توضیحات
LQG CONTROLLER FOR ENHANCEMET POWER SYSTEM OPERATION
این مقاله به بررسی 3 روش کنترل خطا و بردار حالت در مدلسازی ماشین سنکرون متصل به شبکه باس بینهایت پرداخته و دو مدل ماشین سنکرون مرتبه سوم خطی شده و مدل ماشین متصل به شبکه پرداخته است.
معادلات فرم اول بصورت زیر است:
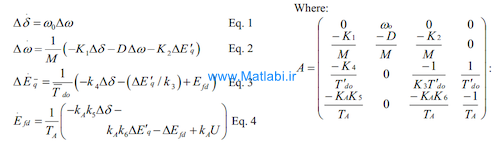
و معادلات دیفرانسیل فرم دوم متصل به شبکه بینهایت بصورت زیر است:

و در نتیجه سیستم کنترل مرتبه 4 و مرتبه 6 برای فرم اول و فرم دوم است و سه کنترل LQR و KALMAN و LQG به سیستم اعمال کرده تا خطای متغیرهای حالت به ازای ورودی کمینه گردد و در ادامه نتایج دو فرم قرار دادیم.
برای شبیه سازی و تفکیک نتایج دو ام فایل قرار دادیم که هر کدام مربوط به یک فرم است و پارامترهای ورودی برنامه دیتای ژنراتور و دیتای راکتانس و نقطه کار ژنراتور در شبکه ( P,Q ) است.
بمنظور بررسی نتایج کنترل کننده ها لازم است مقدار اولیه متغیرهای حالت تعیین کرده و برای مثال کد زیر مقدار اولیه برای متغیر زاویه روتور غیرصقر تعیین کرد:
%% Plot Setting
time=0:0.01:10;% simulation time
x0=[1 0 0 0]; % Initial State Value
و نقطه کار ماشین توسط کد زیر تعیین میشود .
%% Operating Point
P=1;
Q=0.25;
VB=1;
و در ادامه نتایج شبیه سازی برای هر فرم گذاشته میشود.
لازم بذکر است که برخی پارامترهای شبکه در مقاله موجود است و برخی موجود نیست و پارامترهای تست جایگزین شده است.
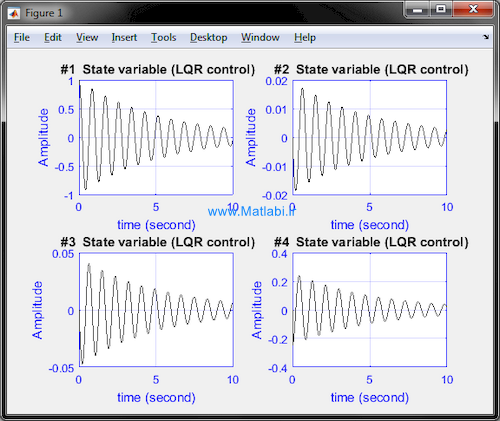
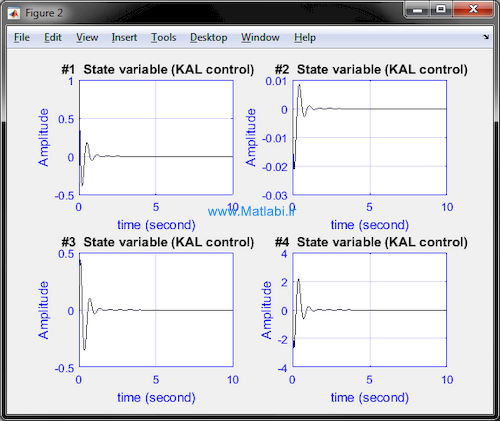
 اچرای ام فایل فرم اول برای نقطه کار P=1 و Q=0.25
اچرای ام فایل فرم اول برای نقطه کار P=1 و Q=0.25
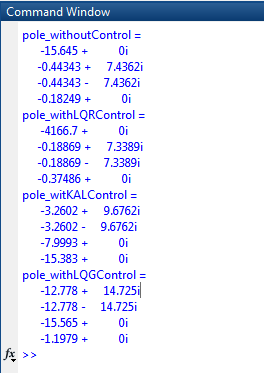
مکان هندسی قطبهای سیستم حالت با روش های متعدد
و نمودار تغییر متغیرهای حالت به ازای مقدا اولیه XO برای روشهای کنترلی

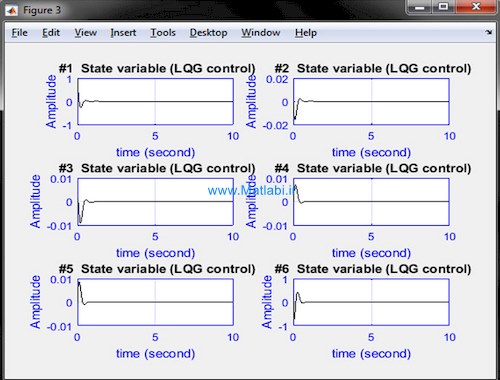
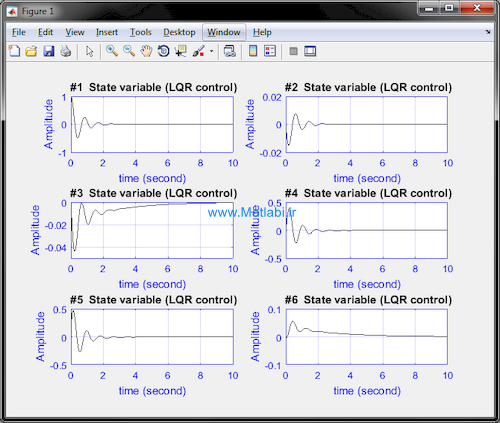
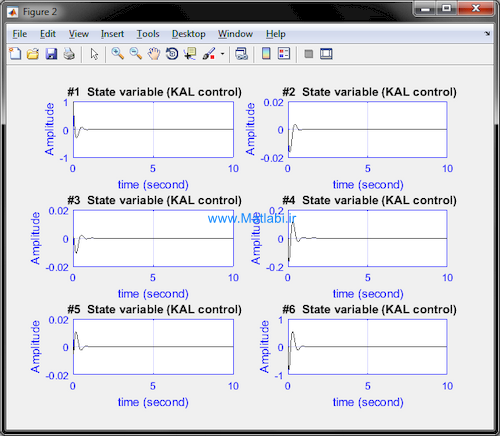
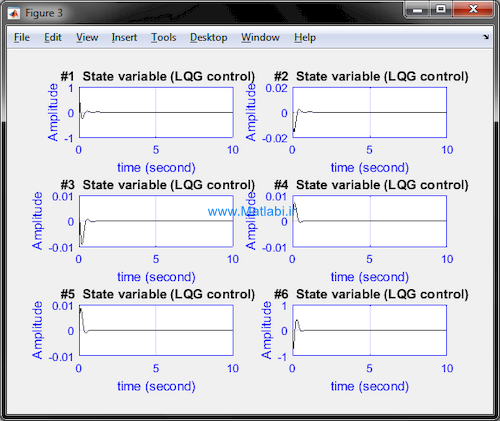
اچرای ام فایل فرم دوم برای نقطه کار P=1 و Q=0.25 ( خالت متصل به شبکه بینهایت )
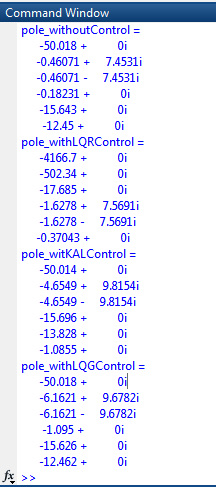 مکان هندسی قطبهای سیستم حالت
مکان هندسی قطبهای سیستم حالت
و نمودار تغییر متغیرهای حالت به ازای مقدا اولیه XO برای روشهای کنترلی
این پروژه در متلب 2016 تست و اجرا شده است.
کلید واژه :
Power System Stabilization, Advanced Controller, Robust Systems Control, LQR, LQG
شبیه سازی مقاله
LQG CONTROLLER FOR ENHANCEMET POWER SYSTEM OPERATION
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.