
توضیحات
کنترل مود لغزشی مقاوم در برابر خطا برای پهپاد کوادروتور با فیدبک تاخیری
عنوان اصلی مقاله:
Fault-Tolerant Sliding Mode Control of a Quadrotor UAV With Delayed Feedback
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 3 صفحه ای می باشد.
ترجمه چکیده مقاله:
یک کنترلکننده پهپاد (UAV) فرمانهای پیچ، رول و انحراف را به تک تک ملخها توزیع میکند.
این مقاله به بررسی کنترل تحملپذیر خطای یک پهپاد کوادروتور با استفاده از فیدبک تاخیری و کنترل فیدبک حالت تقسیمشده (DSFC) میپردازد.
در ابتدا، یک کنترلر مودلغزشی (SMC) برای پهپاد کوادروتور برای به دست آوردن عملکرد پایدار در حضور خطاهای محرک طراحی شده است.
عملکرد SMC به طور قابل توجهی در حضور فیدبک حسی تاخیری از پهپاد بدتر می شود.
سپس یک DSFC برای بازیابی اثربخشی کنترل کننده دستگاه استفاده می شود. ساختار کنترل پیشنهادی تثبیت، مقاوم بودن و پاسخ گذرا را در حضور خطاهای محرک ارائه می دهد. شبیه سازی های کامپیوتری برای نشان دادن اثربخشی طرح کنترل ترکیبی ما ارائه شده است.
توضیحات پروژه کنترل مودلغزشی مقاوم در برابر خطا
شبیه سازی شامل یک ام فایل است که با اجرای آن به نتایج انتهای همین صفحه خواهید رسید. گزارش ورد نیز شامل توضیحات در مورد کدهای برنامه و نمایش نتایج بدست آمده است. نمونه ای از نحوه توضیحات برنامه را در زیر قرار داده ایم:
خطوط 7 تا 15: ثابت های مساله (مقاله به این مقادیر هیچ اشاره ای نکرده و بنابراین مقادیر تقریبی قرار دادم).
خطوط 18 و 19: زمان شبیه سازی.
خطوط 22 تا 24: ثابت های کنترلر.
خط 27: تاخیرهای زمانی.
خط 29: آغاز مساله کنترل بدون تاخیر.
خطوط 35 تا 44: مقادیر سیگنال های مرجع به همراه مشتقات مرتبه اول و دوم آن ها.
خطوط 47 تا 53: خطاهای تعقیب.
خطوط 56 تا 61: محاسبه سطوح لغزش کنترل مود لغزشی
در اینجا فقط نمونه کوچکی از توضیحات مربوط به شبیه سازی را که در گزارش کار آمده است را قرار دادیم. برای دریافت فایل کامل, شامل مقاله, شبیه سازی با متلب و گزارش ورد بایستی این محصول خریداری شود.
نتایج بدست آمده از شبیه سازی با متلب
با اجرای شبیه سازی نتایج زیر ظاهر می شود. ملاحظه می شود که رفتار کلی نمودارها و نیز بازه تغییراتشان بسیار نزدیک به مقاله است. البته تفاوت های بسیار جزئی وجود دارد که به دلیل اطلاعات کم مقاله می باشد.

Figure 4. Comparison of DSF Control with Passive FTC based on SMC:
(a) Roll Angle; (b) Pitch Angle; (c) X-Displacement; (d) YDisplacement
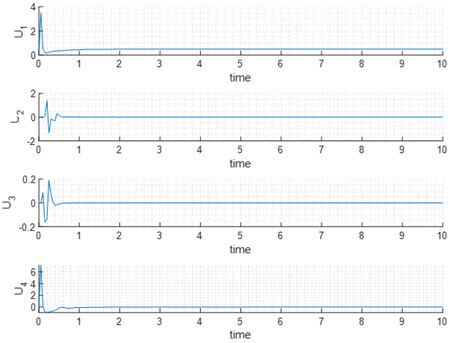
Figure 5. (a) Control Effort U1; (b) Control Effort U2; (c) Control Effort U3; (d) Control Effort U4
شاید به موارد زیر نیز علاقه مند باشید:
- مدلسازی و کنترل تطبیقی کوادروتور
- کنترل مشارکتی بهینه داده محور برای تیم کوادروتور با داینامیک ناشناخته
- حمل و نقل بار مشارکتی با دو کوادروتور با استفاده از کنترل تطبیقی
- کنترل سرعت موتور DC به همراه دست یابی به زمان نشست کوتاه در پاسخ سیستم
- کنترل تحمل پذیر خطا/خسارت یک وسیله نقلیه هوایی بدون سرنشین هلیکوپتر کوادروتور با استفاده از کنترل تطبیقی مدل مرجع و PID زمانبندی شده
- Sensor fault detection and isolation for a class of uncertain nonlinear system using sliding mode observers
کلیدواژه:
کنترل بازخورد حالت تقسیم شده, کنترل حالت لغزشی (SMC), خطاهای محرک, پهپاد کوادروتور, کنترل تحمل خطا (FTC), تاخیرهای زمانی
Divided State Feedback Control, Sliding Mode Control (SMC), Actuator Faults, Quadrotor UAV, Fault Tolerant Control (FTC), Time Delays
کنترل مود لغزشی مقاوم در برابر خطا برای پهپاد کوادروتور با فیدبک تاخیری با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.