
توضیحات
کنترل تحمل پذیر خطا فعال مبتی بر مشاهده گر مودلغزشی برای مشارکت پهپادها
عنوان اصلی مقاله:
Sliding mode observer-based active fault tolerant control for UAVs formation
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده است. (شبیه سازی با متلب 2016b انجام شده است. با متلب 2023 نیز تست و اجرا شده است.)
دارای گزارش مختصر ورد 8 صفحه ای می باشد.
ترجمه چکیده مقاله:
یک کنترل کننده فعال متحمل خطا برای مشارکت وسایل نقلیه هوایی بدون سرنشین(پهپادها) (UAVs) در حضور خطای محرک در این مقاله توسعه داده شده است.
اول، یک کنترل کننده حلقه بیرونی برای اطمینان از پایداری کل پایداری مشارکت پهپاد طراحی شده است، و یک کنترل کننده حلقه داخلی برای ردیابی سیگنال حلقه بیرونی مورد نظر طراحی شده است.
با توجه به وقوع خطای محرک، یک کنترل کننده متحمل خطا فعال بر اساس کنترل کننده اسمی ایجاد می شود تا تأثیر خطاهای محرک را از بین ببرد و پایداری سیستم مشارکتی پهپادها را تضمین کند.
یک مشاهده گر حالت لغزشی برای بازسازی حالت ها و خطاهای محرک استفاده می شود.
در نهایت، تأثیر خطاهای محرک بر روی سیستم مورد تجزیه و تحلیل قرار میگیرد و اعتبار روش توسط متلب اثبات میشود.
توضیحات پروژه کنترل تحمل پذیر خطای فعال بر ناظر مودلغزشی
شبیه سازی شامل 5 ام فایل و یک سیمولینک است, که ام فایل اصلی Main فقط برای اجرای کامل شبیه سازی کافی است و با اجرای آن, فایلهای دیگر خودکار فراخوانی و اجرا میشوند و نتایج در نهایت ظاهر خواهد شد.
در این شبیه هدف بدست آوردن نتایج شکل های 3,4 و 8 مقاله است. که در این پروژه این هدف محقق شده است.
برنامه اصلی به صورت گرافیکی در فایل سیمولینک SMFTC نوشته شده است که توسط تابع main.m فراخوانی و اجرا می شود. در ایجاد فایل سیمولینک SMFTC از بلوک های آماده و همچنین برخی بلوک های تابعی استفاده شده است.
در این پروژه یک لیدر و چهار فالوور داریم که مدل و سیستم کنترل هر کدام در بلوک مربوطه پیاده سازی شده است. لیدر دارای سیستم کنترل نیست و فقط دارای سرعت های مرجع v و w است.
گزارش ورد نیز شامل توضیحات در مورد شبیه سازی به صورتی است که برای هر بخش توضیح کلی داده شده است و اجزای شبیه سازی تشریح شده است.
در نهایت نتایج بدست آمده از شبیه سازی با متلب به صورت زیر است:
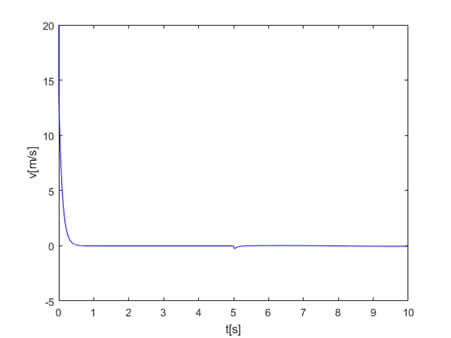
شکل 8. خطای سرعت رو به جلو با کنترل تحمل خطا
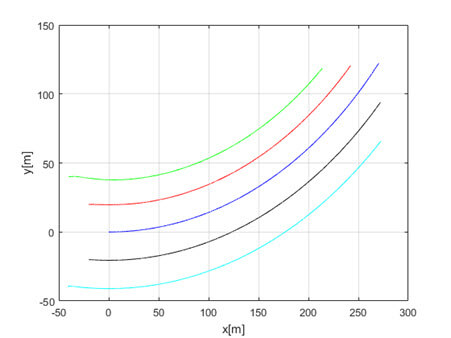
شکل 4. مسیر پرواز مشارکتی

شکل 3. خطای سرعت رو به جلو و خطای سرعت زاویه ای
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل مقاوم تحمل پذیر خطای ارتقا یافته مبتنی بر کنترل مود لغزشی تطبیقی فازی PID با همگرایی سریع برای سیستم های غیرخطی شامل عدم قطعیت
- کنترل تحمل پذیر خطا/خسارت یک وسیله نقلیه هوایی بدون سرنشین هلیکوپتر کوادروتور با استفاده از کنترل تطبیقی مدل مرجع و PID زمانبندی شده
- یک رویکرد مودلغزشی برای افزایش کیفیت توان توربینهای بادی در شرایط ولتاژ نامتعادل
- بهینه سازی تصادفی در بهره برداری از هاب انرژی با مشارکت منابع انرژی تجدیدپذیر و پاسخگویی به تقاضا
- طراحی بهینه توزیع هماهنگی مبتنی بر زیرشاخه ژنراتورهای تجدید پذیر چندگانه در میکرو شبکه
کلیدواژه:
UAVs formation, sliding mode observer, fault diagnosis, fault tolerant control
مشاهده گر حالت لغزشی, تشخیص خطا, کنترل تحمل خطا
کنترل تحمل پذیر خطا فعال مبتنی بر مشاهده گر مودلغزشی برای مشارکت پهپادها با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.