توضیحات
طراحی کنترل کننده LQR و LQG و فیلتر کالمن برای زیردریایی فونیکس
LQR and LQG controller design and Kalman filter for Autonomous Underwater Vehicle Phoenix
شبیه سازی در محیط سیمولینک متلب انجام شده است.
سیمولینک ها برای متلب 2017 و 2020 تهیه شده است.
دارای 11 صفحه گزارش در قالب ورد است.
توضیحات پروژه
هدف کنترل ربات زیردریایی مورد نظر به روش های LQR و LQG و تخمین همزمان متغیرهای حالت آن با فیلتر کالمن می باشد.
در گزارش این پروژه روابط و معادلات به خوبی تحلیل و توضیح داده شده اند. معادلات به صورت خطی و مقادیر ویژه آن محاسبه شده و یک مقدار ویژه مثبت وجود دارد. در نتیجه سیستم ناپایدار می باشد و جهت پایداری به کنترلر نیاز دارد. برای این منظور دو کنترلر LQR و LQG برای پایدارسازی آن طراحی می شود و به صورت همزمان متغیرهای حالت آن با فیلتر کالمن تخمین زده می شوند.
برای کنترلر LQR
ابتدا تابع هدف کنترلر تعریف شده و سپس ماتریس های وزنی تعریف میشوند و در نهایت کنترلر اعمال میشود و نتیجه این بوده که هر دو مقدار ویژه منفی شدند و در نتیجه سیستم پایدار شده است.
برای کنترلر LQG
ضریب کنترلی LQG به صورت یک مدل فضای حالت (و نه یک ضریب ثابت) داده می شود که خروجی این مدل، ورودی کنترلی سیستم اصلی است و این دو مدل به صورت سری به هم متصل می شوند. در این حالت نیز در گزارش به صورت هم تئوری و هم عملی توضیحات داده شده است.
نتیجه اینکه با این کنترلر نیز به خوبی سیستم پایدار شده است.
شبیه سازی شامل سیمولینک و ام فایل است. در ام فایل ماتریس های خطی سازی و ورودی های سیمولینک تعریف شده و در نهایت نتایج نموداری توسط ام فایل ظاهر می گردد.
سیمولینک های مربوط به LQR و LQG در گزارش تشریح شده اند.
بلوک فیلتر کالمن جهت تخمین متغیرهای سیستم نیز در سیمولینک ایجاد و در گزارش نمایش داده شده است.
نتایج شبیه سازی با متلب
با اجرای شبیه سازی ها نتایج زیر حاصل می شود.
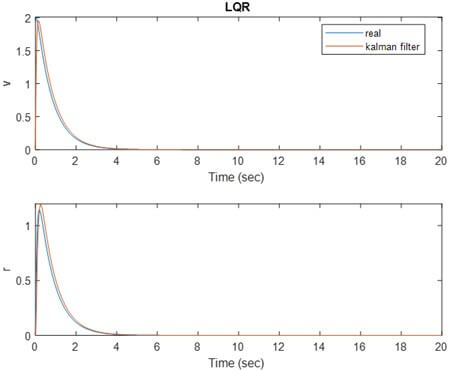
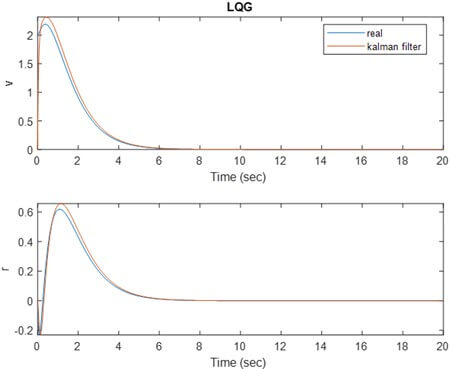
ملاحظه می شود متغیرهای v و r از به صفر می رسند (کنترلر روی آن ها اثر مناسب داشته است). هم چنین فیلتر کالمن به خوبی به تخمین متغیرها پرداخته است و نمودارهای قرمز رنگ بسیار نزدیک به آبی (نمودارهای اصلی) هستند:
متغیر زاویه psi نیز در هر دو مدل به یک مقدار ثابت رسیده است:


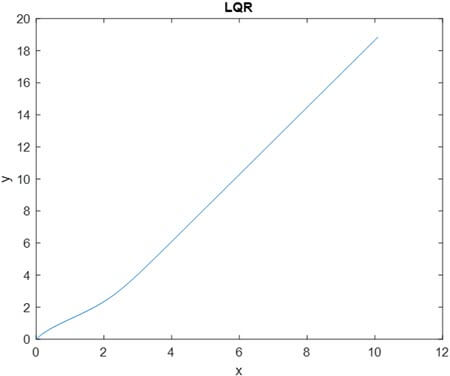
تغییرات موقعیت ربات نیز در ادامه نشان داده شده است. ملاحظه می شود با اعمال کنترلرهای طراحی شده، این مسیر تقریبا یک خط راست می باشد:

طراحی و شبیه سازی کنترل کننده LQR و LQG و فیلتر کالمن برای زیردریایی فونیکس
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.