توضیحات
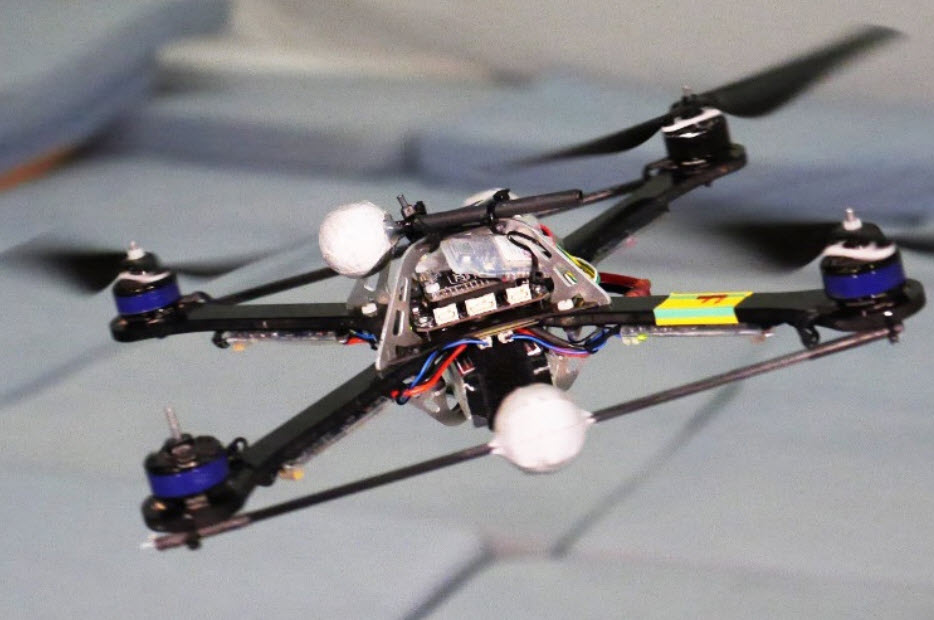
Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers
با استفاده از کنترل کننده مدلغزشی و مقاوم انجام شده
بجای LQR از کنترل مقاوم مدلغزشی استفاده شده
مدل دینامیکی سیستم کوادروتور با توجه به آزادی حرکت در فضا ، دارای 3 مختصه موقعیت بصورت بردار
![]()
![]()
می باشد. همچنین هر سیستم پرنده ، برای افزایش قابلیت های پروازی دارای 3 مختصه موقعیت دورانی بصورت
![]()
![]()
![]() می باشد، که در آن ، زاویه غلتش، ، زاویه اوج و زاویه انحراف کوادروتور می باشد.
می باشد، که در آن ، زاویه غلتش، ، زاویه اوج و زاویه انحراف کوادروتور می باشد.
بنابراین کوادروتور دارای 6 درجه آزادی می باشد . که بر مبنای تغیرات آن 6 مولفه سرعت خطی و دورانی نیز تعریف می گردد. بنابراین با توجه به وجود 12 متغیر حالت موجود در مساله ، دینامیک سیستم بر مبنای معادلات فوق به فرم زیر نحوه رفتار سیستم را بیان می دارند:
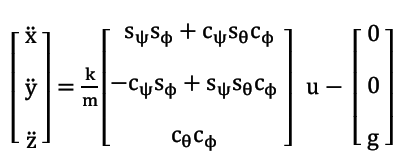

که بیانگر معادله دینامیکی رفتار خطی کوادروتور در فضا می باشند، و معادله زیر
بر مبنای مدل موجود ، با استفاده از روش مقاله به طراحی کنترل کننده مقاوم نسبت به فالت موتور می پردازیم، که طراحی این کنترل کننده بروش مدلغزشی صورت پذیرفته است.
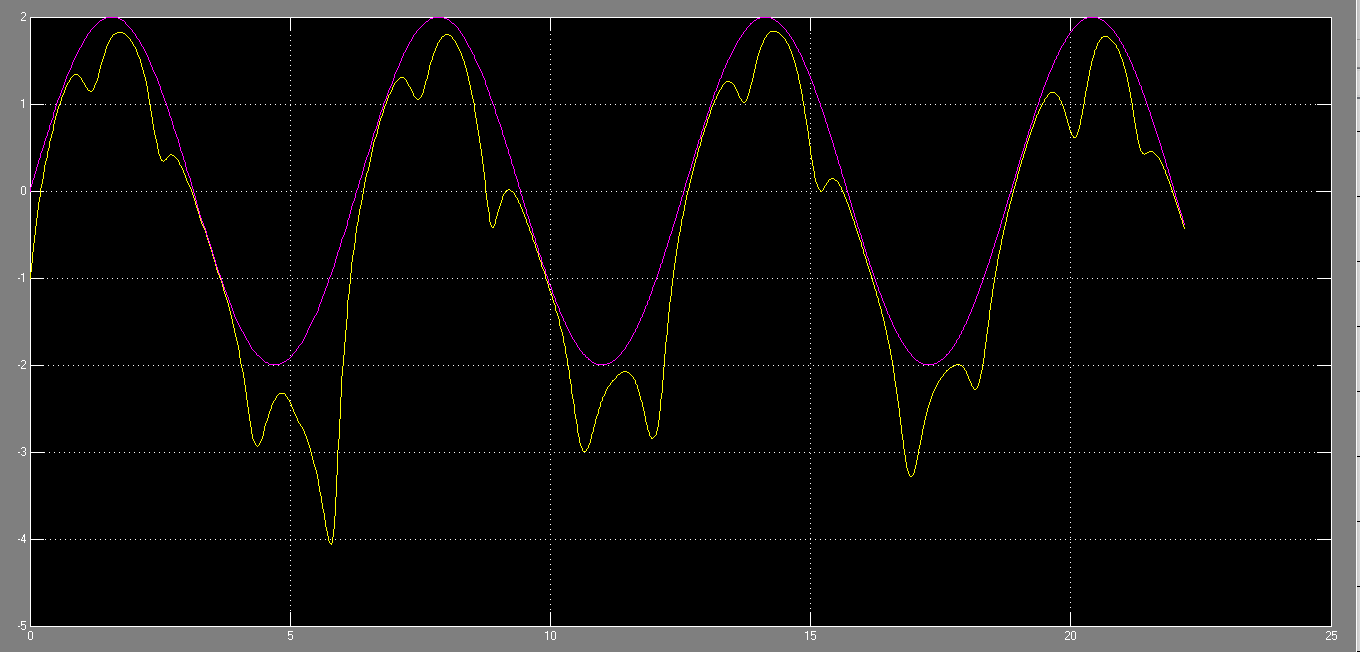
هدف از طراحی کنترل کننده فوق ، ردیابی خروجی های مرجع مربوط به 4 متغیر کنترل زیر در حضور فالت و از دست رفتن یکی از موتورهاست، که در شبیه سازی سیگنال ، Tsay را بعنوان از دست رفتن یکی از ورودی ها در نظر گرفته ایم:
سیگنال خروجی ارتفاع کوادروتور و ردیابی مرجع تحت کنترل
سیگنال خروجی زاویه دوران و ردیابی مرجع تحت کنترل

سیگنال خروجی زاویه اوج و ردیابی مرجع تحت کنترل

کلید واژه : کنترل تطبیقی
Propellers, Vehicles, Attitude control, IP networks, Force, Torque, Angular velocity
شبیه سازی مقاله
Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers
توسط کارشناسان سایت متلبی تهیه شده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.