توضیحات
Adaptive robust control of fully constrained cable robots: singular perturbation approach
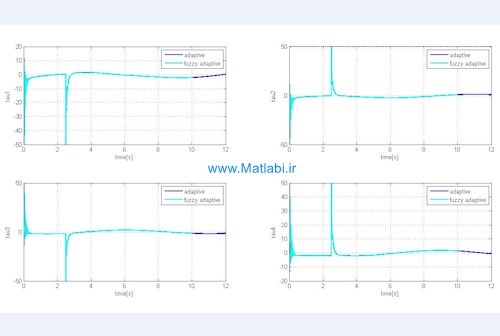
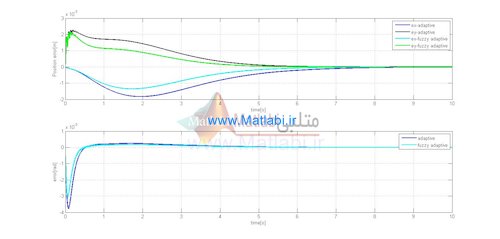
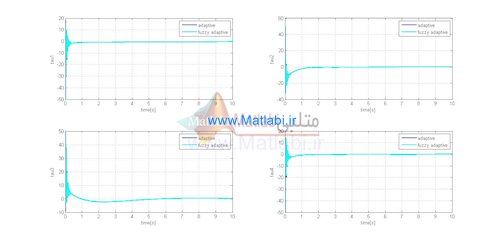
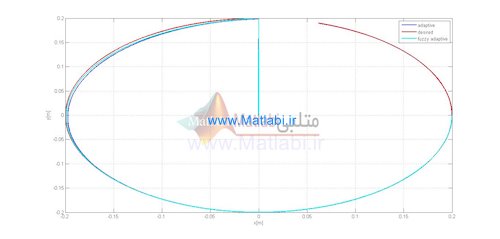
هم سیستم کنترلی مقاله و هم سیستم کنترلی با فازی شبیه سازی شده
فایل های شبیه سازی با متلب تهیه شده به شرح زیر است:
1- فایل Main.m که فایل اصلی بوده و با اجرای آن نتایج شبیه سازی بر روی نمودارهایی ترسیم میشوند.
2- فایل CableRobotModel.m که مدل ربات را پیادهسازی می کند.
3- فایل Controller.m که سیستم کنترل مقاله را پیاده سازی می کند.
4- فایل ControllerFuzzy.m که سیستم کنترل مقاله به همراه بخش فازی را پیاده سازی می کند.
5- فایل سیمولینک CableRobotControl_P1.mdl سناریوی اول شبیه سازی مقاله را پیاده سازی می کند.
6- فایل سیمولینک CableRobotControl_P2.mdl سناریوی دوم شبیه سازی مقاله را پیاده سازی می کند.
7- فایل سیمولینک CableRobotControl_P1_Fuzzy.mdl سناریوی اول شبیه سازی مقاله را با کنترلر اصلاح شده به روش فازی پیاده سازی می کند.
8- فایل سیمولینک CableRobotControl_P2_Fuzzy.mdl سناریوی دوم شبیه سازی مقاله را با کنترلر اصلاح شده به روش فازی پیاده سازی می کند.
9- فایل های K1Tune.fis, K2Tune.fis و K3Tune.fis سیستم های فازی تعیین کننده ضرایب k1, k2 و k3 را پیاده سازی می کنند.
فایل ها در نرم افزار متلب 2011b آماده شده اند.
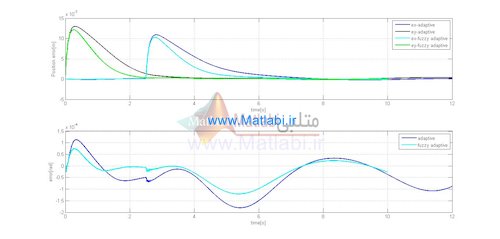
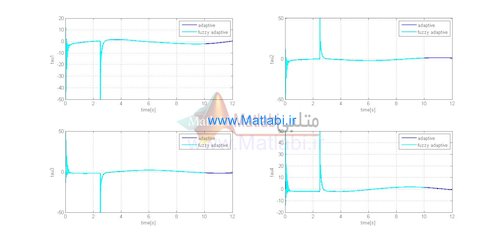
توجه شود در مقاله شما بسیاری از پارامترها و همچنین ماتریس ژاکوبین J داده نشده است. به همین دلیل پارامترهای مجهول به طور اختیاری مقدار دهی شده و ماتریس ژاکوبین با توجه به ساختار ربات تعیین شده است. تفاوت جزئی در برخی از شکل ها بدلیل همین نقص های اطلاعاتی است. به هر حال روش ها کاملا جواب داده و نتایج مشابه مقاله را ایجاد می کند.
نتایج بدست آمده از شبیه سازی با متلب:

کلید واژه:
Cable-driven parallel robots , Elastic cables , Unstructured and parametric uncertainties , Singular perturbation , Composite control , Adaptive robust control
شبیه سازی مقاله
Adaptive robust control of fully constrained cable robots: singular perturbation approach
طبق توضیحات فوق توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.