توضیحات
کنترل مودلغزشی سیستم های جرثقیل دو پاندولی
عنوان اصلی مقاله
Sliding mode controls of double-pendulum crane systems
شبیه سازی در محیط ام فایل متلب انجام شده است.
گزارش 9 صفحه ای در قالب ورد است.
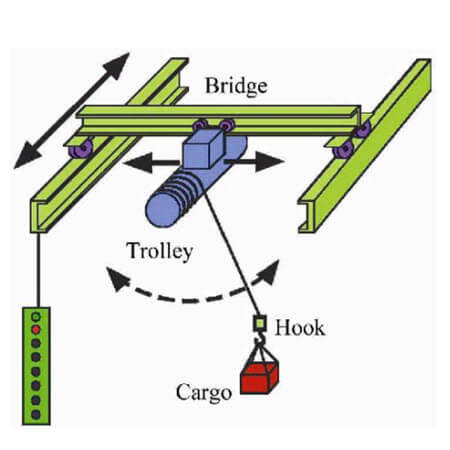
این مقاله درباره طراحی کنترل کنندههای غیرخطی مقاوم بر اساس تکنیکهای مودلغزشی و سلسله مراتبی برای سیستمهای جرثقیل دو آونگی (جرثقیل سقفی) است.
توضیحات پروژه کنترل مودلغزشی
در این مقاله دو نوع کنترل مود لغزشی استفاده شده و شبیه سازی شده است.
در پوشه simulation که مربوط به شبیه سازی مقاله است, دو پوشه دیگر وجود دارد:
پوشه 1. Without uncertainty که مربوط به شبیه سازی بدون عدم قطعیت است.
پوشه 2. With uncertainty که مربوط به شبیه سازی با عدم قطعیت است.
فایل main: هز شبیه سازی با اجرای فایل main انجام می شود. در این فایل ثابت های موجود در مقاله آورده شده و سپس فایل های شامل معادلات سیستم فراخوانی شده و معادلات با روش عددی ode45 حل گردیده و در انتها هم نمودارها رسم میشوند.
فایل CSMC_equations: این فایل شامل معادلات مربوط به کنترلر CSMC است.
فایل HSMC_equations: نکته مهم: کنترلر HSMC تعریف شده در مقاله ایرادات زیادی دارد. بنابراین از مرجع معرفی شده در همین مقاله (مرجع شماره 25) که در پوشه paper همراهِ پروژه, مقاله آن قرار داده شده است، این کنترلر بازطراحی شده است و نتایج نزدیک به مقاله به دست آمده است.
تمام این موارد در فایل HSMC_equations.m آورده شده است.
نکته: در مقالات معمولا از تابع sign استفاده می شود. اگر از تابع tanh به جای sign استفاده شود سرعت بسیار بالا می رود و سیستم پیوسته تر می شود. تابع tanh همان رفتار sign را دارد ولی در حالت پیوسته.
توضیحات مربوط به شبیه سازی در گزارش ورد پروژه آمده است که با خرید این محصول قابل دریافت است.
نتایج شبیه سازی با متلب
ابتدا نتایج حالت بدون عدم قطعیت را بررسی می کنیم:
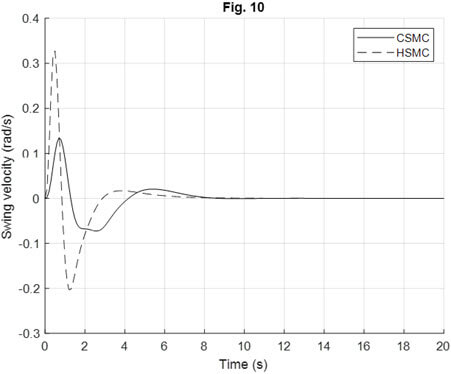
Fig. 10. Swing velocity of cargo.
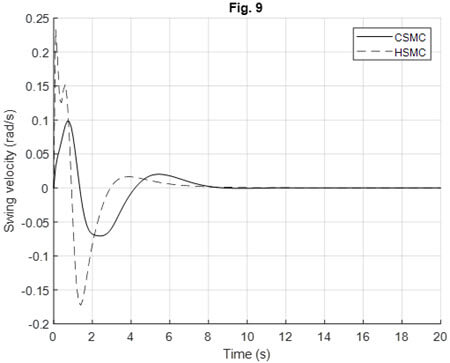
Fig. 9. Swing velocity of hook.
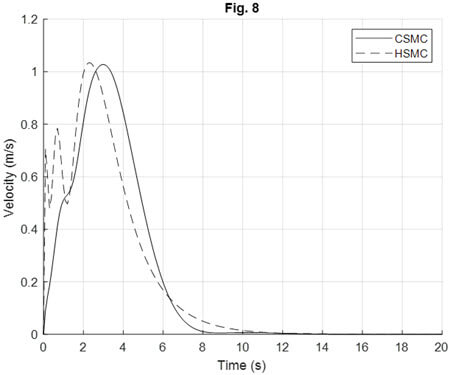
Fig. 8. Trolley velocity
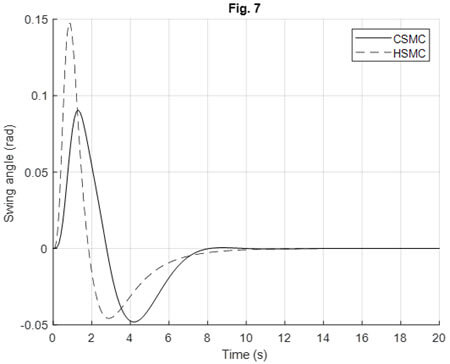
Fig. 7. Swing angle of cargo.

Fig. 6. Swing angle of hook
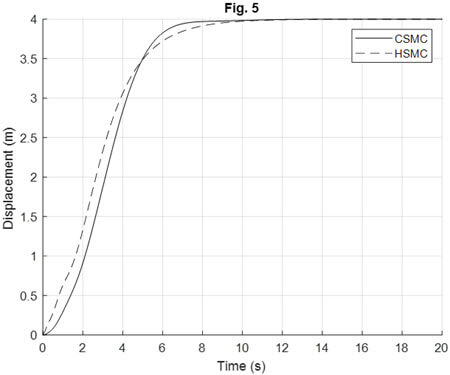
Fig. 5. Trolley displacement
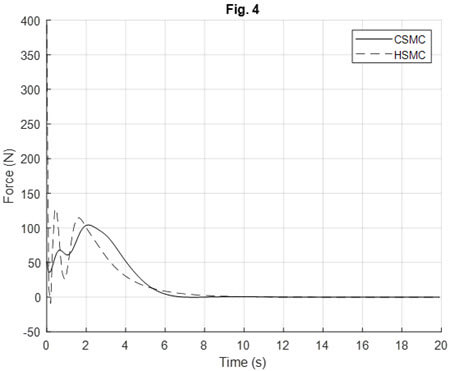
Fig. 4. Trolley driving force.

Fig. 3. (a) Sliding surfaces of HSMC; (b) The enlarged view of Fig. 3(a)
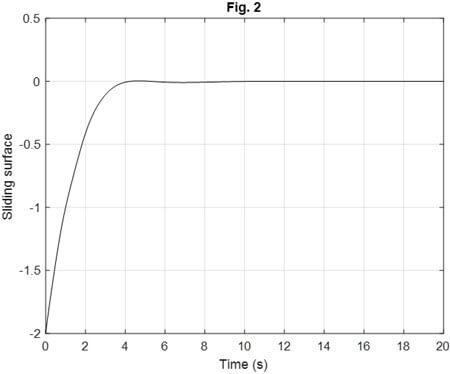
Fig. 2. Sliding surface of CSMC.
نتایج مربوط به عدم قطعیت ها نیز حالت مشابهی دارند.
شاید علاقه مند به موارد زیر باشید:
- کنترل تحمل پذیر خطای فعال مبتنی بر مشاهده گر مودلغزشی برای مشارکت پهپادها
- یک رویکرد مودلغزشی برای افزایش کیفیت توان توربینهای بادی در شرایط ولتاژ نامتعادل
- کنترل مود لغزشی بهینه برای جلوگیری از برخورد فضاپیما با متلب
- کنترل مود لغزشی مرتبه کسری برای کنترل وضعیت ماهوارهای اسمی و کم کار
- سیستم ساختمان یکپارچه فتوولتائیک متصل به شبکه سه فاز با قابلیت کنترل توان راکتیو
کلیدواژه:
Lyapunov function, Overhead crane, Sliding mode control, Switching surface
عملکرد لیاپانوف, جرثقیل سقفی, کنترل مودلغزشی, سطح سوئیچینگ
کنترل مودلغزشی سیستم های جرثقیل دو آونگی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.