
توضیحات
طراحی سیستم کنترل موشک با استفاده از کنترل کننده PD همراه با فیلتر پایین گذر مرتبه دوم با تقریب باترورث
در این پژوهش نخست به طراحی سیستم کنترل موشک به کمک کنترل کننده تناسبی – مشتق گیر (PD) پرداخته میشود.
استفاده از کنترل کننده PD علاوه بر آنکه شناخته شده است، در این طراحی نیز پاسخگوی نیازهای کنترلی موشک نیز میباشد.
این کنترل کننده به صورت سری در مدارقرار گرفته و موجب افزایش پایداری سیستم حلقه بسته شده است.
روش ارائه شده جالب و کلی بوده و بوسیله آن می توان به راحتی تغییرات پارامترهای سیستم را نیز در نظر گرفت و در ادامه با بکارگیری از یک فیلتر پایین گذر مرتبه دوم با تقریب باترورث به مقابله با دفع نویزها و پیشگیری از تاثیر اغتشاش با فرکانس بالا، پرداخته شده است.
این کار هم بدون شبکه عصبی و هم با شبکه عصبی پیاده سازی شده است.
فایل missile3 شبکه عصبی هست که اتفاقا خطا هم دارد ولی فایل های دیگر پیاده سازی های مقاله هستند.
برای اجرای missile1 و missile2 کافیه که توی فایل parameters خطوط آخر رو تغییر بدید.
همچنین می تونید قسمت رسم نایکئیویست هم از حالت کامنت در بیارید تا نمودارها رسم بشن.
فایل گزارش البته فقط برای مدل شبکه عصبی تهیه شده و نوشته شده که مدل شبکه عصبی مشکل نوسان را حل میکند.
ظاهرا مدل شبکه عصبی خطا دارد ولی دو مدل دیگر که کار مقاله هستند شبیه سازی شده اند.
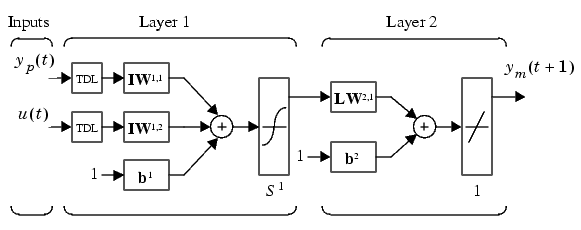
از یک مدل غیرخطی با استفاده از شبکهی عصبی، برای کنترل سیستم استفاده میکنیم.
برای هر کدام از کانالهای ![]() و
و ![]() یک شبکهی عصبی به صورت جداگانه طراحی میکنیم.
یک شبکهی عصبی به صورت جداگانه طراحی میکنیم.
برای کانال ![]() دینامیکهای سیستم با عمق
دینامیکهای سیستم با عمق ![]() برای خروجی سیستم،
برای خروجی سیستم، ![]() برای ورودی سیستم، به عنوان ورودیهای یک شبکهی عصبی MLP با 5 نرون در لایهی پنهان و یک نرون در لایهی خروجی هستند.
برای ورودی سیستم، به عنوان ورودیهای یک شبکهی عصبی MLP با 5 نرون در لایهی پنهان و یک نرون در لایهی خروجی هستند.
اما چون مرتبهی سیستم در کانال ![]() کمتر است، برای کاهش بار محاسباتی شبکهی عصبی در این کانال شبکهی عصبی با استفاده از دینامیکهای سیستم با عمق
کمتر است، برای کاهش بار محاسباتی شبکهی عصبی در این کانال شبکهی عصبی با استفاده از دینامیکهای سیستم با عمق ![]() برای خروجی سیستم، برای ورودی
برای خروجی سیستم، برای ورودی ![]() سیستم آموزش داده میشود.
سیستم آموزش داده میشود.
سیگنال مناسب
واقعیت آن است که سیگنال PRBS دوسطحی در شناسایی سیستمهای غیرخطی موفق نیست.
به همین خاطر شناسایی با یک سیگنال با چند سطح مشکل را حل میکند.
ورودی شناسایی سیگنال APRBS است، که در یک برنامه به صورت زیر تولید شده است:
|
%% APBRS Signal … |
یک مجموعهی دادهی ورودی- خروجی غنی برای شناسایی سیستم با اعمال این سیگنال به آن ساخته میشود.
کد
|
%% System Simulink … |
ساختار شبکهی عصبی
 آموزش شبکهی عصبی
آموزش شبکهی عصبی
 آموزش شبکهی عصبی
آموزش شبکهی عصبی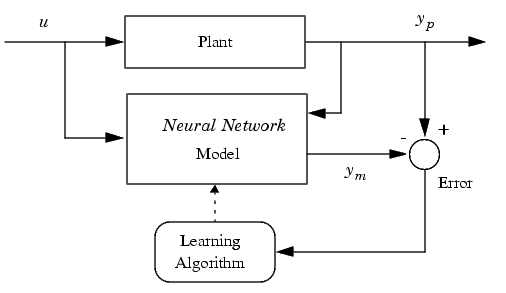

|
% FeedForward … |
نتایج شبیه سازی با متلب:
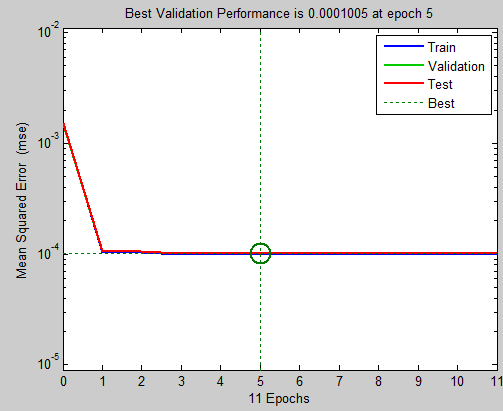
آموزش شبکهی عصبی برای کانال ![]() انجام شده است و تابع هزینه در طول epochهای آموزش به صورت زیر است:
انجام شده است و تابع هزینه در طول epochهای آموزش به صورت زیر است:
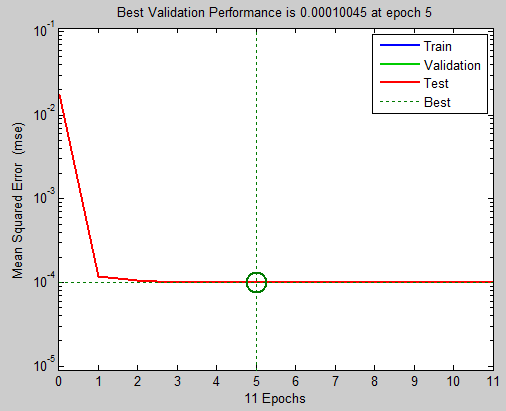
برای کانال ![]() به شیوهی مشابه تابع هزینه در طول epochهای آموزش به صورت زیر است:
به شیوهی مشابه تابع هزینه در طول epochهای آموزش به صورت زیر است:
نتایج کنترل موشک با اتوپایلت عصبی به صورت زیر خواهد بود.
در مقایسه با کنترل توسط کنترلکنندهی PD معمولی عملکرد بهتری داشته است.
کلید واژه : کنترل کننده PD , سیستم موشک, فیلتر پایین گذر, تقریب باترورث, نمودار نایکوئیست, پروژه متلب, پروژه matlab , شبیه سازی با متلب
شبیه سازی
طراحی سیستم کنترل موشک با استفاده از کنترل کننده PD همراه با فیلتر پایین گذر مرتبه دوم با تقریب باترورث
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.