توضیحات
An Adaptive Backstepping Nonsingular Fast Terminal Sliding Mode Control for Robust Fault Tolerant Control of Robot Manipulators
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش 7 صفحه ای در قالب ورد است.
دارای ویدیو 18 دقیقه ای که در آن شبیه سازی تشریح شده است.
توضیحات پروژه
شبیه سازی شامل فایلهای زیر است:
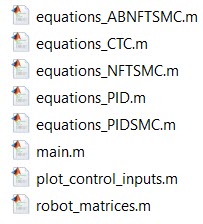
همانطور که از نام فایلها مشخص هست, در کدهای این پروژه کامنت گذاری و گزارش ورد و توضیحات ویدیویی با انطباق کد با مقاله صورت گرفته است.
نتایج شبیه سازی با متلب
پس از اجرای شبیه سازی جدول زیر ظاهر می گردد:
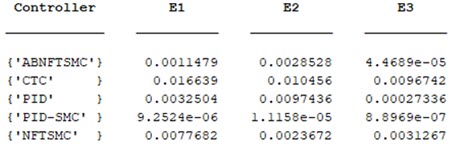
ملاحظه می شود نتایج مربوط به روش اصلی مقاله در مقایسه با سایر نتایج، پاسخ مطلوبی دارد.
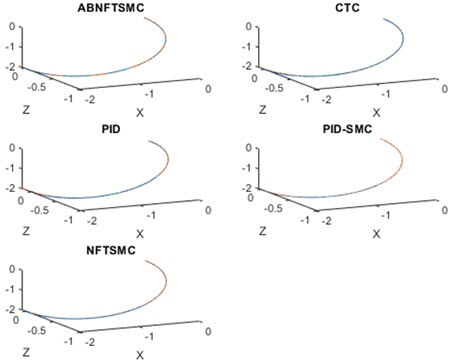
نمودار مسیر سه بعدی در ادامه نمایش داده شده است. ملاحظه می گردد که در تمام روش ها مسیر به دست آمده از شبیه سازی (نمودار آبی رنگ) بر روی مسیر مرجع (نمودار قرمز رنگ) افتاده است.
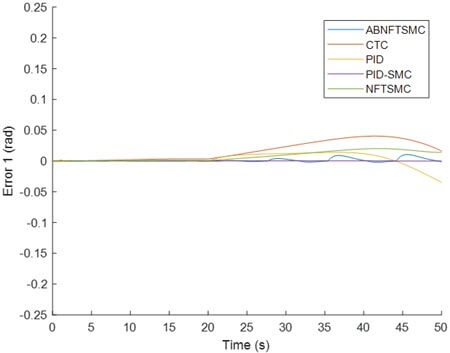
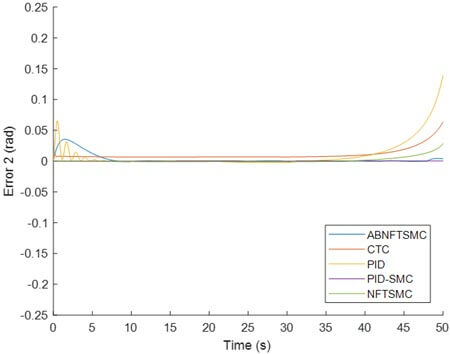
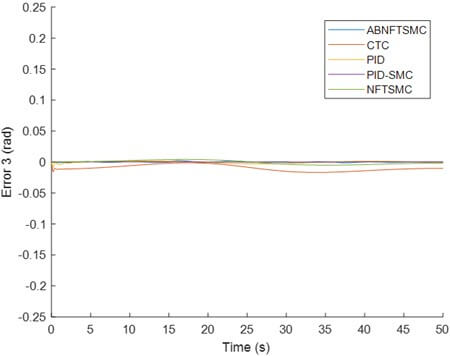
خطاهای مربوط به مفاصل در ادامه نمایش داده شده است. ملاحظه می شود در هر سه مفصل نمودار آبی رنگ که مربوط به روش اصلی مقاله است، به خط صفر نزدیک تر می باشد:
نمودار ورودی کنترلی نیز در ادامه آورده شده است. ملاحظه می گردد هم چون مقاله تمام ورودی ها در محدوده مطلوب قرار دارند.
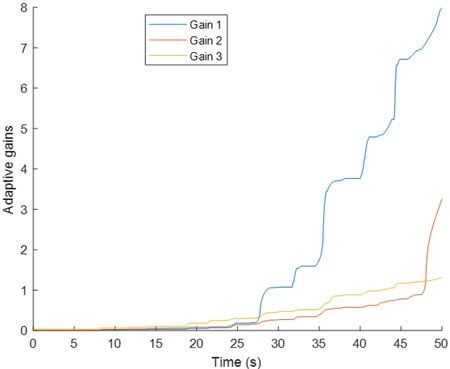
در نهایت نمودار مربوط به ضرایب بهره روش اصلی نمایش داده شده است. نتایج به دست آمده در محدوده مطلوب تری (حتی نسبت به مقاله) قرار دارند:
کلیدواژه:
Control of robots, backstepping control, fault tolerant control, terminal sliding mode control
An Adaptive Backstepping Nonsingular Fast Terminal Sliding Mode Control for Robust Fault Tolerant Control of Robot Manipulators
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.