توضیحات
کنترل پیش بین مدل مبتنی بر استراتژی تضعیف میدان برای کشش خودرو الکتریکی مورد استفاده موتور القایی
عنوان اصلی مقاله:
Model Predictive Control based Field-weakening Strategy for Traction EV used Induction Motor
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده است.
دارای گزارش ورد 5 صفحه ای می باشد.
توضیحات پروژه کنترل پیش بین
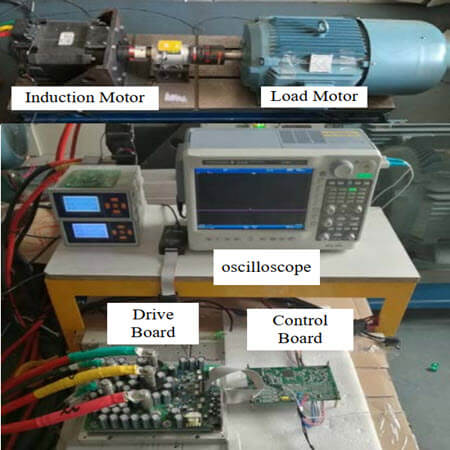
مقاله به صورت تجربی بوده مانند شکل 10 مقاله و از این رو شبیه سازی مشابه مدل مقاله تهیه شده است و پارامترهایی که در مقاله ذکر نشده به صورت فرضی قرار داده شده است.
فایلهای شبیه سازی به شرح زیر تهیه شده است:
۱- فایل main.m که فرایند طراحی کنترلر mpc را مطابق بخش MPC Based field-wakening control طراحی می کند و شکل ۹ مقاله را شبیه سازی می کند.
۲- فایل سیمولینک که سیستم تجربی مقاله را در محیط شبیه سازی به صورت تقریبی شبیه سازی و نتایج تقریبا مشابهی را بدست می آورد.
در گزارش ورد مربوط به شبیه سازی, هر بخش توضیح داده شده که مربوط به پیاده سازی کدام قسمت می باشد.
نتایج بدست آمده از شبیه سازی با متلب
با متلب 2016b شبیه سازی انجام شده است و با متلب 2023a نیز تست و اجرا شده است.
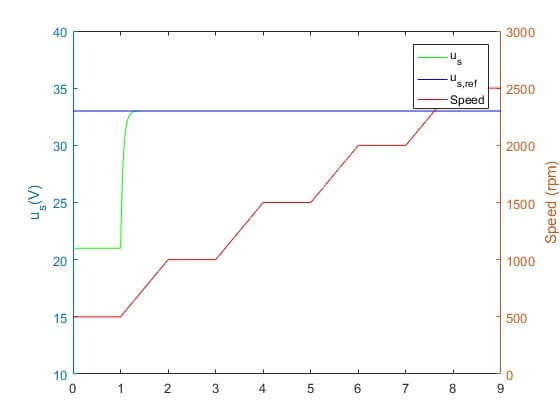
speed reference – us step response
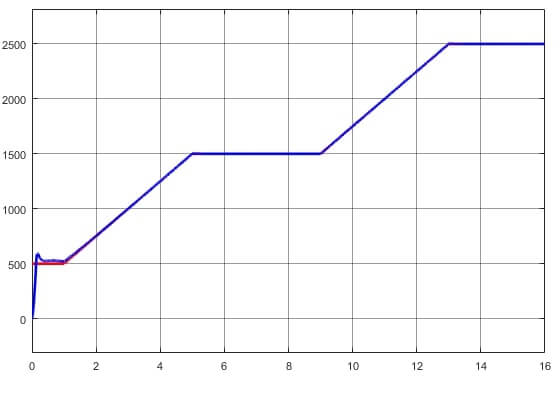
speed reference and feedback

us reference and response

phase current
شاید به موارد زیر نیز علاقه مند باشید:
- استراتژی کنترل جدید برای تبدیل دو جهته DC-DC در خودرو برقی
- شبیه سازی تغذیه سیکلو کانورتر موتور القایی انشقاق فاز
- حلقهی کرونا بهینه برای ولتاژهای متناوب 380 کیلوولت
- کنترل انحراف خودرو با فیدبک خروجی Hبینهایت مقاوم با استفاده از فرمان چرخ جلو فعال
کلیدواژه:
Field-weakening control, model predictive control (MPC), indirect field oriented control (IFOC), induction machine, electric vehicle
کنترل تضعیف میدان, کنترل پیش بینی مدل, کنترل میدان گرا غیر مستقیم, ماشین القایی, وسیله نقلیه الکتریکی
کنترل پیش بین مدل مبتنی بر استراتژی تضعیف میدان برای کشش خودرو الکتریکی مورد استفاده موتور القایی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.