توضیحات
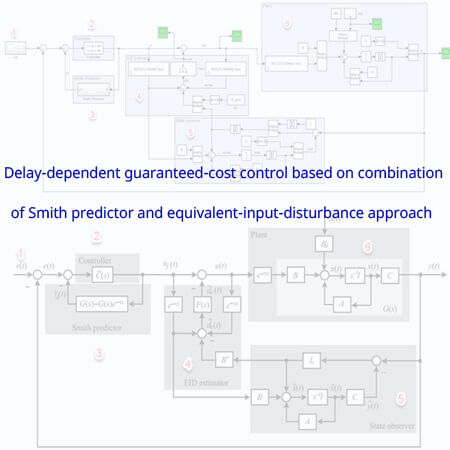
کنترل هزینه تضمین شده وابسته به تاخیر بر اساس ترکیب پیش بینی کننده اسمیت و رویکرد اختلال ورودی- معادل
Delay-dependent guaranteed-cost control based on combination of Smith predictor and equivalent-input-disturbance approach
شبیه سازی در محیط سیمولینک و ام فایل متلب انجام شده است.
دارای گزارش 13صفحه ای در قالب ورد است.
از تولباکس های یالمیپ و سدومی استفاده شده است.
توضیحات پروژه
شبیه سازی در محیط متلب 2018b انجام شده است. در گزارش این پروژه, ام فایلها و بخش های مهم سیمولینک توضیح داده شده است و در نهایت به مقایسه نتایج بدست آمده با مقاله پرداخته است.
نتایج شبیه سازی با متلب
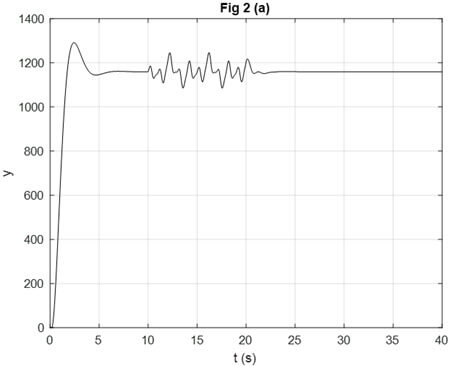
System output, y
ملاحظه می شود که شکل فوق مانند شکل 2 مقاله و بخش a آن است.

control input, u
شکل فوق نیز همانند شکل 2مقاله و بخش b آن است.

disturbance, d
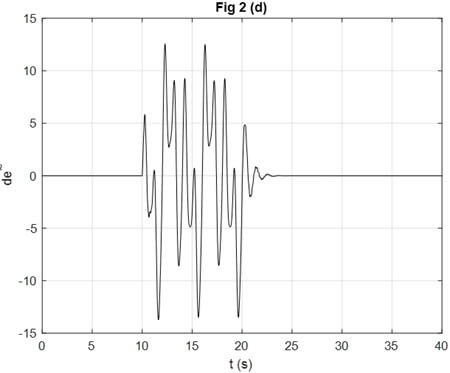
EID estimate, d~ e
اختلال را همانند شکل 2مقاله و بخش c و d آن شبیه سازی نموده ایم.
شکل 3
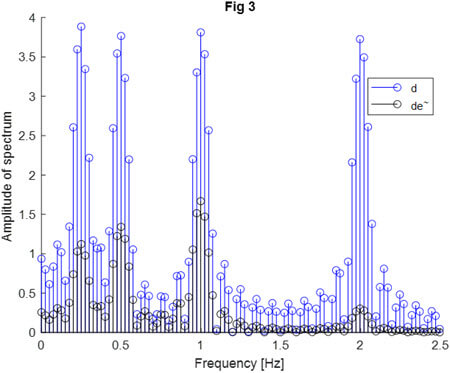
Spectrums of d and d~e
دقت کنید که تمام جزئیات رعایت شده است (اعداد محورهای افقی و عمودی). تغییرات نیز بسیار به هم نزدیک هستند. و خروجی آن مشابه شکل 3 مقاله شده است.
شکل 6
این شکل با اجرای فایل سیمولینک sim2_model_r2018b به دست می آید.
تمام جزئیات این مدل مانند مدل سیمولینک قبلی است و فقط یک اغتشاش با مقدار زیاد به آن اضافه شده است:

System output for (50) and (51) with measurement noise for SP-EID
ملاحظه می شود در این جا نیز مانند مقاله اغتشاش در سراسر شبیه سازی وجود دارد و نیز پایداری سیستم حفظ شده است.
شکل های 4و5 مقاله توضیحاتی ارائه نداده اند و بیشتر جنبه مقایسه ای دارند.
با مطابقت شکل های خروجی بدست آمده, میتوان نتیجه گرفت که شبیه سازی با دقت و کیفیت بالایی انجام شده است.
کلیدواژه:
Cone complementary linearization, Equivalent input disturbance (EID), Free-weighting matrix, Guaranteed-cost control, Smith predictor, Time delay
خطی سازی مکمل مخروطی, اختلال ورودی معادل (EID), ماتریس وزن دهی آزاد, کنترل هزینه تضمینی, پیش بینی کننده اسمیت, تاخیر زمانی
- تنظیم PID برای سیستمهای تاخیر متغیر با زمان بر اساس پیشبینیکننده اسمیت اصلاحشده
- کنترل فرکانس بار برای سیستم قدرت به هم پیوسته چند منبع با دو ناحیه توسط کنترل کننده های هوشمند
- کنترل موقعیت و سرعت موتورهای مغناطیسی دائمی، رویکرد فضای حالت
- یک رویکرد جدید برای مدلسازی و بهینهسازی شبکه عصبی موجک فازی
- شبکه عصبی مبتنی بر کنترل هیبرید برای رویکرد H بی نهایت سیستم رباتیک
شبیه سازی مقاله Delay-dependent guaranteed-cost control based on combination of Smith predictor and equivalent-input-disturbance approach
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.