توضیحات
کنترل غیر خطی و مستقل توانهای اکتیو و راکتیو ژنراتور القایی تغذیه دوگانه به صورت متمرکز و غیر متمرکز (dcs)
چکيده
این مقاله در مورد کنترل متمرکز و غیر متمرکز ماشین القایی روتور سیم بندی شده با پل کانورتری سه فاز دو تکه با لینک DC که مابین روتور و شبکه متصل شده است بحث میکند و کنترل مستقل توانهای اکتیو و راکتیو یک ژنراتور القایی با تغذیه دوگانه (DFIG) ، که برای تولید برق در نیروگاههای بادی سرعت متغیر بکار میرود ، مد نظر می باشد.
پس از بیان روابط و اثبات معادلات مورد نیاز در کنترل متمرکز ، یک مدل که نشان دهنده ی کنترل مجزای توان اکتیو و راکتیو، در ژنراتور القایی DFIG میباشد، در محیط Matlab-Simulink شبیه سازی و نتایج آن بررسی شده است.
سپس تفاوت اجرای این نوع پیاده سازی کنترلر را با کنترل توزیع شده مورد بحث قرار خواهیم داد. در روش کنترل توان به روش فیدبک حالت ورودی و خروجی از امتدادیابی شار شبکه استفاده میشود.
واژه هاي كليدي: کنترل غیر خطی، توان اکتیو ، توان راکتیو ، ژنراتور القایی ، کنترل مستقل،dcs
- مقدمه
برای کنترل ژنراتورهای القایی تغذیه دوگانه از روش کنترلبرداری از امتدادیابی شار استاتور استفاده میشود و کنترل کننده های PI مورد استفاده قرار میگیرند نتایج حاصل از شبیه سازی در مرجع [1،4،7] مربوط به کنترلبرداری مشکلاتی از قبیل: عدم وجود دکوپلینگ در حالت گذرا و وجود خطای ماندگار به وجود میآورد.
به دلیل به وجود آمدن این مشکلات به سبب چشم پوشی از مقاوت استاتور، روش غیرخطی کنترل فیدبک ورودی- خروجی در این مقاله مورد استفاده قرار میگیرد ملاحظه خواهد شد که با استفاده از این روش توانهای اکتیو و راکتیو استاتور به طور مستقل و پایدار کنترل خواهد شد با توجه به اینکه ولتاژ استاتور توسط حسگر ولتاژ قابل دسترسی است.
ولی شار استاتور بایستی تخمین زده شود، از امتدادیابی ولتاژ استاتور (بجای امتدادیابی شار) استفاده میشود [3].
همچنین قابل ذکر است که یک ضعف کلّی در روشهای کنترلبرداری آن است که عمل امتدادیابی فقط در حالت ماندگار محقق میشود برای حل این مشکل در یک مختصات مرجع سنکرون که در آن محور d در امتداد بردار فضایی ولتاژ شبکه ثابت تغذیه استاتور قرار گیرد یک کنترل کنندهی غیر خطی مقاوم بر اساس روش خطی سازی ورودی- خروجی طراحی و پیاده سازی خواهد گردید هدف از طراحی کنترلر محاسبه و اعمال ولتاژهای دو محوری روتور میباشد.
- کنترل ماشین القایی تغذیه دوگانه به روش فیدبک حالت ورودی و خروجی
دو نوع خطیسازی دقیق فیدبک (خطی سازی ورودی – حالت و خطی سازی ورودی- خروجی) وجود دارد در مواقعی که معادلات غیر خطی یک مدل یا یک سیستم موجود متغیر …
خروجی مد نظر بود از روش خطی سازی فیدبک حالت ورودی – خروجی استفاده میشود.
- مدل ماشین القایی تغذیه دوگانه همراه با طراحی کنترلکننده:
در این قسمت از قاب مرجع dq که محور d آن با بردار فضایی ولتاژ شبکه همراستا باشد استفاده میشود.
این امتدادیابی قاب مرجع را میتوان امتدادیابی شار شبکه نامید.
در این حالت شار در یک استاتور سه فاز و با صرف نظر از دینامیکهای سیستم در تمام زمانها مستقیماً با ولتاژ استاتور سنکرون خواهد بود.
بر خلاف کنترلبرداری توان اکتیو، راکتیو که با استفاده امتدادیابی شار استاتور انجام میگیرد در روش کنترل توان به روش فیدبک حالت ورودی و خروجی از امتدادیابی شار شبکه استفاده میشود.
امتدادیابی ولتاژ استاتور روش مؤثر در کنترل ماشین القایی نیست امّا در مورد ژنراتور القایی تغذیه دوگانه تأثیرگذار خواهد بود هر چند تفاوت اندکی در امتدادیابی شار استاتور و امتدادیابی شبکه است امّا از نظر عملی اهمیّت زیادی دارند.
3-1 دلایل امتدادیابی ولتاژ استاتور( شار شبکه ) به جای امتدادیابی شار استاتور در طراحی کنترلکننده:
- بسیار دقیقتر و سادهتر بودن امتدادیابی ولتاژ استاتور.
- وجود خطاها در اثر تخمین پارامترها و به دلیل عدم اندازهگیری مستقیم شار در امتدادیابی شار استاتور.
- امتدادیابی ولتاژ استاتور چون توسط حسگر ولتاژ قابل دسترسی میباشد سریعتر انجام میپذیرد.
- مقادیر ویژهی سیستم تحت امتدادیابی ولتاژ استاتور میرایی بیشتری خواهند داشت که سبب افزایش پایداری سیستم میگردد.
- اتّصال نرم و بدون حالت گذرای سیمپیچیهای استاتور به شبکه طی مرحلهی راهاندازی..
حال با فرض یک مدل مغناطیسی خطی، معادلات دومحوری یک ماشین القایی روتور سیم پیچی شده در دستگاه مختصات (d,q) سنکرون ولتاژ استاتور با انتخاب جریان و شار استاتور به عنوان متغیرهای حالت به صورت زیر قابل استخراجند:
(1)…
که در آن ، ، ، به ترتیب جریانها و شارهای دو محوری استاتور میباشند. و ولتاژهای دو محوری روتور و ولتاژ محور d استاتور میباشد. و U به ترتیب سرعت زاویهای و دامنه ولتاژ استاتور، سرعت روتور بر حسب رادیان الکتریکی بر ثانیه، = فرکانس روتور (فرکانس لغزش)،J اینرسی ماشین و گشتاور بار میباشد. پارامترهای µ ، ، ، نیز به صورت ذیل تعریف میشوند:
(2)….
به علاوه، مؤلفههای توان اکتیو و راکتیو تزریقی به مدار استاتور عبارتند از:
(3)…
PS=1.5
Qs= -1.5
از روی معادله قبل با انتخاب مؤلفه های ، که متناظر با جریانهای مرجع اکتیو و راکتیو سمت استاتور هستند، هدف از طراحی کنترل کنندهی غیرخطی، محاسبه و اعمال ولتاژهای دو محوری و به گونهای میباشد که داشته باشیم :
(4)…
لازم به ذکر است که در این جا فرض میشود که جریانهای مرجع یا مشتق مرتبه اول آنها محدود و ثابت هستند. طراحی کنترل فیدبک ورودی – خروجی برای ماشین القایی روتور سیم پیچی شده با تعریف خطاهای جریان و شار استاتور به صورت ذیل:
(5)…
به کمک معادلات دومحوری یک ماشین القایی روتور سیم پیچی شده برای دینامیکهای خطای شار استاتور داریم(6)…
با انتخاب
(7)…
معادلات به فرم خطی تبدیل میشوند ( و شارهای مرجع دو محوری استاتور هستند). همچنین با استفاده از معادلات دومحوری یک ماشین القایی روتور سیمپیچی شده خطای دینامیکی جریانهای استاتور عبارت است از:
(8)…
با استفاده از روش خطیسازی دقیق فیدبک مؤلفه های بردار ولتاژ مرجع دومحوری روتور برای فرمان دادن به اینورتر سمت روتور به صورت ذیل به دست میآیند:
(9)…
با جایگذاری دو معادلهی قبل معادلات خطای دینامیکی سیستم به صورت ذیل به دست می آید:
(10)…
با تعریف متغیرهای جدید به صورت :
(11)…
که در آن ضریب کنترل کننده میباشد، میتوان با استفاده از معیار پایداری لیاپانوف نشان داد که سیستم پایدار است یعنی:
(12)…
افزودن یک جمله انتگرالی به و برای بهبود پایداری و نیز مقاوم کردن کنترل کننده پیشنهادی نسبت به تغییر پارامترهای ماشین ما را در امر کنترل یاری میرساند
- نتایج شبیه سازی:
هدف از شبیهسازی مدل مربوط به DFIG و کنترلکنندهی متناسب با آن صفر نمودن خطای حالت ماندگار میباشد. پس از مدل کردن ژنراتور با استفاده از روابط گفته شده و مدل نمودن کنترلکننده با استفاده از روابط موجود اهداف مورد نظر بررسی خواهند شد.
شبیهسازی این ماشین در حالت ژنراتوری زیر سنکرون و ژنراتوری بالای سنکرون امکانپذیر میباشد امّا در این مقاله به بررسی حالت ژنراتوری زیر سنکرون این ماشین میپردازیم.
در این شبیهسازی فرکانس شبکه HZ50 و ولتاژ خط به خط V380 میباشد و ضرایب کنترلکننده با استفاده از روش سعی و خطا طوری محاسبه شدهاند که خطای حالت ماندگار و ریپل کاهش یافته و به سمت صفر میل کنند.
توان اکتیو مرجع استاتور تا ثانیه دوم در مقدار w550- ، از ثانیه دوم تا چهارم w500، از ثانیه چهارم تا ششم در مقدار w200- و پس از ثانیهی ششم در مقدارw 400- قرار داده شده است و توان راکتیو مرجع استاتور تا ثانیه دومvar 330، از ثانیه دوم تا چهارم var250 و پس از آن در مقدارvar350 قرار داده شده است.
شکل1 تغییرات توان اکتیو و راکتیو را به همراه مقادیر مرجع توان نشان میدهد ملاحظه میشود شکل مربوط به مقادیر واقعی نزدیک به مقادیر مرجع توان اکتیو و راکتیو میباشد که این موضوع ردیابی مقادیر مرجع توانها را بیان میکند به علاوه استقلال توانها، دکوپلینگ مناسب توانهای اکتیو و راکتیو را بازگو میکند.
شکل2 تغییرات توان اکتیو و راکتیو روتور را نشان میدهد انتظار داریم طبق رابطهی Pr= -SPs توان روتور کوچکتر از توان استاتور باشد و همچنین در ناحیهی ژنراتوری زیر سنکرون توان اکتیو روتور مثبت است که این دو موضوع با دقت به شکل 2 مورد تصدیق است.
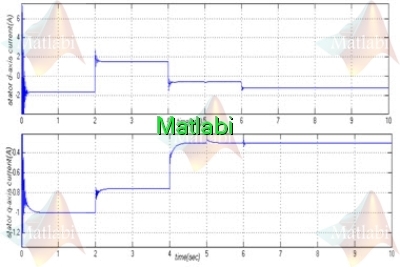
در شکل 3 مقادیر جریانهای دو محوری استاتور در قاب مرجع سنکرون نشان داده شده است طبق رابطهی توان اکتیو و راکتیو استاتور تغییرات مؤلفهی d جریان استاتور همانند تغییرات توان اکتیو و تغییرات مؤلفهی q همانند منفی تغییرات توان راکتیو است.
برای اینکه کارآیی کنترلکنندهی غیر خطی را بررسی کنیم روشهای مختلفی وجود دارد امّا در اینجا با تغییر 15 درصدی مقاومت استاتور کنترل توان اکتیو و راکتیو استاتور را
بررسی میکنیم بهگونهای که در شبیه سازی تمام مقادیر مقاومت استاتور و روتور (نه کنترلکننده) را 15 درصد افزایش میدهیم و خروجیهای مطلوب را دوباره مشاهده میکنیم ملاحظه میشود اگرچه مقداری ریپل در توانهای استاتور و روتور پدید آمد ولی کنترل توان اکتیو و راکتیو استاتور به خوبی صورت گرفت.
شکل 4 مقادیر مرجع و واقعی توان اکتیو و راکتیو استاتور، شکل 5 مقادیر جریانهای دو محور استاتور در قاب مرجع سنکرون را نشان می دهد.
در حالت ژنراتوری بالای سنکرون نیز مقادیر مرجع توان اکتیو و راکتیو همانند حالت زیر سنکرون میباشد.
.



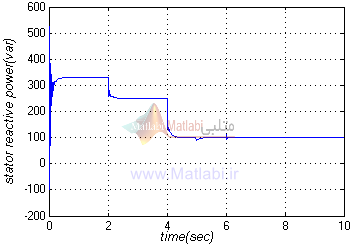
شکل1 مقادیر مرجع و واقعی توان اکتیو استاتور
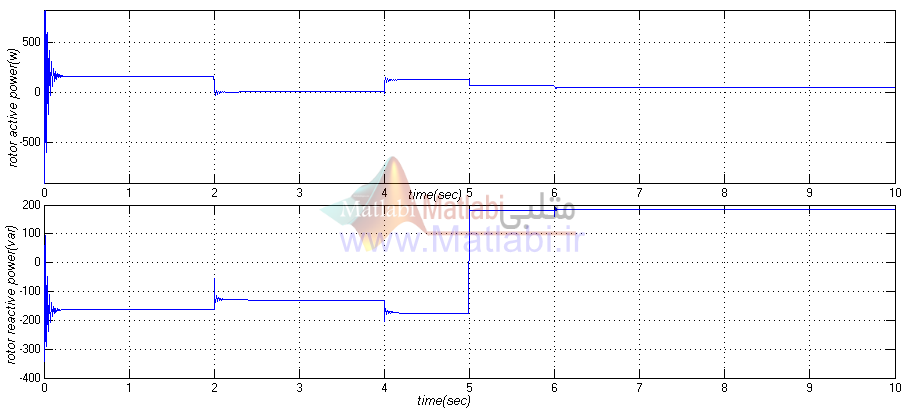
شکل 2 مقادیر توانهای اکتیو و راکتیو روتور


شکل3 مقادیر جریانهای دو محوری استاتور در قاب مرجع سنکرون




شکل 4 مقادیر مرجع و واقعی توان اکتیو استاتور در صورت افزایش 15 درصدی مقاومتهای استاتور و روتور

شکل5 مقادیر جریانهای دو محوری استاتور در صورت افزایش 15 درصدی مقاومتهای استاتور و روتور
- کنترل توزیع شده(dcs)
در این روش کنترلی انجام عملیات کنترل به صورت غیر متمرکز یا توزیع شده می باشد در این سیستم کنترل شبیه سازی شده کلیه ی کنترلرها و سنسورهای محلی در پروسس به اتاق کنترل آورده شده و پس از پردازش نرم افزاری به صورت اتوماتیک و یا به صورت دستی در میآید در نهایت سیگنال متناسب با دستگاه یا المان کنترل شونده به صورت خروجی و متمرکز انجام میشود.
- پیشنهادی در رابطه با کنترل توزیع شده توان اکتیو و راکتیو ژنراتور القایی تغذیه دو گانه
امروزه dcs به عنوان یک ابزار اتوماسیون معمول در آمده که از دیدگاه های مختلف می تواند تعابیر مختلفی داشته باشد از نقطه نظر مهندسی پروسه این سیستم می تواند سبب بهبود میزان تولید و کیفیت و ایمنی و قابلیت اطمینان بر مراحل اجرای یک پروسه به گرفته شود به منظور حذف مشکلات بوجود آمده در سیستم کنترل متمرکز، پیشنهادی در خصوص کنترل توان اکتیو و راکتیو به صورت توزیع شده به گونه ای مطرح میشود که ساختار کلید زنی چند لایه با استفاده از کنترل فیدبکی پریودیک در آن تاثیر گذار است یکی از دلایل به کارگیری سوئیچینگ در مدل شبیه سازی شدهی قبل، جلوگیری از تغییرات ناگهانی در دینامیک سیستم یاد شده می باشد که انعطاف پذیری بالای مدل و سیستم را در پی خواهد داشت .
- نتیجه گیری:
از آنجائیکه پس از تولید توان، برای بررسی پایداری سیستم نوبت به کنترل توانهای اکتیو و راکتیو میرسد، تجزیه تحلیل روشهای مختلف کنترل توان اکتیو و راکتیو در ژنراتورهای القایی تغذیه دو گانه شکل مهمتری به خود میگیرد.
استفاده از روشهای خطی و غیرخطی برای کنترل توان اکتیو و ر اکتیو در ژنراتور القایی تغذیه دوگانه به روش متمرکز و غیر متمرکز در این مقاله مطرح شد، ابتدا بر اساس مراجع یاد شده روش مرسوم کنترلبرداری DFIG مورد بحث قرار گرفت سپس با توجه به مشکلات کنترل کنندههای برداری از جمله عدم دکوپلینگ در حالت گذرا، وجود خطای ماندگار به دلیل چشمپوشی از مقاومت استاتور روش غیرخطی کنترل فیدبک ورودی- خروجی مورد استفاده قرار گرفت. با استفاده از این روش توانهای اکتیو و راکتیو به طور مستقل و پایدار کنترل شدهاند.
کلید واژه : کنترل غیر خطی, توان اکتیو , توان راکتیو , ژنراتور القایی , کنترل مستقل,dcs
شبیه سازی مقاله کنترل غیر خطی و مستقل توانهای اکتیو و راکتیو ژنراتور القایی تغذیه دوگانه به صورت متمرکز و غیر متمرکز
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.