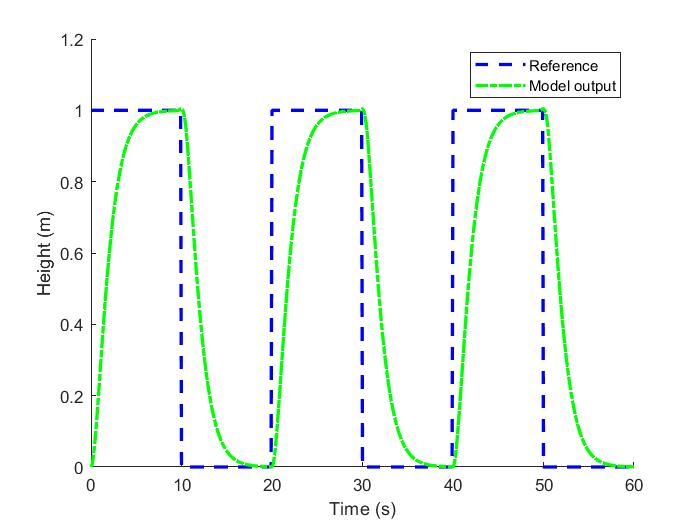
MRAC response
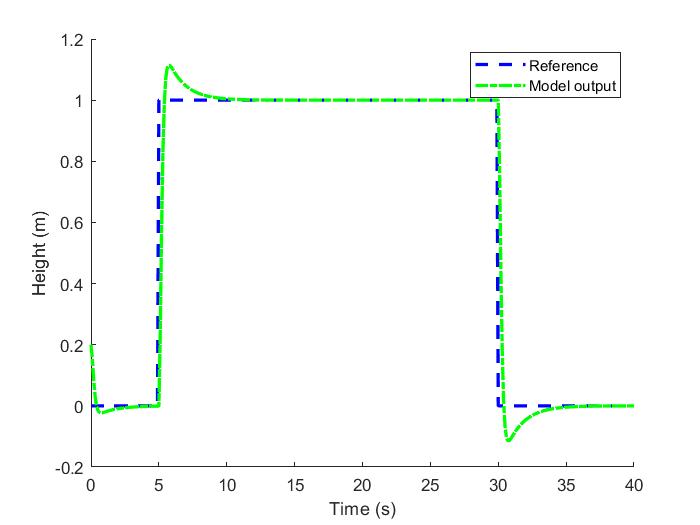
نتایج مربوط به MRAC LQR – Height
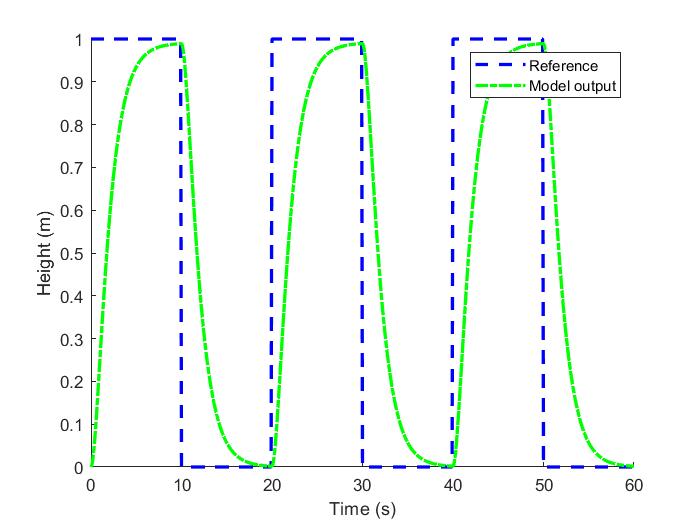
MRAC and LQR in simulation
نتایج مربوطه به MRAC LQR – Square path
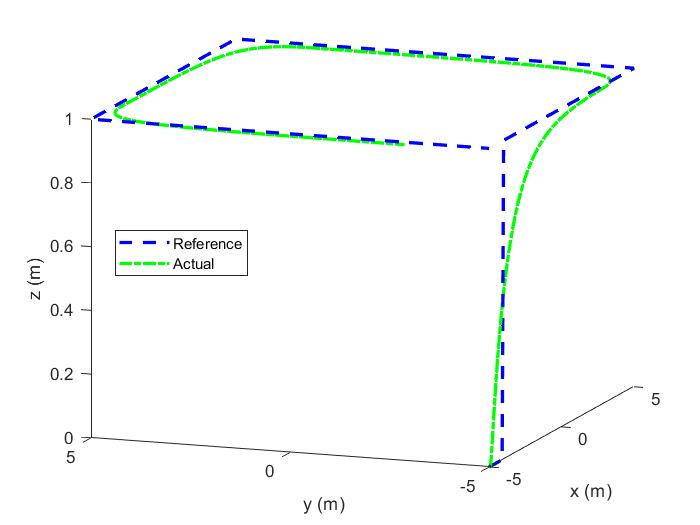
Square trajectory tracking in fault-free and faulty conditions
نتایج مربوط به MRAC LQR – Square path – Fault
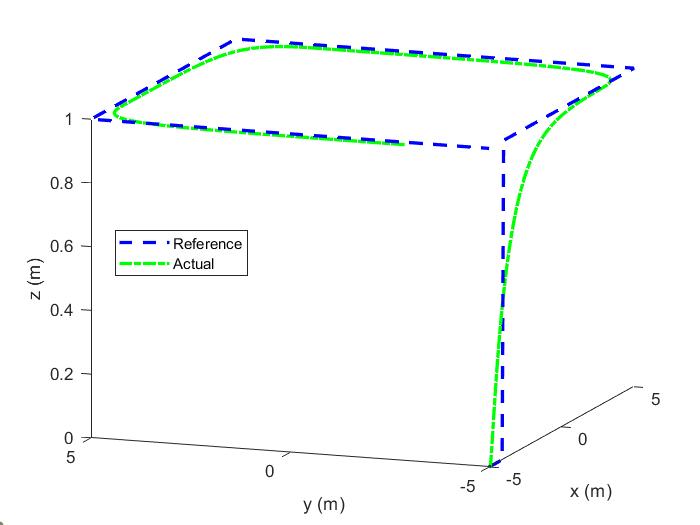
MRAC and LQR controller
نتایج مربوط به PID – Height
PID controller response
نتایج مربوط به Height – Fault
GS-PID controller response
دو نمودار مقاله مربوط به مدل واقعی هستند که قابل شبیه سازی نیستند.
شاید به موارد زیر نیز علاقه مند باشید:
- پایداری و کنترل کوادروکوپتر با وجود از دست دادن کامل یک، دو یا سه پروانه
- الگوریتم ژنتیک موازی در بهینه سازی راه های فواصل بین وسایل نقلیه
- مدلسازی و کنترل تطبیقی کوادروتور
- کنترل مقاوم تحمل پذیر خطای ارتقا یافته مبتنی بر کنترل مود لغزشی تطبیقی فازی PID با همگرایی سریع برای سیستم های غیرخطی شامل عدم قطعیت
شبیه سازی کنترل متحمل خطا/خسارت یک هلیکوپتر کوادروتور با استفاده از کنترل تطبیقی مدل مرجع و PID زمانبندی شده
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.