توضیحات
کنترل ارتعاشات آشوبناک در سیستم انتقال قدرت چرخدنده ساده به کمک کنترل مد لغزشی
عنوان به لاتین:
Controlling Chaotic Vibrations in Power Transmission system with Spur Gear Using Sliding Mode Control
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 8 صفحه ای در مورد کدهای متلب و نتایج شبیه سازی است.
دارای ویدیوی توضیحات 8 دقیقه ای در مورد شبیه سازی است.
مقدمه:
ارتعاشات ناشی از لقی و دیگر پدیدههای غیرخطی موجود در سیستمهای انتقال قدرت چرخ دنده یکی از مشکلات رایج در صنایع مختلف است. هدف از مطالعه حاضر، کنترل رفتار آشوبناک سیستم انتقال قدرت جفت چرخدنده ساده با انتقال پاسخ سیستم به نزدیکی یک مدار ناپایدار متناوب و در نهایت دنبال کردن آن به کمک کنترل مد لغزشی است. مدل ارائه شده در این پژوهش مدل جفت چرخدنده ساده با در نظر گرفتن سختی متغیر با زمان، لقی و خطای انتقال استاتیکی میباشد. در ابتدا معادلات دینامیکی مدل مورد بحث استخراج میشود و شبیهسازیهایی برای بررسی رفتار آشوبناک آن به ازای مقادیر خاصی از پارامترهای معرّف سیستم انجام میگیرد. در ادامه با استفاده از نگاشت پوانکاره و یک الگوریتم کارامد مدار ناپایدار متناوبی برای سیستم آشوبناک یافت میشود. در نهایت برای پایدارسازی رفتار آشوبناک حول مدار ناپایدار متناوب سیستم، یک کنترلر مد لغزشی طراحی شده و به منظور نشان دادن کارایی کنترلر طراحی شده شبیهسازیهای عددی صورت میگیرد. شبیه-سازیهای عددی کارآمدی کنترل طراحی شده را نشان میدهند.
توضیحات پروژه کنترل اسلایدینگ مود
شبیه سازی شامل 6 ام فایل است. که در اینجا به صورت مختصر توضیح داده می شود:
فایل figure_3.m
این فایل جهت تولید نمودار 3 مقاله به کار می رود. برای تولید این شکل، نیاز است تا معادله 10 مقاله به صورت عددی حل شود.
فایل equation_10.m
این فایل دقیقا مانند figure_3 است با این تفاوت برای تولید نمودار 4 مقاله به کار می رود. تمام خطوط مانند حالت قبلی است
فایل satfun.m
در بخش کنترلی مقاله، یک رابطه اشباع داده شده است (رابطه 28 مقاله).
فایل sliding_mode_no_sat
در مقاله دو کنترلر آورده شده است:
کنترلر مود لغزشی بدون تابع اشباع و با تابع علامت که در این فایل آورده شده است.
کنترلر مود لغزشی با تابع اشباع که در یک فایل دیگر نوشته شده است.
فایل sliding_mode_with_sat
کنترلر مود لغزشی با تابع اشباع.
فایل main
شبیه سازی را با این فایل اجرا کنید و حتما گزینه Change Folder را انتخاب نمایید.
این فایل صرفا به فراخوانی سایر فایل های توضیح داده شده می پردازد و نمودارها را رسم می نماید.
نتایج بدست آمده از شبیه سازی با متلب:
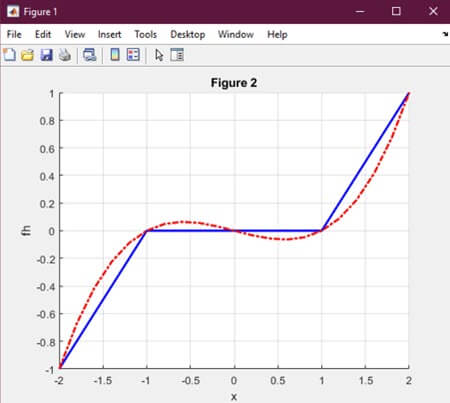
شکل2: تابع لقی و تابع درجه3 تقریب زده شده با آن
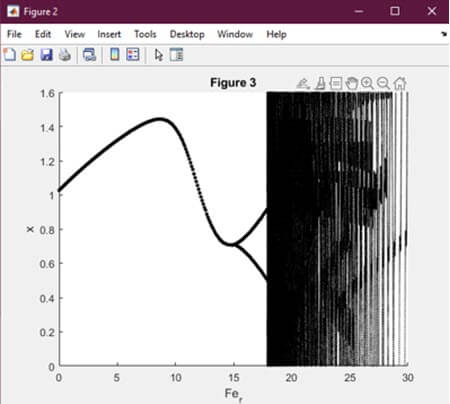
شکل3: نمودار دوشاخگی سیستم بر حسب پارامتر fer
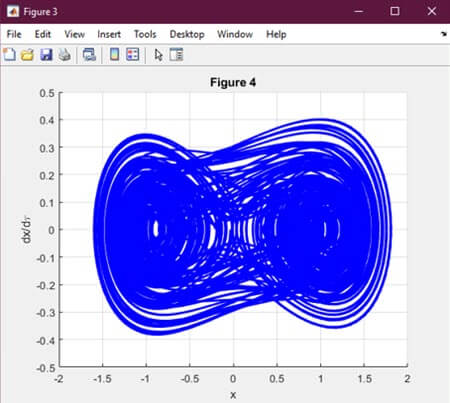
شکل4: ترسیمه فاز برای سیستم جفت چرخدنده درگیر در حالت وجود آشوب
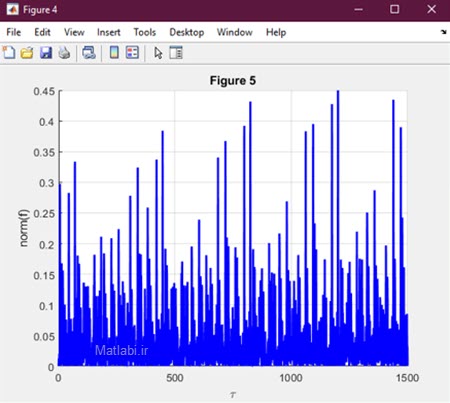
شکل5: (f(x برای سیستم انتقال قدرت آشوبناک چرخدنده ساده
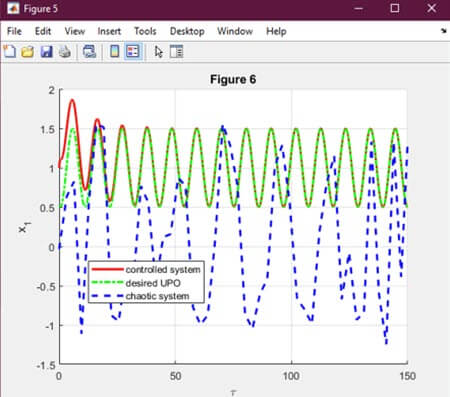
شکل6: پاسخ سیستم کنترل نشده(پاسخ آشوبناک) سیگنال مطلوب و پاسخ سیستم کنترلی حلقه بسته برای سیستم جفت چرخدنده
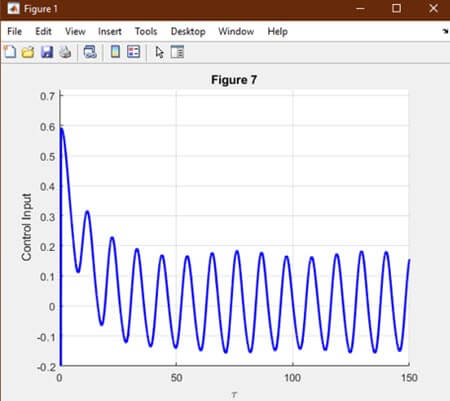
شکل7: سیگنال کنترلی مد لغزشی طراحی شده برای سیستم جفت چرخدنده در حالت استفاده از تابع اشباع
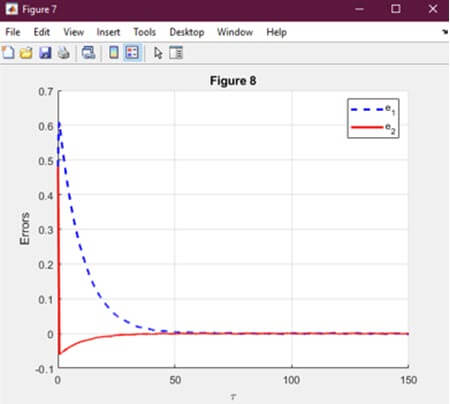
شکل8: تغییرات خطای متغیرهای حالت سیستم چرخدنده با اعمال کنترلر مدلغزشی
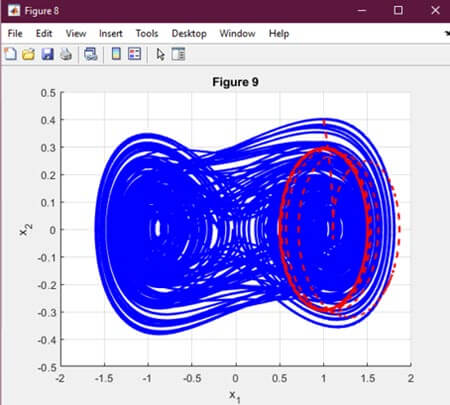
شکل9: پاسخ سیستم بدون کنترل آشوبناک و سیستم کنترل شده در صفحه فاز
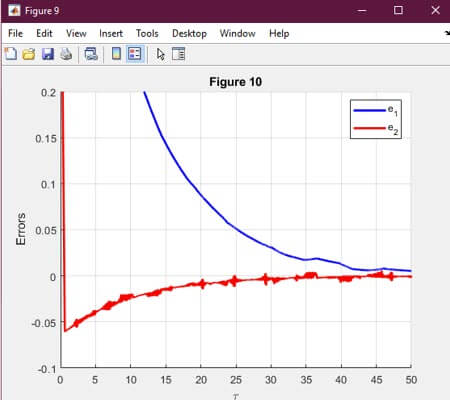
شکل10: تغییرات خطای متغیرهای حالت سیستم چرخدنده با اعمال کنترلر مد لغزشی با استفاده از تابع علامت و مشاهده چترینگ
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل سیستم های آشوب همراه با عدم قطعیت پارامتری و تغتشاشات تصادفی به روش LMPC
- مدل سازی و شبیه سازی کامیون با پاسخ لرزش تصادفی
- کنترل مد لغزشی مرتبه دوم گسسته چندمدلی: تحلیل پایداری و کاربرد زمانواقعی در یک راکتور شیمیایی
- بررسی تئوری و پارامتریک عملکرد میراگر ضربه ای قطر متغیر در ارتعاشات آزاد سیستم یک درجه آزادی
کلیدواژه:
کنترل آشوب, کنترل مود لغزشی
Chaos, Chaos control, Spur gear system, Unstable periodic orbit, Sliding mode control
کنترل ارتعاشات آشوبناک در سیستم انتقال قدرت چرخدنده ساده به کمک کنترل مد لغزشی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


امیرعلی تاج زاده –
بسیار عالی
نتایج بسیار نزدیک به مقاله بدست آمده ممنون