
توضیحات
کنترل مرزی یک رایزر انعطاف پذیر با کاربرد در نصب دریایی
عنوان اصلی مقاله
Boundary Control of a Flexible Riser With the Application to Marine Installation
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 9 صفحه ای می باشد.
توضیحات پروژه کنترل فعال ارتعاشات رایزرهای دریایی
در پوشه simulation که دریافت می کنید, سه پوشه قرار دارد به صورت زیر:
پوشه شماره 1: سيستم بدون كنترل
پوشه شماره 2: سيستم با كنترل معلوم
پوشه شماره 3: سيستم با كنترل نامعلوم
نام تمام فايل هاي داخل اين سه پوشه يكي است و تنها تفاوت اين فايل ها در خطوط مربوط به كنترلر ميباشد.
براي همين، در گزارش این شبيه سازي, سيستم بدون كنترل را توضيح داده شده و سپس به خطوطي در شبيه سازي هاي ديگر پرداخته شده كه تفاوت دارند.
نكته مهم در مورد شبيه سازي:
معادلات اين مقاله از نوع Partial Differential Equations (PDE) هستند. متلب داراي جعبه ابزار مخصوص براي حل اين معادلات است. ولي معادلاتي كه مي توان با اين جعبه ابزار حل نمود داراي حالت مشخصي هستند و بنابراين نمي توان انواع معادلات PDE از جمله معادلات داخل اين مقاله را با آن حل نمود. در نتيجه براي شبيه سازي از روشي ديگر كه در ادامه توضيح داده مي شود استفاده مي گردد.
صفحه زمان-مكان زير را در نظر مي گيريم. طبق توضيحات مقاله، مقدار y (خروجي سيستم) در تمام ضلع سمت چپ اين صفحه (t = 0) صفر است. همچنين براي ضلعهاي x = 0 و x = L (حدود پايين و بالاي مكاني) مي توان پاسخ y را با حل قيود داده شده در معادلات 10 تا 13 و با فرض صفر بودن مشتقات مكاني (زيرا مكان در هر دو ضلع ثابت است)، به دست آورد (در اين جا با معادلات ديفرانسيل معمولي ODE سر و كار داريم چون مكان ثابت است و فقط زمان تغيير مي كند). پس تا اينجا پاسخ y را در سه ضلع داريم. اكنون ميتوان پاسخ y را در تمام گام هاي زماني (زمان ثابت و مكان متغير) با استفاده از معادله … و قيود مربوطه که در گزارش ذکر شده, به صورت يك مساله با شرايط مرزي ابتدايي و انتهايي (Double Boundary Value Problem) حل نمود و پاسخ y در تمام صفحه را به دست آورد. در اين جا هم معادلات به ODE تبديل مي شوند زيرا زمان ثابت شده و فقط مكان تغيير مي كند.

صفحه زمان-مكان
اكنون با اين نكته، به توضيحات شبيه سازي ميپردازيم.
فايل main
تمام شبيه سازي ها با اين فايل اجرا مي شوند. و در نهایت نتایج ظاهر خواهد شد. این ام فایل در گزارش ورد توضیح داده شده است.
فايل systemEqX0
در اینجا همه توضیحات این ام فایل نیامده و برای دریافت آن بایستی اقدام شود.
خطوط 14 و 15: معادلات سیستم برای مرز x = 0.
فایل systemEqXL
خطوط 13 و 14: معادلات سیستم برای مرز x = L.
فایل systemEqXL
در این فایل، معادلات در هر گام زمانی و در راستای محور x حل می شوند. برای حل مساله به روش گفته شده، نیاز به سه تابع داریم.
خطوط 2 تا 27: فرآیند فراخوانی این سه تابع و حل معادلات در تمام گام های زمانی در این خطوط صورت گرفته است.
تفاوت های شبیه سازی دوم (فایل systemEqX0)
خطوط 7 و 8: ورودی کنترلی اول برای سیستم معلوم.
تفاوت های شبیه سازی دوم (فایل systemEqXL)
خطوط 7 تا 11: معادلات مربوط به ورودی کنترلی دوم.
تفاوت های شبیه سازی دوم (فایل systemEqX)
در خطوط 59 و 60 معادلات ورودی کنترلی اول و در خطوط 62 تا 66 معادلات ورودی کنترلی دوم با در نظر گرفتن مشتقات زمانی و مکانی به صورت کامل آورده شده اند.
تفاوت های شبیه سازی سوم (فایل systemEqX0)
خطوط 7 و 8: معادلات ورودی کنترلی اول.
تفاوت های شبیه سازی سوم (فایل systemEqXL)
خطوط 8 تا 11: معادلات ورودی کنترلی دوم.
تفاوت های شبیه سازی سوم (فایل systemEqX)
خطوط 59 و 60: ورودی کنترلی اول.
خطوط 62 تا 66: معادلات ورودی کنترلی دوم.
در ادامه به توضیح نتایج می پردازیم.
نتایج شبیه سازی با متلب
نمودار سیستم بدون کنترل
در این جا فقط نمودار مش سه بعدی را داریم. ملاحظه می شود که نمودار شباهت زیادی به مقاله دارد و حدود محور y با دقت زیادی رعایت شده است.

Fig. 2. Position of the riser without control
نتایج (x-y-t)
نتایج مش سه بعدی برای کنترل معلوم (شکل بالا) و کنترل نامعلوم (شکل پایین) آورده شده است. بهبود نتایج در شکل پایین کاملا مشخص است. ملاحظه می شود که نوسانات سیستم خیلی سریع تر از بین رفته است.
نمودار ورودی های کنترلی
حدود ورودی های کنترلی در هر دو سری، نزدیک به مقاله است. البته در ظاهر ورودی کنترلی اول قدری تفاوت با مقاله دیده می شود ولی کلیت آن با مقاله یکی است و ملاحظه گردید که به ازای این ورودی ها، خروجی y خیلی نزدیک و شبیه به مقاله به دست آمد. بهبود پاسخ ها در شکل پایین که برای کنترل نامعلوم است واضح می باشد.
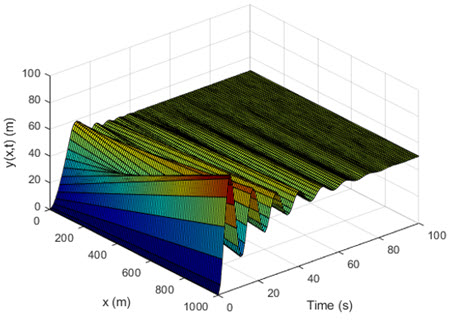
Fig. 3. Position of the riser with model-based boundary control.

Fig. 5. Position of the riser with adaptive boundary control.
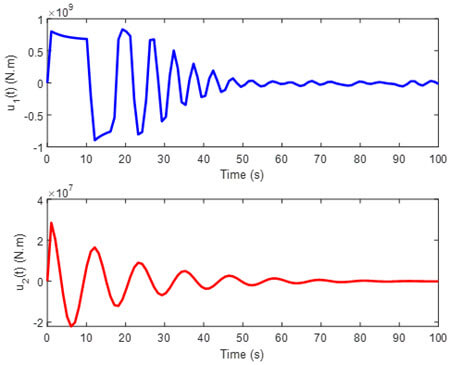 Fig. 4. Model-based boundary control inputs.
Fig. 4. Model-based boundary control inputs.

Fig. 6. Adaptive boundary control inputs.
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل مقاوم تحمل پذیر خطای ارتقا یافته مبتنی بر کنترل مود لغزشی تطبیقی فازی PID با همگرایی سریع برای سیستم های غیرخطی شامل عدم قطعیت
- کنترل تحمل پذیر خطای فعال مبتنی بر مشاهده گر مودلغزشی برای مشارکت پهپادها
- تشخیص محل دقیق خطا در خطوط انتقال با الگوریتم مورچگان با استفاده از متلب
- حمل و نقل بار مشارکتی با دو کوادروتور با استفاده از کنترل تطبیقی
کلیدواژه:
Adaptive control, boundary control, distributed parameter system, flexible riser, partial differential equation
کنترل تطبیقی, کنترل مرزی, سیستم پارامترهای توزیع شده, رایزر انعطاف پذیر, معادله دیفرانسیل جزئی
کنترل مرزی یک رایزر انعطاف پذیر با کاربرد در نصب دریایی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.