توضیحات
طراحی هدایت میانی موشک برای زاویه برخورد محدود
عنوان اصلی مقاله:
Design of Missile Mid-Course Guidance for Constrained Impact Angle
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 5 صفحه ای در قالب ورد است.
توضیحات پروژه طراحی هدایت میانی موشک
شبیه سازی از دو ام فایل تشکیل شده است, که در زیر بخش هایی از توضیحات در مورد این دو ام فایل جهت پیش نمایش خرید, قرار داده شده است:
فایل main
شبیه سازی با این فایل اجرا می شود.
خطوط 11 تا 15: تعدادی متغیر ثابت که در مقاله آورده شده است تعریف شده اند.
خط 18: این شبیه سازی طبق مقاله، شامل 4 حالت مختلف است. در نتیجه یک متغیر به نام k تعریف شده است که در هنگام اجرای هر حالت، یک واحد افزایش می یابد و در واقع شمارنده تعداد حالت ها است.
خط 19: یک حلقه for آغاز می شود که 4 بار به شکل زیر اجرا می گردد:
حالت 1: کنترل LQR با آپدیت پارامترها و نرخ به روزرسانی 1 بار
حالت 2: کنترل LQR با آپدیت پارامترها و نرخ به روزرسانی 30 بار
حالت 3: کنترل LQR با آپدیت پارامترها و نرخ به روزرسانی 2 کیلوهرتز
حالت 4: کنترل LQR بدون آپدیت پارامتر
بخشی از گزارش در اینجا نیامده است.
خط 33: فاصله اولیه بین دو موشک
خط 34: متغیرهای حالت اولیه برای قرارگیری در کنترلر LQR
خطوط 38 تا 42 و 47 تا 52: برای 3 حالت اول متغیرها آپدیت می شود ولی برای حالت 4، آپدیت پارامتر نداریم. دقت کنید که مقاله هیچ توضیحی در زمینه آپدیت پارامترها نداده است و بنابراین یک به روزرسانی فرضی قرار داده ایم تا نتایج تا جای ممکن به مقاله نزدیک شوند. این قانون به این صورت است که در هر گام arctan((ym-yt)/(xm-xt)) از زاویه قبلی کم می گردد.
در اینجا فقط بخشی از توضیحات آورده شده است.
خطوط 98 تا 108: ذخیره متغیرهای شبیه سازی و آماده سازی برای رسم.
خطوط 112 تا انتها: رسم نمودارها.
فایل guidanceEquation
معادلات مربوط به هدایت Terminal در این قسمت آورده شده است.
نتایج شبیه سازی با متلب
با اجرای فایل main نتایج زیر را خواهیم داشت. شماره هر شکل در بالای هر نمودار آورده شده است. ملاحظه می شود که نتایج بسیار به مقاله نزدیک هستند. البته تفاوت هایی مشاهده می شود که به دلیل عدم توضیحات کافی مقاله است. این مقاله، کنفرانسی می باشد و مقالات کنفرانس، معمولا توضیحات اندکی را در خود دارند.
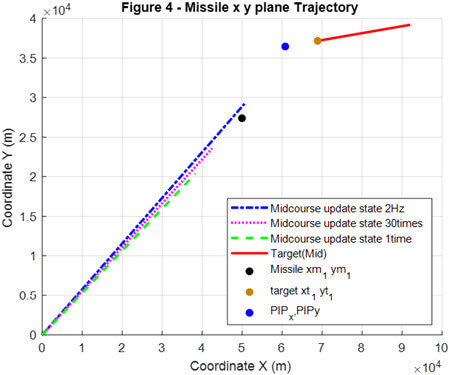
Figure 4. Missile trajectory under various update frequencies. The updates of the missile dynamics and target position are performed for once, 30 times, and every 2 Hz during the entire guidance period.

Figure 5. Missile trajectory when adapting different linearization processes of the guidance law.
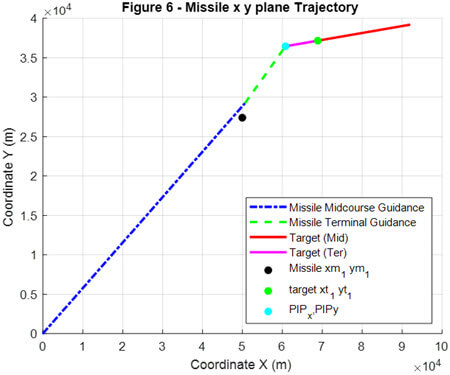
Figure 6. Flight trajectory of interception missile and target missile under
proposed mid-course and terminal guidance
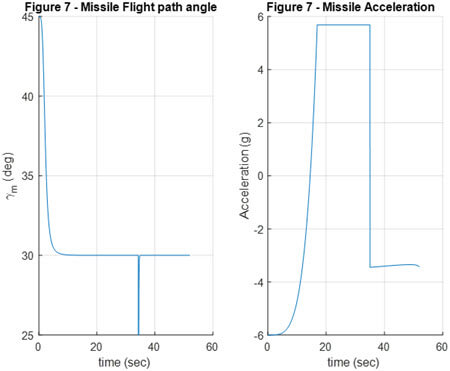
Figure 7. Flight path angle and the acceleration command of the interception missile.
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل مود لغزشی بهینه برای جلوگیری از برخورد فضاپیما با متلب
- طراحی سیستم کنترل موشک با استفاده از کنترل کننده PD همراه با فیلتر پایین گذر مرتبه دوم با تقریب باترورث
- طراحی اتوپایلوت گام مقاوم مبتنی بر مشاهده گر حالت پیشرفته برای موشک های تاکتیکی
- طراحی اتوپایلوت موشک BTT با کنترل پیش بین تعمیم یافته(GPC)
- هدایت و کنترل یکپارچه برای موشکهای آشیانه یاب با محدودیت زاویهای پایانه در فضای سهبعدی
کلیدواژه:
کنترلر LQR,زاویه برخورد محدود ,هدایت میانی ,هدایت ترمینال,طراحی هدایت موشک
طراحی هدایت میانی موشک برای زاویه برخورد محدود با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.