توضیحات
پروژه کنترل بهینه با دستور quadprog
شبیه سازی در محیط متلب انجام شده است و دارای گزارش 2 صفحه ای در قالب ورد است.
کد این پروژه با متلب 2019a به بالا قابل اجراست.
طرح صورت مسئله:
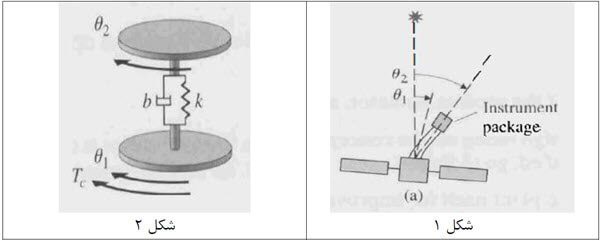
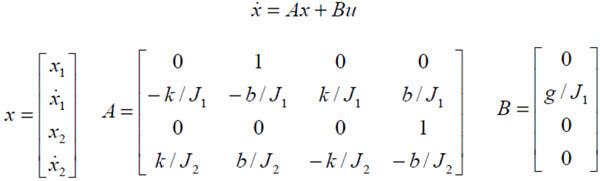
ماهواره ای که در شکل 1 نشان داده شده است، ماموریت دارد که یک بسته ابزاردقیق را در جهت خاصي قرار دهد. این سنسورها باید بر روی یک مکانیسم منعطف قرار گیرند تا از ارتعاشات ناشي از اغتشاشات ماهواره تاثیر نگیرند. گشتاور کنترلي که توسط یک موتور جت تامین مي شود، بدنه اصلي ماهواره را مي چرخاند و به تبع آن سنسورها در جهت مد نظر قرار ميگیرند. ساختار مکانیکي به صورت دو جرم که با میراگر و فنر به هم متصل هستند، مدلسازی ميشود. (شکل 2)
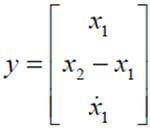
با انتخاب زوایا و سرعت آنها به عنوان متغیر حالت، معادلات خطي شده سیستم به صورت زیر حاصل مي شود:
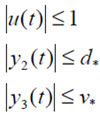
خروجي سیستم، شامل زاویة بدنه، اختلاف زوایا و نرخ زاویة بدنه، به صورت زیر تعریف ميشود:
با بهره گیری از دستور quadprog متلب، کنترل بهینه ای طراحي و شبیه سازی کنید که معیار عملکرد زیر حداقل شود:
![]()
در حالي که قیود زیر برآورده ميشوند:
مقدار مطلوب خروجي، برابر 1.5 (یک و نیم) است، مقادیر پارامترها به قرار زیرند:
وزن ? را چنان تنظیم کنید که ردیابي مرجع مناسب انجام گیرد؛ در این شرایط، منحنيهای سیگنال کنترل و خروجي را در طي بازة زماني صفر تا سي ثانیه ترسیم کنید.
نتیجه شبیه سازی:
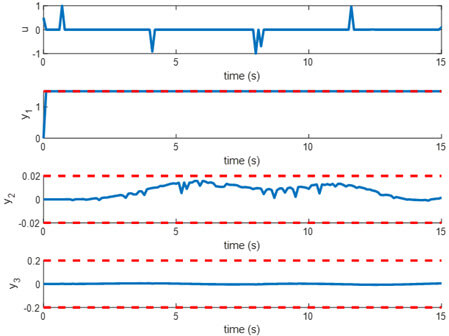
ملاحظه میشود که رهگیری به خوبی انجام شده است و متغیرها نیز در محدوده مجاز هستند.
شبیه سازی
پروژه کنترل بهینه با دستور quadprog
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.