توضیحات
کنترل مقاوم تحمل پذیر خطای ارتقا یافته مبتنی بر کنترل مود لغزشی تطبیقی فازی PID با همگرایی سریع برای سیستم های غیرخطی شامل عدم قطعیت
عنوان مقاله اصلی:
An Enhanced Robust Fault Tolerant Control Based on an Adaptive Fuzzy PID- Nonsingular Fast Terminal Sliding Mode Control for Uncertain Nonlinear Systems
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 10 صفحه ای می باشد.
دارای ویدیو 15دقیقه ای که در آن برنامه نویس در مورد شبیه سازی و نتایج آن توضیحات ارائه کرده است.
توضیحات پروژه
در این مقاله یک کنترل مقاوم تحمل پذیز خطا با استفاده از یک روش کنترلی جدید مبتنی بر مود لغزشی تطبیقی PID فازی طراحی شده است. از تخمین گر فازی برای تخمین دینامیک نامعین سیستم استفاده می شود. هم چنین یک قانون تطبیقی برای تخمین محدوده عدم قطعیت و خطاها طراحی گردیده است. با این کار دیگر نیازی به دانستن مقادیر محدوده عدم قطعیت و نیز دینامیک دقیق سیستم نمی باشد. این روش کنترلی به دینامیک وضعیت یک فضاپیما اعمال گردیده است. خواسته مساله به این صورت است که متغیرهای حاالت وضعیت فضاپیما باید از مقدار اولیه به صفر رسیده و در آن باقی بمانند. این کار در حضور اغتشاشات خارجی صورت می گیرد.
هدف و نتيجه گيري مقاله
هدف مقاله از اعمال این کنترلر، رساندن وضعیت فضاپیما از یک مقدار اولیه به صفر است. این کار در حضور عدم قطعیت ها و اغتشاشات صورت می گیرد. افزوده شدن PID به قانون کنترلی باعث افزایش مقاومت و بهبود پاسخ گذرای سیستم می گردد. هم چنین خطای تعقیب نیز به خوبی کاهش پیدا می کند و علاوه بر آن تاثیر پدیده chattering نیز بسیار اندک خواهد بود. پایداری تمام سیستم در مقاله توسط قانون لیاپانوف ثابت شده است.
بخشی از گزارش شبیه سازی:
در خطوط 14 تا 30 ورودی های مساله داده شده اند. چهار ورودی اول در مقاله و نیز مقاله مرجع 38 داده نشده اند بنابراین یک مقدار تقریبی قرار دادم. هم چنین برخی از ثابت ها را قدری تغییر دادم تا عملکرد کنترلر بهتر گردد.
در خطوط 33 و 34 معادلات مربوط به کنترلر PID-NFTSM و AF PID-NFTSM حل می شود و خروجی ها به دست می آید.
نکته مهم: در نمودارهای مقاله سه کنترلر دیگر هم وجود دارند. طبق قسمتی از مقاله که در ادامه آورده شده این 3 کنترلر از مراجع دیگری گرفته شده است و صرفا برای مقایسه آورده شده. بنابراین نمودارهای مربوط به آن ها رسم نمی گردد زیرا جز مطالب مقاله نیستند.
نتایج شبیه سازی با متلب
نتایج مربوطه به دو روش کنترلر PID-NFTSM و AF PID-NFTSM که از شبیه سازی با متلب بدست آمده است:
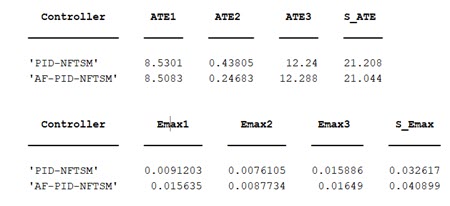
COMPARISON IN AVERAGE TRACKING ERROR and COMPARISON IN MAXIMUM ERROR
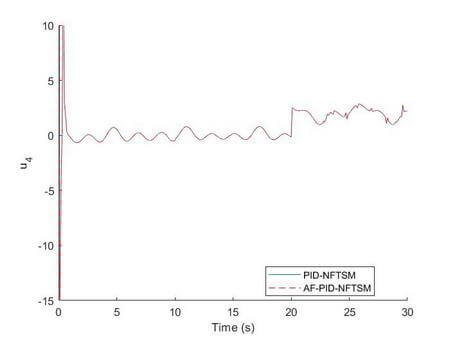
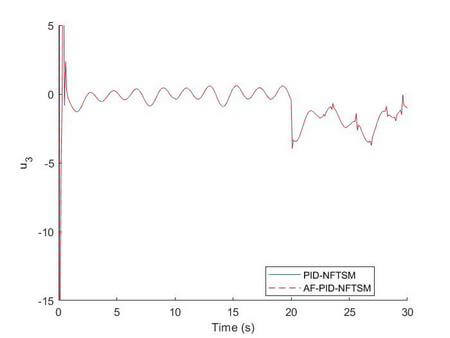
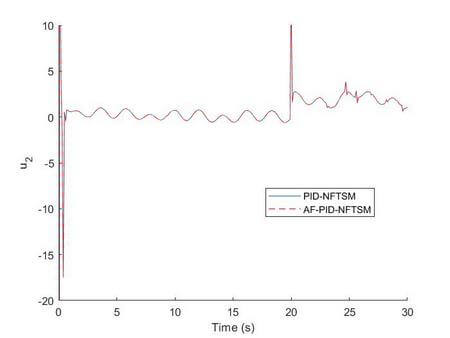
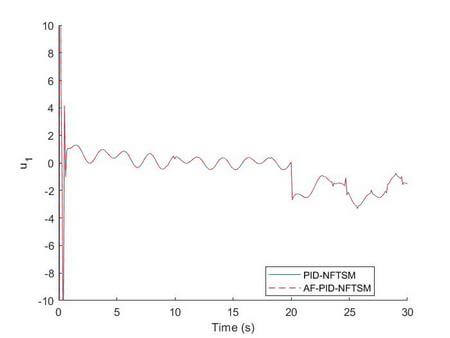
Time histories of four control inputs
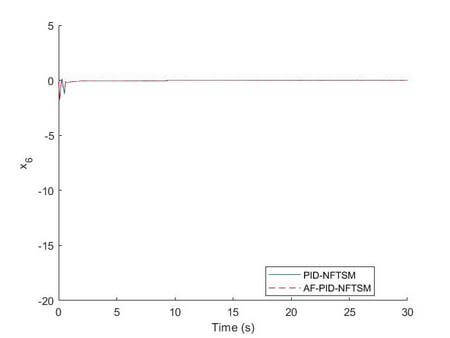
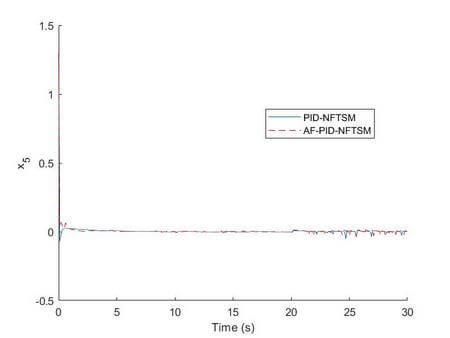
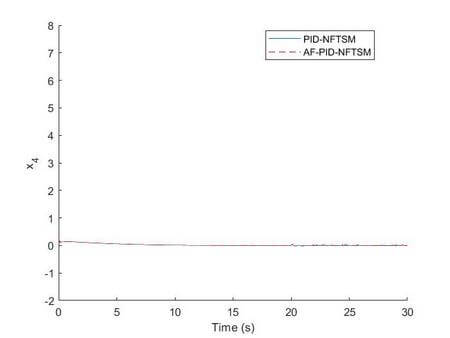
Time history of system states x4 , x5 , x6 under the effect of the generated fault
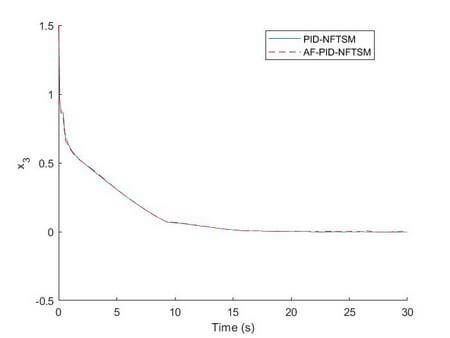
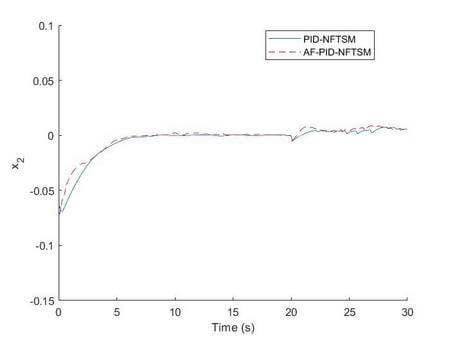
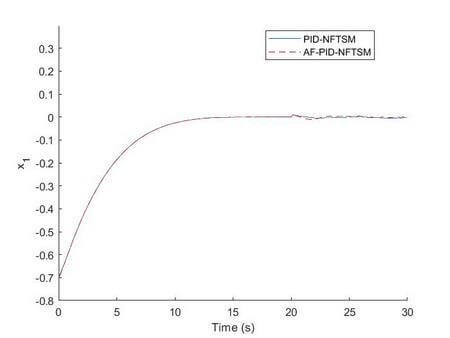
Time history of system states x1 , x2 , x3 under the effect of the generated fault
کلیدواژه:
Fault diagnosis, fault tolerant control, highorder sliding mode control, nonlinear systems, sliding mode control
کنترل مقاوم تحمل پذیر خطای ارتقا یافته مبتنی بر کنترل مود لغزشی تطبیقی فازی PID با همگرایی سریع برای سیستم های غیرخطی شامل عدم قطعیت
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.