توضیحات
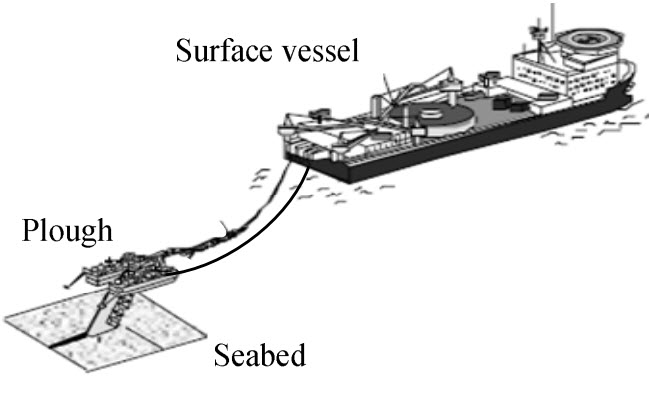
Robust Adaptive Dynamic Surface Path Tracking Control for Dynamic Positioning Vessel with Big Plough
فایل های شبیه سازی با متلب به شرح زیر تهیه شده است:
- فایل Main.m که فایل اصلی بوده و با اجرای آن سایر فایل ها به طور خودکار اجرا شده و نتایج بر روی نمودارهایی ترسیم می شوند.
- فایل RAC.m که کنترل کننده پیشنهادی مقاله را پیاده سازی می کند.
- فایل RefTraj.m که مسیر مرجع را تولید می کند.
- فایل ShipModel.m که مدل کشتی را پیاده سازی می کند.
- فایل سیمولینک RobustAdaptiveVessel.mdl که سیستم کنترل حلقه بسته را در محیط سیمولینک پیاده سازی می کند.
فایل ها در نرم افزار متلب نسخه 2011b آماده شده اند و برای اجرا بهتر است از نسخه های نزدیک به آن استفاده شود.
فیلم آموزش اجرای برنامه متلب نیز همراه با برنامه وجود دارد.
کد های متلب در گزارش کار توضیح داده شده اند.
تشریح فایل سیمولینک متلب
نمای این فایل در شکل زیر نشان داده شد است. دینامیک سیستم در بلوک زرد, کنترل کننده در بلوک آبی و مسیر مرجع توسط بلوک سبز تولید می شود.
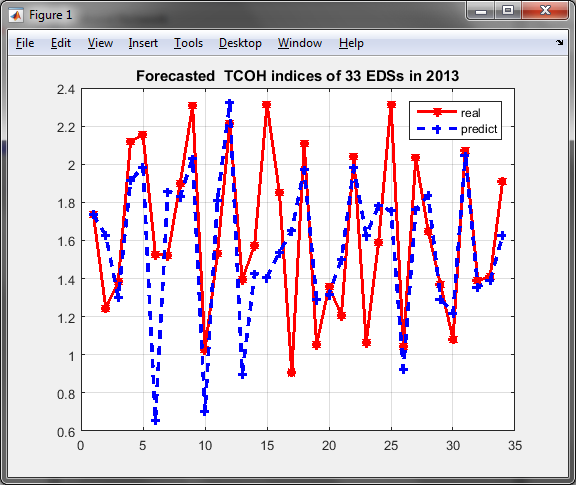
با اجرای فایل Main.m شکل های زیر تولید خواهد شد.

برخی از پارامترها را مقاله نداده که از مقاله دیگری به عنوان مقاله کمکی استفاده شده است
کلید واژه :
Fully actuated dynamic positioning vessel. Robust adaptive dynamic surface. Tracking control. Large disturbances
شبیه سازی مقاله
Robust Adaptive Dynamic Surface Path Tracking Control for Dynamic Positioning Vessel with Big Plough
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





