توضیحات
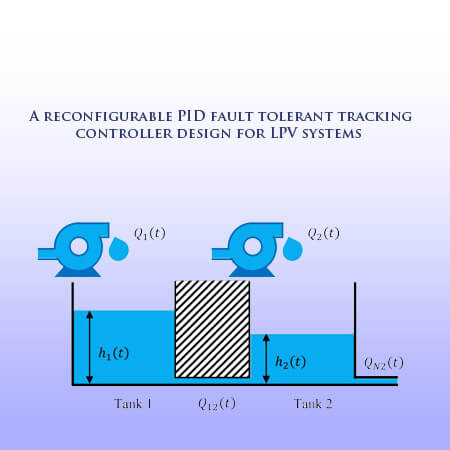
A reconfigurable PID fault tolerant tracking controller design for LPV systems
شبیه سازی در محیط سیمولینک و ام فایل متلب انجام شده است.
شبیه سازی با متلب 2015 و 2020 تست و اجرا شده است.
دارای گزارش 10 صفحه ای در قالب ورد است.
توضیحات پروژه
در اینجا بخش هایی از گزارش این پروژه را جهت مشاهده قبل از خرید, آورده ایم:
شبیه سازی ها در پوشه simulation قرار دارند.
دو پوشه دیگر به نام های sedumi-master و YALMIP-master داخل این پوشه هستند که مربوط به جعبه ابزار بهینه سازی YALMIP می باشند.
- شبیه سازی با فایل main اجرا می شود.
خطوط 10 و11: افزودن پوشه های دیگر به مسیر محاسبات.
خط 14: نصب حل گر sedumi که برای بهینه سازی با YALMIP مورد استفاده قرار می گیرد.
خط 17: فراخوانی فایل inputs که داخل آن ثابت ها و ورودی های مساله قرار داده شده اند.
…
- توضیحات فایل سیمولینک
دو مدل فایل سیمولینک ساخته شده است که یکی از آن ها با نام faulty و دیگری با نام healthy مشخص شده اند. تنها تفاوت در این است که مقدار خطا در فایل healthy صفر می باشد.
در ادامه گزارش نیز بخش های مختلف فایل سیمولینک به همراه تصویر آن توضیح داده شده است.
نتایج شبیه سازی با متلب
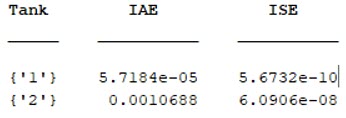
با اجرای فایل main نتایج زیر به دست می آید. ملاحظه می شود نتایج بسیار به مقاله نزدیک هستند:
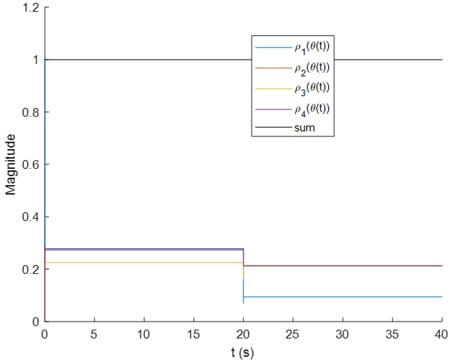
Gain scheduling functions
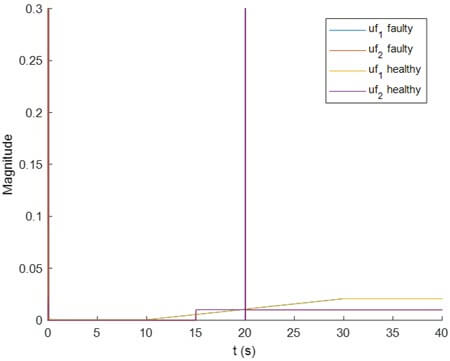
Fig. 4. The FTC signals uf 1(t) and uf 2(t) provided by the proposed PID-FTTC
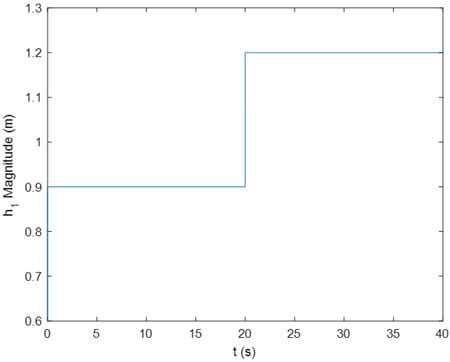
Fig. 5. Different comparisons of reference tracking hr1(t) with the real liquid level h1(t) by using the PID-FTTC, an AFTC and also a PID controller
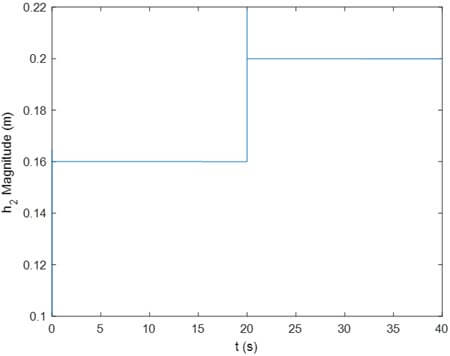
Fig. 6. Different comparisons of reference tracking hr2(t) with the real liquid level h2(t) by using the PID-FTTC, an AFTC and also a PID controller
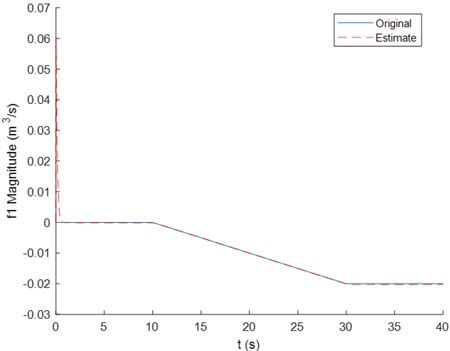
Fig. 7. The real actuator fault f1(t) and its estimate given by the developed APO
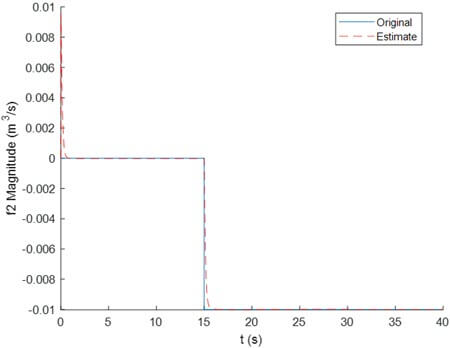
Fig. 8. The real actuator fault f2(t) and its estimate given by the developed APO
کلیدواژه:
LPV system, PID fault tolerant tracking controller, Adaptive polytopic observer, LMIs
A reconfigurable PID fault tolerant tracking controller design for LPV systems
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.