توضیحات
مدل سازی انواع خطا در موتور القایی قفسه سنجابی
این پروژه شامل فایل های شبیه سازی شده با متلب + گزارش کامل + پاورپورینت است.
در اینجا بخشهایی از گزارش اصلی حذف شده است.
روشهاي كلاسيك بكار گرفته شده در اين پروژه جهت تشخيص خطا، اولاً وجود خطا و ثانياً انواع خطاهاي استاتور را از هم تميز ميدهد.
با استفاده از تحليل طيف جريان استاتور و روش قطع موتور از تغذيه، ميتوان خطاي فاز به فاز را از خطاهاي حلقه به حلقه و كلاف به كلاف تشخيص داد.
براي تشخيص خطاي حلقه به حلقه از كلاف به كلاف تنها ميتوان از معيار مقدار rms سرعت موتور در حالت پايدار كمك گرفت.
نتايج تجربي انجام گرفته براي حالت سالم و حالت خطاي حلقه به حلقه روش تحليل طيف جريان موتور را تأييد ميكند.
چكيده
تشخيص خطاهاي سيمبندي استاتور ممكن است به طرق مختلف انجام گيرد ليكن آناليز طيفي جريان خط موتور تا زمانيكه حس كنندههاي جريان به منظور اهداف كنترلي و حفاظتي در مدار هستند، موثرترين روش تشخيص خطا بشمار ميرود.
تئوري تابع سيمپيچي مبناي مدلسازي دقيق موتورهاي القايي قفس سنجابي تحت شرايط نامتقارني ايجاد شده بر اثر خطاهاي سيمبندي استاتور بحساب ميآيد.
در اين پروژه براي تشخيص خطاهايي چون خطاي قطع فاز، حلقهبهحلقه، كلاف به كلاف و فاز به فاز از نتايج حاصل از اين مدلسازي استفاده شده است.
در اين پروژه براي تشخيص اين نوع خطاها از روشهاي آناليز طيف هارمونيكي جريان خط موتور، قطع موتور در حال كار از تغذيه، معيار جريان توالي منفي و معيار مقدار rms سرعت استفاده شده است.
نتايج حاصل از شبيهسازي نشان ميدهد كه روش تحليل طيف جريان استاتور و روش قطع موتور از تغذيه، مؤثرترين روش جهت تشخيص خطاي فاز به فاز ميباشد، و مقدار rms سرعت هم موثرترين معيار جهت تشخيص دو خطاي حلقه به حلقه و كلاف به كلاف از يكديگر ميباشد.
نتايج تجربي بدست آمده صحت نتايج شبيهسازي را تأييد مينمايد.
مقدمه
موتورهاي الكتريكي نقش مهمي را در راهاندازي موثر ماشينها و پروسههاي صنعتي ايفا ميكنند.
بخصوص موتورهاي القايي قفسه سنجابي كه بعنوان اسب كاري صنعت ميشناسند.
بنابراين تشخيص خطاهاي اين موتورها ميتواند فوايد اقتصادي فراواني در پي داشته باشد.
نتایج
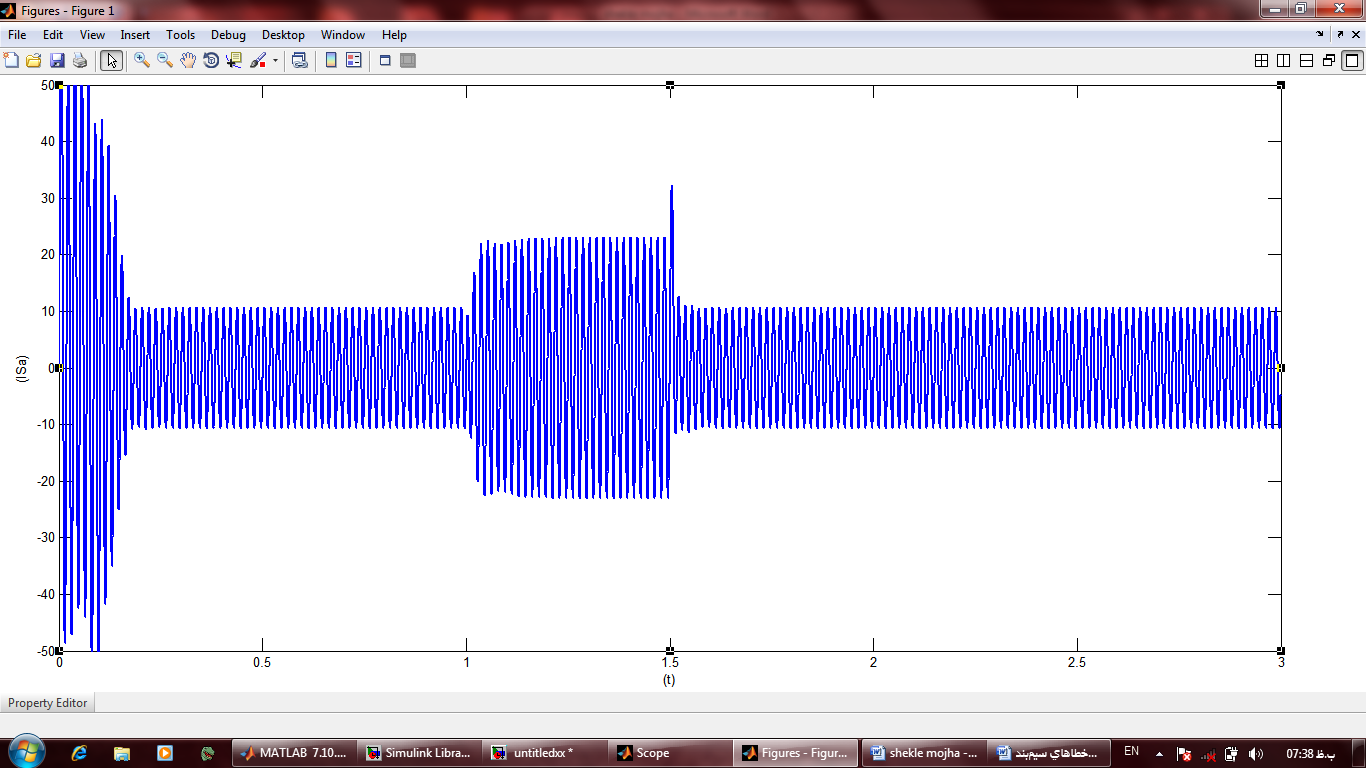
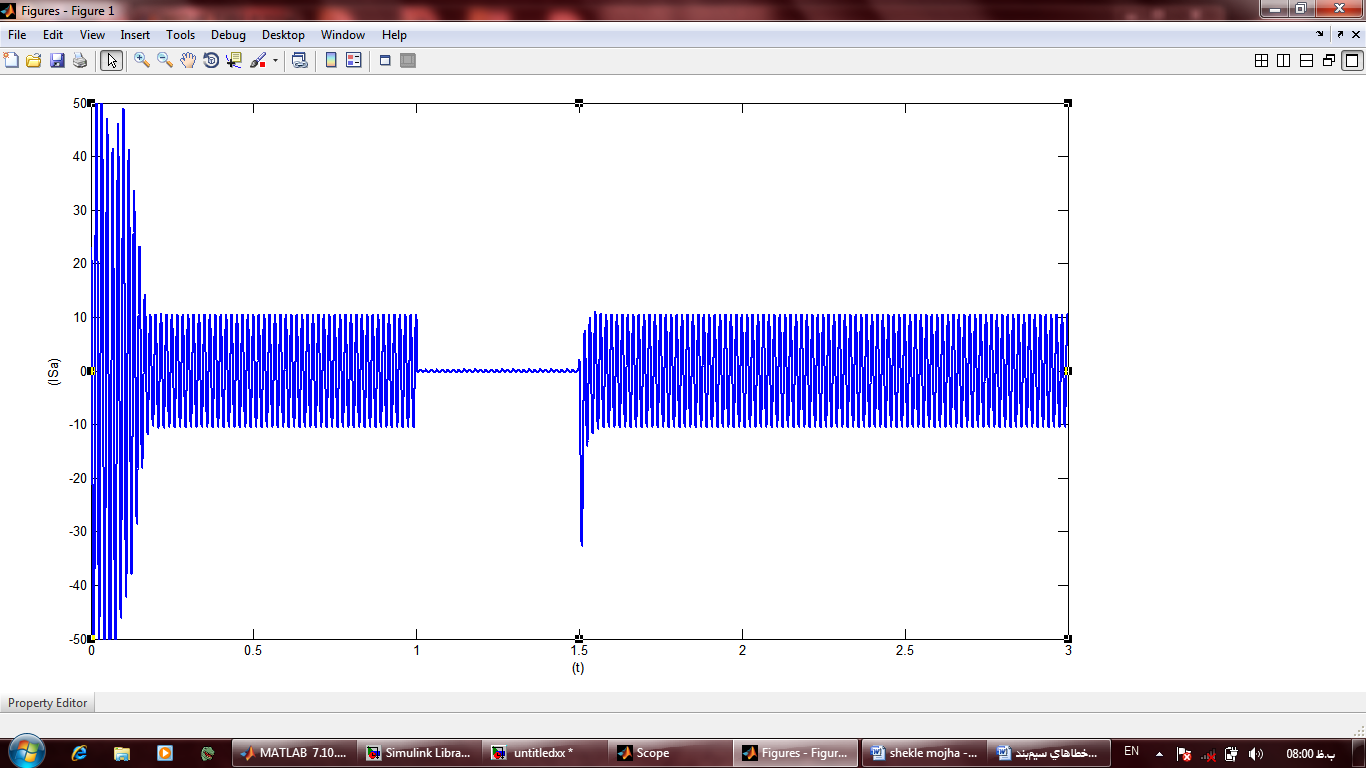
در نمودارهای زیر در ثانیه 1 خطا(قطع فاز استاتور) رخ داده و در ثانیه 5/1 رفع شده است .
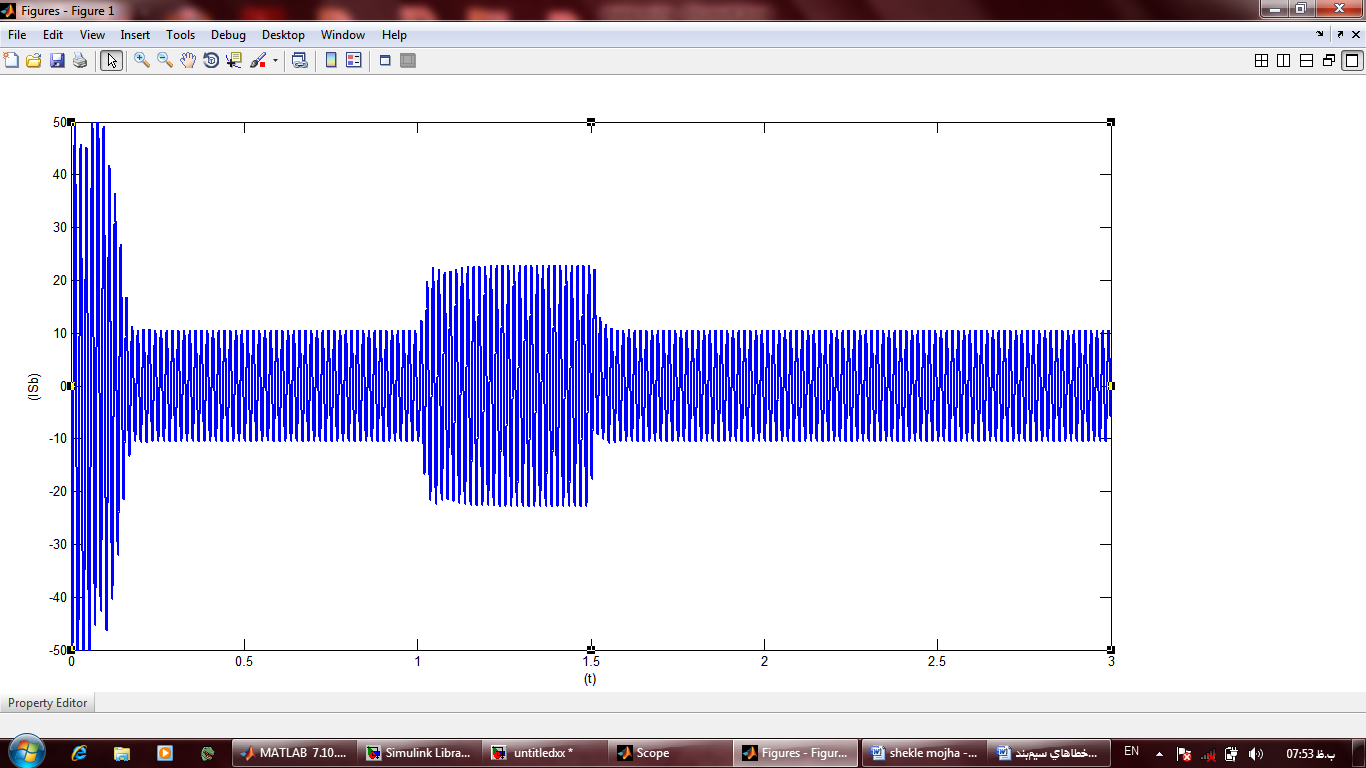
جریان فاز b استاتور طی قطع و وصل مجدد فاز a
جریان فاز c استاتور طی قطع و وصل مجدد فاز a
جریان فاز a استاتور طی قطع و وصل مجدد فاز a

نمودارگشتاور روتور طی قطع و وصل مجدد فاز a
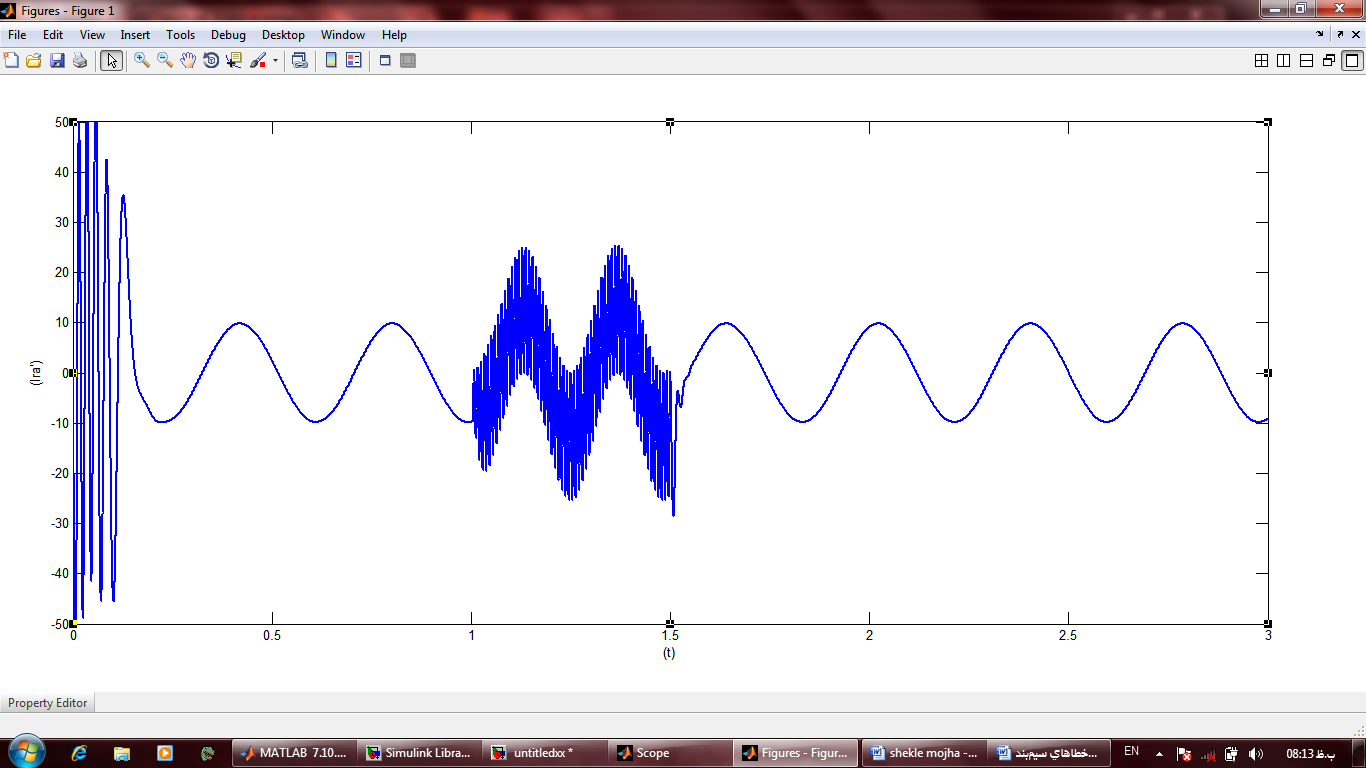 شکل موج جریان روتور طی قطع و وصل مجدد فاز a استاتور
شکل موج جریان روتور طی قطع و وصل مجدد فاز a استاتور
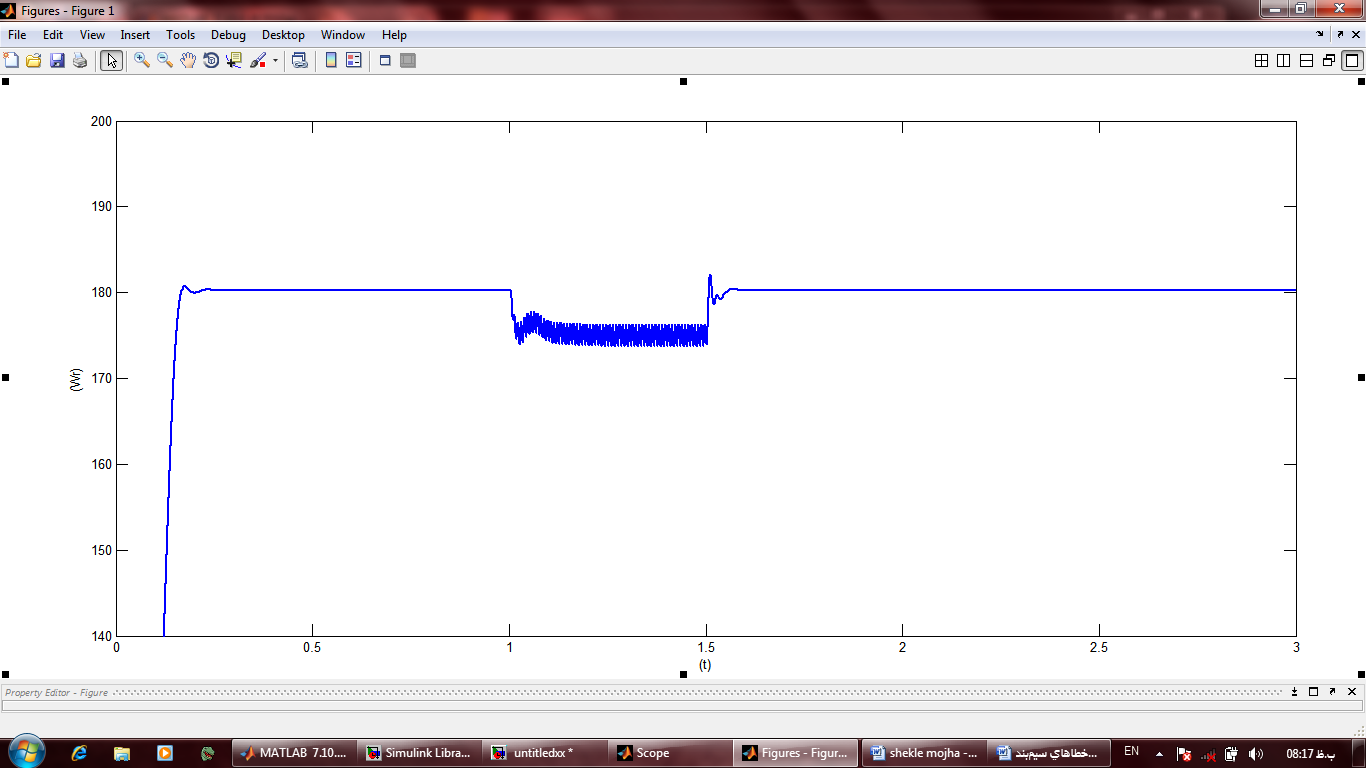
نمودار سرعت روتور طی قطع و وصل مجدد فاز a
فرض كنيم ماشين در شرايط كار نامي به سر ميبرد و پس از مدتي فاز a استاتور قطع گردد و سپس بعد از اندک زمانی اين خطا رفع شود.
همانطور که مشاهده می شود در اين مدت زمان به علت به هم خوردن تعادل موجود در شاردورهاي الكتريكي، گشتاور مغناطيسي ماشين دچار نوسان ميگردد و اين نوسان حول نقطه كار ماشين است.
در اين مدت زمان با توجه به نمودارهاي حاصله، نويز در مشخصههاي ماشين مشاهده ميشود (به دليل عدم تعادل موجود در جريانهاي ماشين ia=0)و جريانهاي ماشين دچار اعوجاج ميگردد.
اين نويز به وجود آمده در نمودارهاي جريان، گشتاور و گشتاور سرعت به وضوح قابل مشاهده است.
براي تأمين گشتاور مغناطيسي مورد نياز ماشين دامنه جريان در دو فاز ديگر زياد ميشود.
در هنگام اين افزايش چون جريان استاتور از فركانس منبع پيروي ميكند، يك فركانس ثابت دارد ولي شكل موج جريان روتور دچار يك هارمونيك ميگردد كه اين هارمونيك ناشي از نويز گشتاور است.
از سوي ديگر نمودار گشتاور ـ سرعت حول نقطه كار دچار نوسان ميگردد.
اين نوسان در سرعت ماشين نيز تأثير ميگذارد.
و آن را دچار اعوجاج اندكي ميكند.
با توجه به اينكه ماشين دو فاز شده است، انتظار داريم در فاز a نيز ولتاژي با دامنه كمتر نسبت به دو فاز ديگر داشته باشيم و علت آن همانند حالت مثلث، ستاره باز القاء ولتاژ توسط دو فاز ديگر روي فاز a است كه 120 درجه اختلاف فاز دارد.
ولتاژ دو فاز ديگر نيز كمي كاهش مييابد.
(با افزايش جريان دو فاز b و c، افت ولتاژ روي اين دو فاز نيز افزايش مييابد).
وقتي ماشين دچار اين خطا ميشود، جريان به شدت در دو فاز ديگر زياد شده و اين سه نتيجه را به دنبال دارد:
1- در درازمدت باعث سوختن سيمپيچي ميشود.
2- گشتاور نوسانی ، سيستم مكانيكي ماشين را وارد تنشهاي شديدی ميکند،كه باعث آسيبديدگي به اين بخش ميشود.
3- به دليل گشتاور نوساني، بارهاي حساس دچار مشكل ميشوند.
مدلسازي خطاي حلقه به حلقه و كلاف به كلاف
در ابتداي امر سادهترين حالت را كه كلاف فقط يك دور دارد را درنظر ميگيريم و چند نتيجه مهم را از آنجا بدست ميآوريم.
شكل (1) دياگرام سيم بندي يك فاز با سه كلاف متحدالمركز يك دوري را نشان ميدهد.
فرض ميشود كه اتصال كوتاه كلاف به كلاف بين نقاط a و b همانطور كه در شكل نشان داده شده است اتفاق افتاده باشد.
واضح است كه مسير جريان گردشي بسته ميشود.
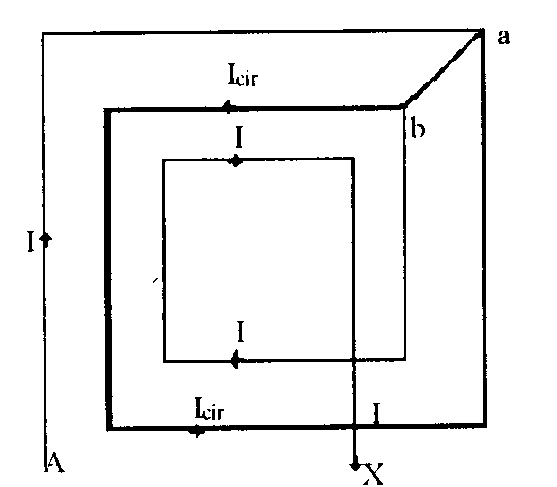
شکل3- اتصال کوتاه کلاف به کلاف بین نقاط a و b
مدلسازي خطاي فاز به فاز
در اين نوع خطا فاز D وجود ندارد و در نتيجه بحثي كه براي خطاهاي قبلي در مورد فاز D داشتيم در اينجا نداريم.
وقتي خطاي فاز به فاز رخ ميدهد فازهايي كه بهم اتصال كوتاه شدهاند هر كدام تبديل به دو فاز ميشوند يعني در مجموع پنج جريان مجهول خواهيم داشت.
سيمبندي استاتور با وجود خطاي فاز به فاز (فاز a و فاز c) در شكل (6) نشان داده شده است.
شكل (7) مدار معادل فازهاي a و c بعد از خطا را نشان ميدهد.
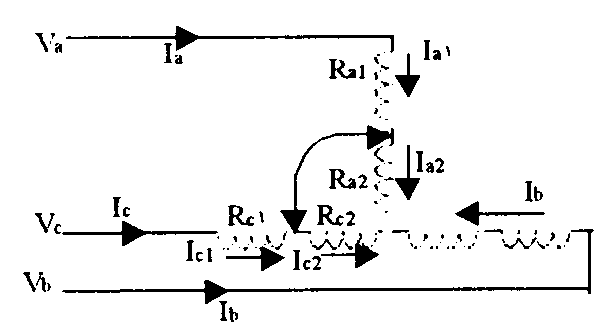
شکل 6- سیم بندی استاتور در حالتیکه خطای فاز به فاز رخ داده باشد
شکل 7- مدار معادل فازهای a وc بعد از اتصال کوتاه شدن خطای فاز به فاز
نتايج شبيهسازي
موتور موردنظر جهت انجام شبيهسازي يك موتور 5/7 اسب بخار، 460 ولت، 4 قطب و سه فاز اتصال ستاره ميباشد كه فركانس كاري آن 60 هرتز ميباشد.
استاتور اين موتور داراي 36 شيار و رتور آن داراي 28 ميله ميباشد.
در سيمبندي اين ماشين دو كلاف در هر فاز در هر زوج قطب موجود است يعني چون ماشين چهار قطبي است در هر فاز چهار كلاف وجود دارد.
هر كلاف هم N دوري ميباشد.
سيمبندي هم دو طبقه پيچيده شده است.
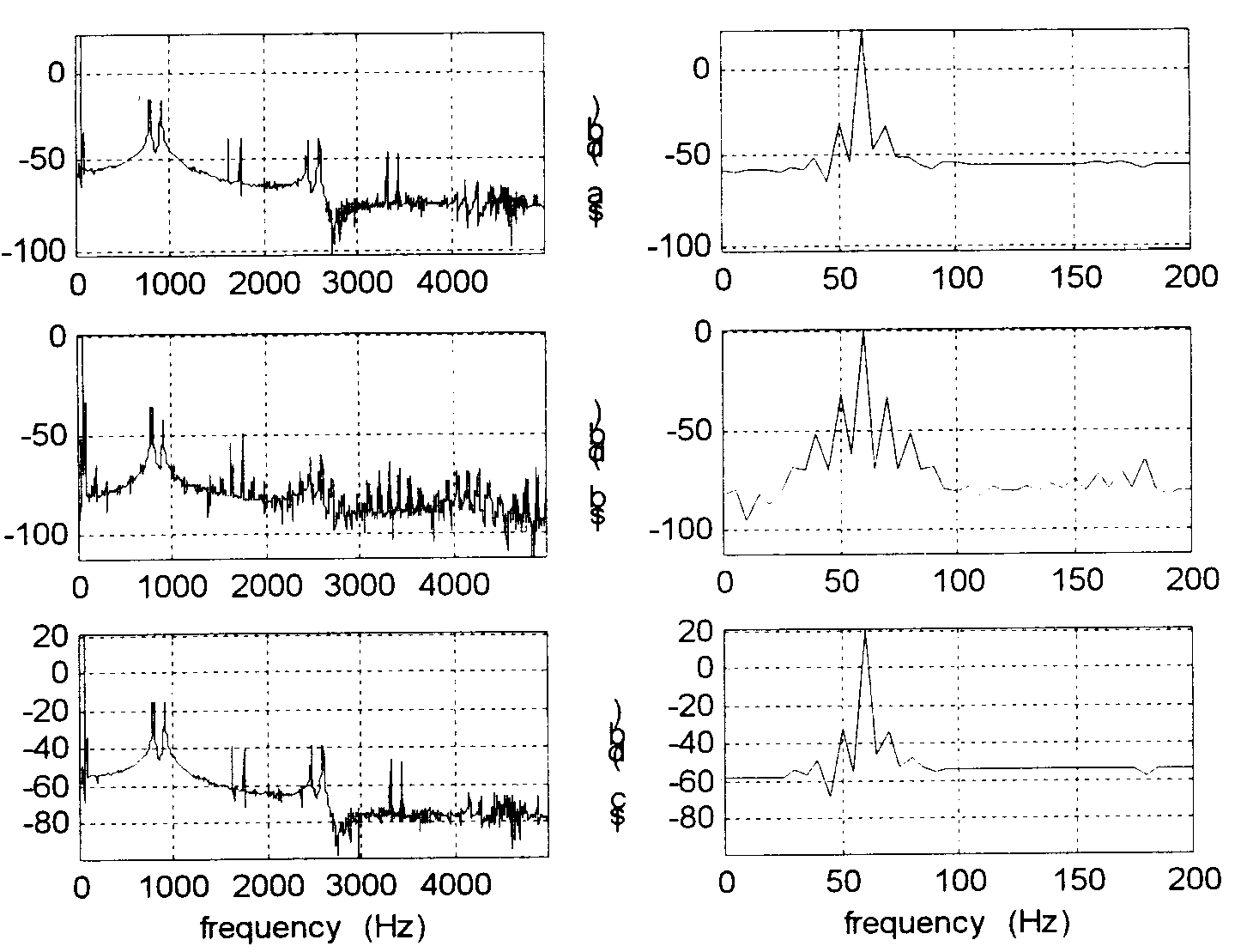
از سه جريان بيباري خط موتور در حالت سالم ماشين و در حالتهاي خطاي استاتور FFT گرفته ميشود.
نمودارهای (6) تا (10) طيف سه جريان خط موتور را به ترتيب در حالتهاي سالم، خطاي حلقه به حلقه، خطاي كلاف به كلاف و خطاي فاز به فاز نشان ميدهند.
در اين شكلها محور عمودي بر حسب دسيبل و محور افقي بر حسب هرتز ميباشد.
شکل 8- طیف جریان های بی باری خط موتور در حالت سالم

شکل 9- طیف جریان های بی باری خط موتور در حالت خطای حلقه به حلقه
جريان توالي منفي به بار مكانيكي بستگي ندارند و تابع درصد خطا ميباشد، از اينرو آن ميتواند يك پارامتر مفيد براي سيستم تشخيص خطا باشد.
شكل (11) جريان توالي منفي را در حالتهاي سالم، خطاي حلقه به حلقه، خطاي كلاف به كلاف و خطاي فاز به فاز نشان ميدهد.
از روي شكل ديده ميشود كه هر چه شدت خطا زياد ميشود مقدار توالي منفي جريان هم زياد ميشود.
از اينرو جريان توالي منفي براحتي وجود خطا را آشكار ميسازد.
شکل 10- طیف جریان های بی باری خط موتور در حالت خطای فاز به فاز
شکل 11- نمودار جریان توالی منفی در حالتهای سالم،خطای حلقه به حلقه،خطای فاز به فاز
با توجه به شكل (12) ديده ميشود كه هر چه درصد خطا در خطاهاي حلقه به حلقه و كلاف به كلاف بالا رود دامنه ريپل سرعت در حالت پايدار ماشين نيز افزايش مييابد. از اينرو مقدار rms سرعت را ميتوان بعنوان پارامتري جهت تشخيص دو خطاي حلقه به حلقه و كلاف به كلاف از يكديگر بكار برد.
شکل 12- نمودار سرعت موتور در حالت پایدار برای خطاهای حلقه به حلقه و کلاف به کلاف
نتايج استفاده از روش قطع موتور در حال كار از تغذيه و مشاهده ولتاژهاي القايي روي استاتور در حالتهاي سالم و خطاي استاتور در شكلهاي (13) آمده است.
همچنانكه از روي شكلها ديده ميشود با اين روش براحتي وجود خطا آشكار ميشود.
در اینجا بخش هایی از گزارش نیامده است.
شکل 13- نمودار ولتاژ خط وقتی موتور در حال کار از شبکه جدا شود(1- حالت سالم
2- حالت خطای حلقه به حلقه 3- حالت خطای کلاف به کلاف 4- خطای فاز به فاز)
معيار تشخيص خطا
نتايج بررسي طيف هارمونيكي جريانهاي استاتور چنين است:
الف- در خطاي حلقه به حلقه و كلاف به كلاف هارمونيك سوم (HZ180) وجود دارد (هارمونيك اصلي HZ60 ميباشد).
اما در خطاي فاز به فاز هارمونيك سوم مشاهده نميشود.
ب- در خطاي حلقه به حلقه و كلاف به كلاف، مؤلفههاي جريان در فركانسهاي HZ30 و HZ90 وجود دارد.
هر چه درصد خطا بالا رود مقدار اين مؤلفهها افزايش مييابد.
البته اگر درصد خطا پايين باشد مقدار اين مؤلفهها ناچيز خواهد بود.
ج- درخطاي فاز به فاز، در فركانسهاي HZ50 و HZ70 مؤلفه جريان وجود دارد و در نوع ديگر از خطاي فاز به فاز يعني با درصد خطاي متفاوت با قبلي (خطا در همان شيار چهارم استاتور است) در فركانسهاي HZ45 و HZ75 مؤلفه جريان داريم.
در خطاي فاز به فاز مولفه جريان در فركانس HZ900 وجود دارد كه در ساير حالتهاي خطا مشاهده نميشود.
د- در حالت سالم بودن ماشين، هارمونيك سوم وجود ندارد و همچنين در هيچ يك از فركانسهاي 30، 45، 50، 70، 90، 75 و 900 هرتز مؤلفه جريان نداريم.
هارمونيك سوم در ساير حالات نامتقارني مثل نامتقارن بودن منبع ولتاژ هم وجود دارد و نميتوان از آن بعنوان وجود خطا كمك گرفت.
ولي روي ساير مؤلفههاي فركانسي ميتوان تكيه كرد.
با بررسي روشهاي بكار گرفته شده جهت تشخيص خطا ميتوان گفت كه تمامي اين روشها، وجود خطا حتي خطاي حلقه به حلقه را به آساني تشخيص ميدهند.
منتها روش طيف هارمونيكي جريان و روش قطع موتور از تغذيه خطاي فاز به فاز را از دو خطاي ديگر تميز ميدهد.
اما براي تشخيص خطاي حلقه به حلقه از كلاف به كلاف تنها ميتوان از معيار مقدار rms سرعت كمك گرفت.
Modeling, Simulation, and Control of an Oil Heater
نتايج عملي
موتور موردنظر جهت انجام آزمايش يك موتور القايي قفسه سنجابي 3 اسب بخار، 380 ولت، چهار قطب، سه فاز و اتصال ستاره ميباشد، كه فركانس كاري آن 50 هرتز است.
استاتور اين موتور داراي 36 شيار و رتور آن داراي 28 ميله ميباشد.
سيمبندي اين موتور به صورت يك طبقه است و براي هر فاز دو كلاف موجود است. كلافها متحدالمركز هستند و هر كلاف نيز داراي 132 دور ميباشد.
بنابراين در هر شيار 44 دور قرار ميگيرد.
آزمايشات در حالت بيباري موتور صورت گرفته است بدين دليل كه براي يك ماشين باردار، تشخيص خطاي سيمپيچي استاتور بسيار مشكل است چون با ساير حالات نامتقارني مثل نامتقارن بودن منبع ولتاژ اشتباه ميشود.
ابتدا حالت سالم موتور، مورد آزمايش قرار گرفت و سپس با ايجاد خرابي حلقه به حلقه در يكي از كلافهاي يكي از فازهاي استاتور، آزمايشات اتصال كوتاه حلقه به حلقه در حالت بيباي روي موتور انجام گرفت و ولتاژ خط اعمالي به موتور، جريان فاز معيوب و جريان اتصال كوتاه و جريان يكي از فازهاي سالم موتور اندازهگيري شد.
از جريان خط موتور در حالتهاي سالم و خطاي حلقه به حلقه FFT گرفته شد و نتايج در شكلهاي (14) و (15) آمده است.
شکل 14- طیف هارمونیکی جریان خط بی باری موتوردر حالت سالم
شکل 15- طیف هارمونیکی جریان های خط بی باری موتوردر حالت خطای حلقه به حلقه
نتيجهگيري
روشهاي كلاسيك بكار گرفته شده در اين پروژه جهت تشخيص خطا، اولاً وجود خطا و ثانياً انواع خطاهاي استاتور را از هم تميز ميدهد.
با استفاده از تحليل طيف جريان استاتور و روش قطع موتور از تغذيه، ميتوان خطاي فاز به فاز را از خطاهاي حلقه به حلقه و كلاف به كلاف تشخيص داد.
براي تشخيص خطاي حلقه به حلقه از كلاف به كلاف تنها ميتوان از معيار مقدار rms سرعت موتور در حالت پايدار كمك گرفت.
نتايج تجربي انجام گرفته براي حالت سالم و حالت خطاي حلقه به حلقه روش تحليل طيف جريان موتور را تأييد ميكند.
تحلیل خطای اتصال کوتاه بر عملکرد موتورهای القایی در یک شبکه نمونه
در این قسمت فرض بر آن شده است ،که یک مجتمع صنعتی از بارهای الکتریکی شامل بارهای ثابت (مانند بار روشنایی ، درایوهای الکتریکی و بارهای دیگر) و بارهای پویا(مانند موتور های الکتریکی) تشکیل یافته است.
موتور های القایی بکار رفته دارای توان های متفاوتی می باشند که ممکن است ، در روند کاری همدیگر تاثیر بگذارند.
هدف این قسمت از پروژه، تحلیل کل ساختار بر اساس رخدادهایی از پیش فرض شده می باشد.
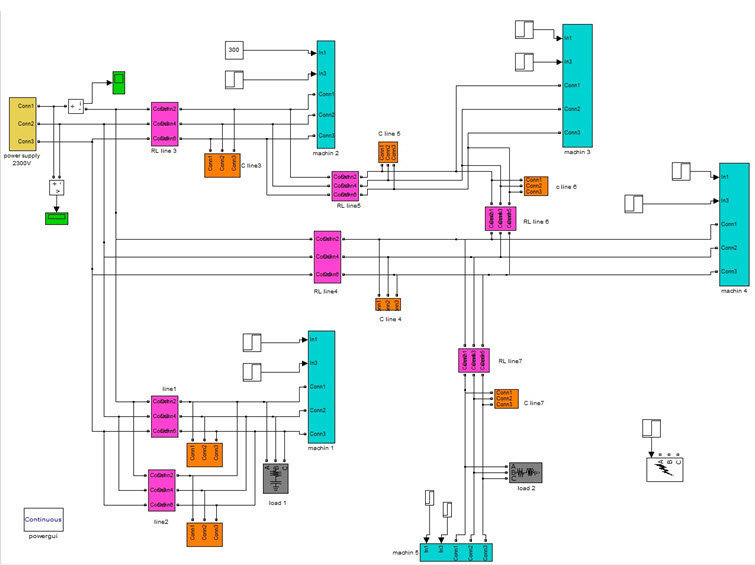
برای نیل به این هدف، یک شبکه فرضی را بنا نهادیم که دیاگرام تک خطی آن مطابق شکل 16می باشد .

شکل 16- دیاگرام تک خطی یک شبکه نمونه
تحلیل اتصال کوتاه:
در حالت کلی 3 نوع اتصال کوتاه وجود دارد :
اتصال کوتاه تک فاز ، دو فاز و سه فازکه به دو دسته اتصال کوتاه رفع شدنی و اتصال کوتاه مدت دار تقسیم می شوند که مورد دوم کمتر اتفاق می افتد .
آثار اتصال کوتاه 3 فاز و تک و دو فاز عملا شبیه هم است تنها تفاوت در میزان نوسانات و رفتار جزئی ماشین ها می باشد .
در حالت کلی در اثر وقوع اتصال کوتاه در یکی از باس ها میزان جریان کشیده شده از منبع به شدت افزایش پیدا می کند .
(در این آزمایش به حدود 6 پریونیت می رسد)
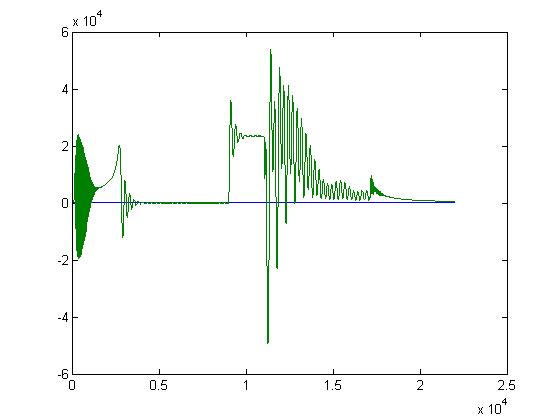
شکل 17- جریان کشیده شده از منبع در اثر وقوع اتصال کوتاه در باس4
در محل اتصال کوتاه وابسته به نزدیکی به کدام باس موتور های القایی موجود در آن باس بیشتر درگیر اتصال کوتاه می گردند و دچار یک گشتاور منفی می شوند و به محل اتصال کوتاه جریان تزریق می کنند (تبدیل به ژنراتور می شود) با توجه به نوع اتصال کوتاه موتور ها واکنش های متفاوتی دارند.
- اگر رله ها عمل کنند و اتصال کوتاه را از بین ببرند ، ماشین ها وابسته به باری که روی آنها قرار دارد و مدت زمان تداوم اتصال کوتاه، واکنش های متفاوتی می دهند. اولین واکنش موتور ها تولید گشتاور عظیم منفی است که به شدت ماشین را ناپایدار می کند و سبب تولید یک جریان منفی زیاد می شود.
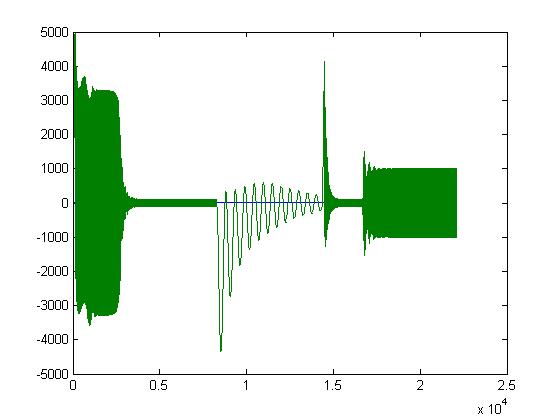
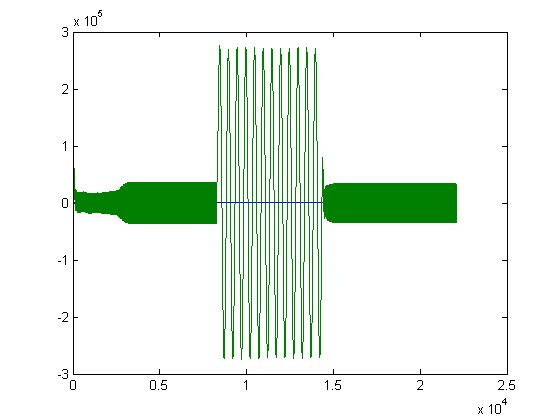
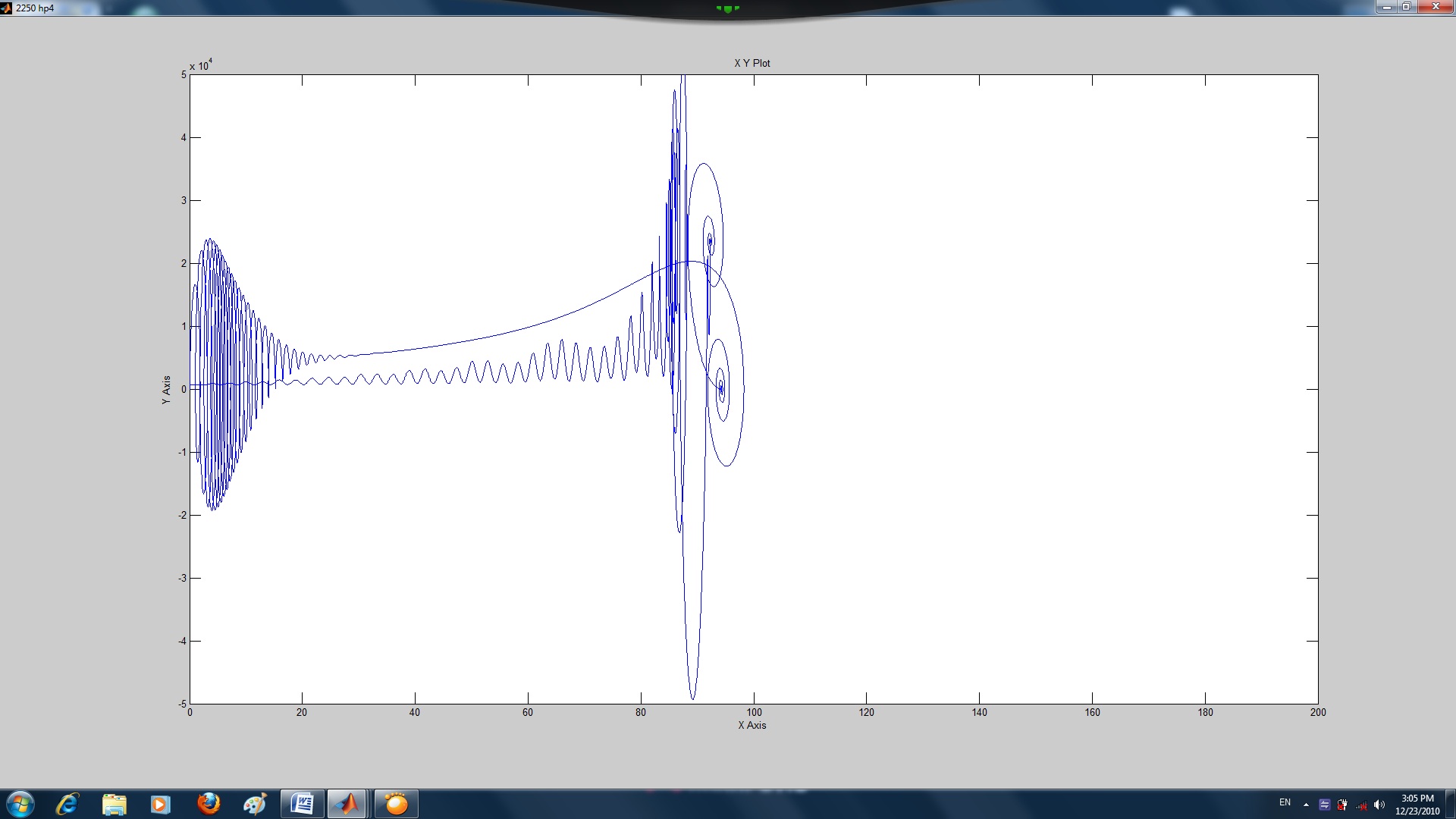
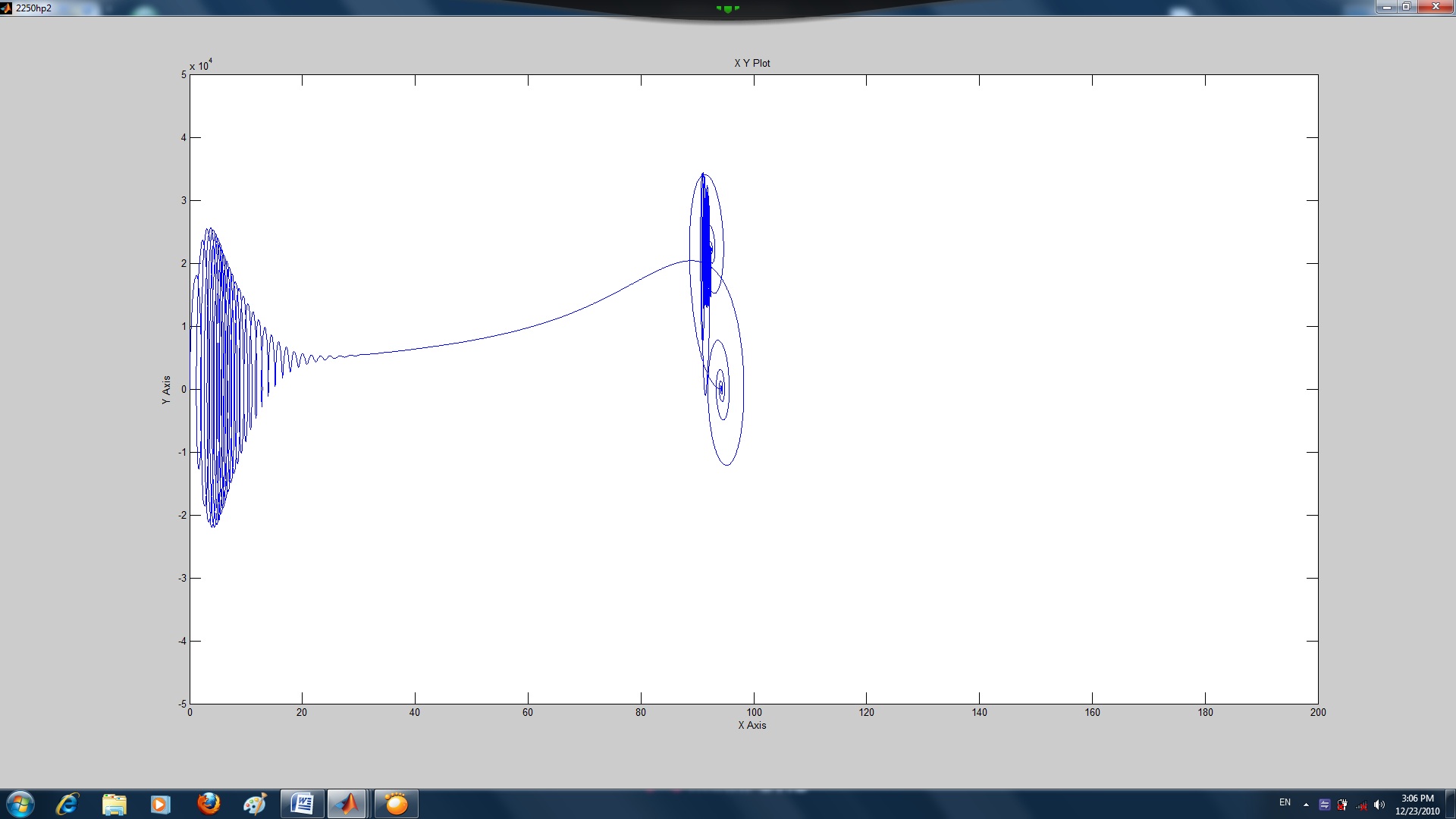
شکل 18- نمودار جریان موتور 2250 اسب باس 4 که در ثانیه 4 باردار می شود در اثر اتصال کوتاه در باس 4 که در ثانیه 3 به مدت 0.2 ثانیه رخ داده است

شکل 19- نمودار گشتاور موتور 2250 اسب باس 4 که در ثانیه 4 باردار می شود در اثر اتصال کوتاه در باس 4 که در ثانیه 3 به مدت 0.2 ثانیه رخ داده است
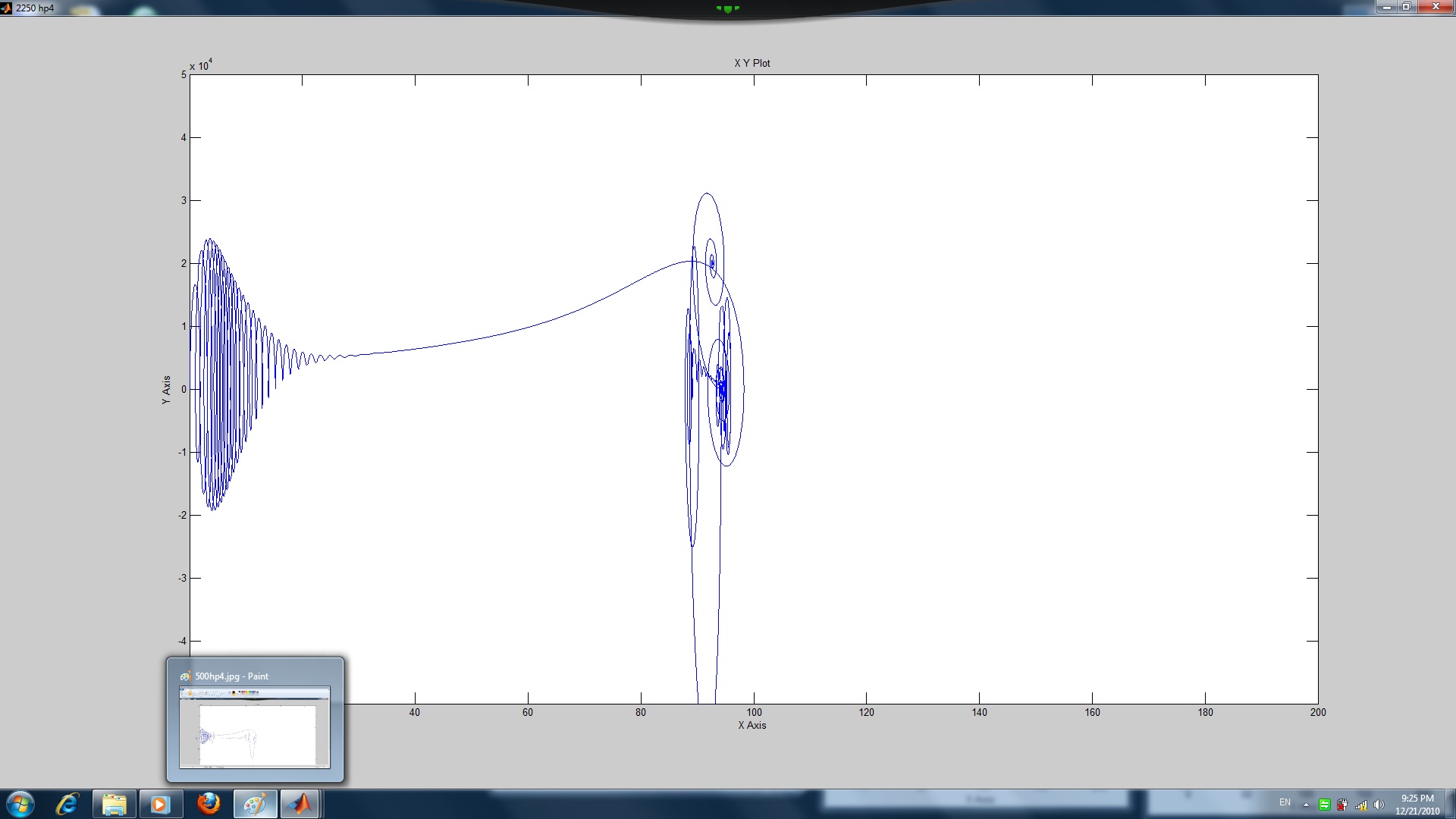
شکل 20- نمودار گشتاور-سرعت موتور 2250 اسب باس 4 که در ثانیه 4 باردار می شود در اثر اتصال کوتاه در باس 4 که در ثانیه 3 به مدت 0.2 ثانیه رخ داده است
پس از شرایط اتصال کوتاه ماشین مجددا راه اندازی می شود و در شرایط استارت قرار می گیرد و در اینجا درست مانند حالت راه اندازی، ماشین دچار واکنش می شود.
اگر فرض کنیم که بار بعد از اتصال کوتاه اعمال شده باشد، همانند شرایط معمولی ماشین از نقطه کار معمولی به نقطه کار جدید می رود ولی اگر قبل از اتصال کوتاه ماشین تحت بار قرار گیرد در لحظه اتصال کوتاه و پس از عبور از شرایط ناپایدار آن ماشین مجددا راه اندازی می شود که اگر بار روی آن از بیشینه گشتاور راه اندازی بیشتر باشد ماشین از کار می افتد.

شکل 21- گشتاور اثر اتصال کوتاه روی موتور 2250 اسب بخار باس4 که از قبل اتصال کوتاه تحت بارقرارگرفتهاست(پایدار)
شکل 22- نمودار گشتاور اثر اتصال کوتاه روی موتور 2250 اسب بخار باس 4 که از قبل اتصال کوتاه تحت بار قرار گرفته است(ناپایدار)

شکل 23- نمودار جریان اثر اتصال کوتاه روی موتور 2250 اسب بخارباس 4 که از قبل اتصال کوتاه تحت با قرارگرفته است(پایدار)
- اگر رله ها عمل نکنند در این صورت تمام شینها با یک اختلاف زمانی، ناپایدار می شوند و جریان کل شبکه به شدت بالا می رود .
- حال اگر باس ما توانایی تامین جریان بی نهایت را داشته باشد در این صورت بار هایی که از محل اتصال کوتاه دور هستند و به طور مستقیم به منبع متصل می باشند تاثیر به مراتبی کمتری می پذیرند (همانند باس 1)
شکل 24- نمودار گشتاور سرعت موتور 2250 اسب بخار باس4که ناپایدارشده است
شکل 25- نمودار گشتاور سرعت موتور 2250 اسب بخار باس 2 که ناپایدار نشده ولی نوسانی گشته است

شکل 26- نمودار گشتاور سرعت موتور 2250 اسب بخار باس 1که ناپایدار نشده است
پيوست: پارامترهاي ماشين
| 3hp, 380v, 4-pole, 3phase
JJ=.012; L=90*10^(-3); g=.456438*10^(-3); r=45*10^(-3); N=132; rs=3.1; ls=.028; Rb=50.392e-6; Lb=.28e-6; Re=1.56e-6; Le=.03e-6; |
7.hp, 460v, 4-pole, 3phase
JJ=.012; L=102.4128*10^(-3); g=.456438*10^(-3); r=63.2968*10^(-3); N=90; rs=3.5332; ls=.028; Rb=68.34e-6; Lb=.28e-6; Re=1.56e-6; Le=.03e-6; |
رفرنسها: Transient Analysis of Cage Induction Machines Under Stator, Rotor Bar and End Ring Faults
Electromechanical Transients in a Three-phase Induction Motor During Phase Failure and Plugging
Recent Advances in Modeling and Online Detection of Stator Interturn Faults in Electrical Motors
کلید واژه: پروژه درس تئوری جامع ماشینهای الکتریکی
شبیه سازی
مدل سازی انواع خطا در موتور القایی قفسه سنجابی
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.