توضیحات
Anti-windup for model-reference adaptive control schemes with rate-limits
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای ویدیوی 10دقیقه ای توضیحات در مورد شبیه سازی توسط برنامه نویس
توضیحات پروژه
شبیه سازی مقاله کنترل تطبیقی با عنوان فوق در متلب انجام شده است.
داخل فایل های پروژه 4 پوشه وجود دارد که مربوط به شکل های 4-5-6 و 7 مقاله است. که هر کدام را اجرا کنید شکل متناظر با آن در مقاله را ایجاد می کند. در ام فایل ها کامنت گذاری برای هر بخش صورت گرفته و مثلا میتوان متوجه شد کدام معادله در ام فایل نوشته شده و…
در زیر نتایج مربوط به هر پوشه را جهت مشاهده آورده ایم:
نتایج شکل 4 مقاله
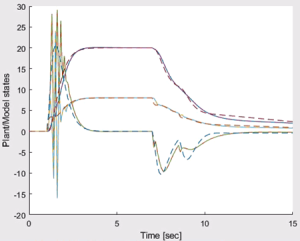
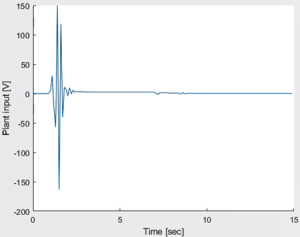
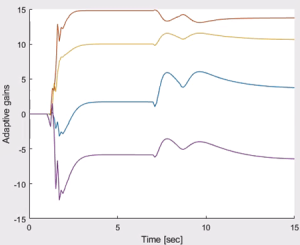
Fig. 4. Response of adaptive control system without rate-limits: left, plant/model state evolution; centre, plant input v; right adaptive gains Kˆx, Kˆr.
شکل های خروجی شبیه سازی مربوطه به شکل 5 مقاله:
در ویدیوی توضیحات در مورد تفاوت هر کدام از پوشه ها و تفاوت در کدنویسی آنها توضیح داده شده است.
در این بخش rate-saturation اضافه شده, rate-saturation یا همان نرخ اشباع
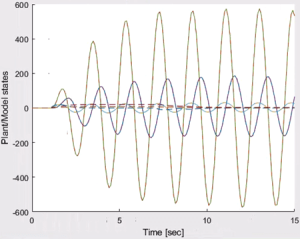
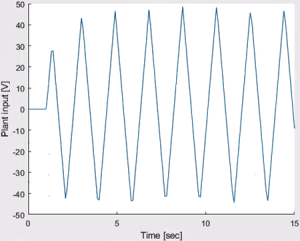
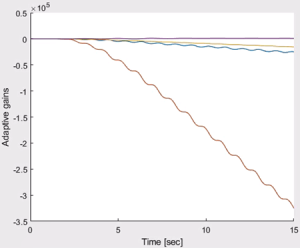
Fig. 5. Response of adaptive control system with input rate-saturation and no anti-windup: left, plant/model state evolution; centre, plant input v; right adaptive gains Kˆx, Kˆr.
برای شکل 6 مقاله saturation و anti-windup با هم داریم
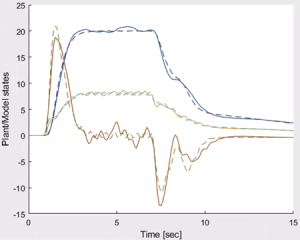
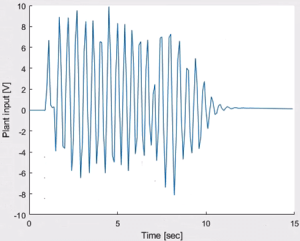
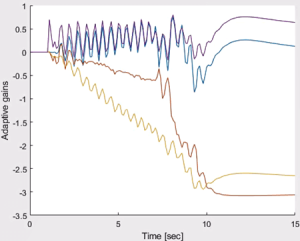
Fig. 6. Response of adaptive control system with input saturation and anti-windup: left, plant/model state evolution; centre, plant input v; right adaptive gains Kˆx, Kˆr.
در شکل 7 مقاله همانطور که توضیح داده شده همانند شکل 6مقاله هست با این تفاوت که Kˆu ≡ 0 باید قرار داده شود. لذا نتایج را بصورت زیر داریم:
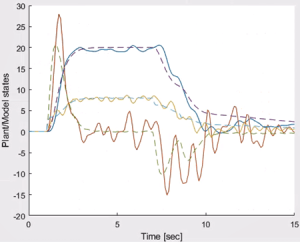
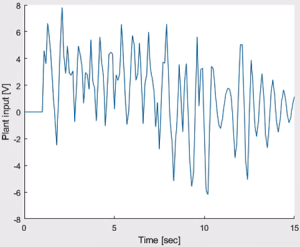
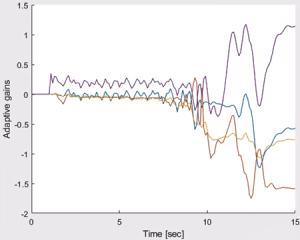
Fig. 7. Response of adaptive control system with input saturation and anti-windup with Kˆu ≡ 0: left, plant/model state evolution; centre, plant input v; right adaptive gains Kˆx, Kˆr.
همانطور که مشاهده میشود نتایج نزدیک به مقاله است. دلیل تفاوت کمی که در آن هست را برنامه نویس در ویدیو توضیح داده و مربوط به مقادیر برخی از پارامترهاست که مقاله در مورد آن چیزی نگفته است.
Anti-Windup:
توی کنترل کننده هایی که از خطا انتگرال میگیرند, وقتی محرک به حد اشباع میرسه دیگه انتگرال گیری از خطا نه تنها مفید نیست بلکه باعث رفتار غلط سیستم کنترل میشه, توی این حالت بخش انتگرال گیر رو غیر فعال کرده و سیگنال کنترل رو روی حد اشباع نگه می دارند.
به چنین کارها یا تکنیک هایی anti windup کردن کنترل می گویند.
شاید به موارد زیر نیز علاقه مند باشید:
- An anti-windup self-tuning fuzzy PID controller for speed control of brushless DC motor
- کنترل بهینه معکوس مقاوم برای پایدارسازی سیستم غیرخطی زمان گسسته
- طراحی ناظر ورودی ناشناخته غیرخطی برای سیستم های غیرخطی
کلیدواژه
Adaptive control, Anti-windup, Saturation
شبیه سازی مقاله Anti-windup for model-reference adaptive control schemes with rate-limits
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.