توضیحات
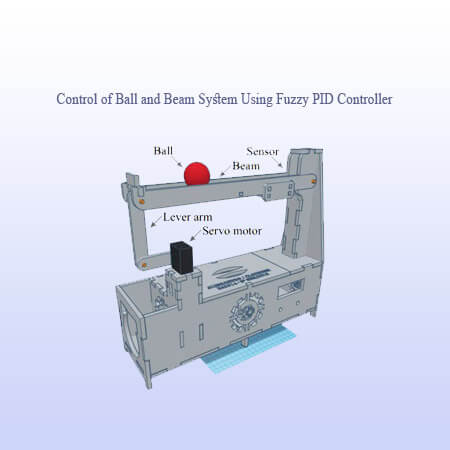
Control of Ball and Beam System Using Fuzzy PID Controller
کنترل سیستم توپ و میله با استفاده از کنترلر PID فازی
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش 9 صفحه ای در قالب ورد است.
دارای ویدیوی 4دقیقه ای که در آن توضیحات در مورد شبیه سازی داده شده است.
همچنین دارای ترجمه مقاله در قالب ورد می باشد.
بخشی از ترجمه مقاله
چکیده- در این مقاله، کنترلکننده PID فازی برای کنترل سیستم گوی و میله استفاده شد. منطق فازی برای میزانسازی پارامترهای این کنترلکننده PID در زمان واقعی استفاده میشود. این بهروزرسانی بهره در هر زمانی اتفاق میافتد که اختلال در سیستم وجود داشته باشد. با این پیکربندی، هدف بهبود عملکرد سیستم گوی و میله است. این کنترلکننده در محیط مطلب-سیمولینک طراحی شده است و در ادامه برای آردینو برای آزمون دانلود میشود. عملکرد حلقه بسته و تلاشهای کنترلکننده با PID مرسوم میزانسازی شده با الگوریتم تکامل دیفرانسیل مقایسه میشود. نتایج شبیهسازی نشان میدهد کنترلکننده PID فازی پیشنهادی پاسخهایی با نوسان کمتر، همراه با فرارفت کمتر و زمان تهنشینی پایینتر نسبت به کنترلکننده PID دارد.
مقدمه
سیستمهای جانمایی تقریباً در هر حوزه صنعتی، یا با سرووموتورها برای برادهبرداری دقیق یا با جابجایی ساده مواد بین فرایندهای تولید ارائه میشوند. جایگاه دقیق شیء خاص میتواند تفاوت بین موفقیت و شکست در فرایند تولید را بیابد. کنترل جایگاه با طراحی مناسب از کارکرد دقیق ماشین اطمینان میدهد و اثربخشی بیشتری به لحاظ عملکرد سیستم فراهم میکند هنگامی که با اختلالهای بیرونی مواجه میشود.
سیستم گوی و میله سیستم جانمایی است که متشکل از گوی غلطان بر روی میله ثابت در یک سر و متصل به سیستم گردان سروو موتور در سر دیگر است. این سیستم نمایشگر مسئله ثابتسازی چالش است، که نماینده دشواریهای معرفی شده توسط غیرخطیهای فزاینده سریع است. چند روش کنترل پیشرفته در این حوزه در طی دهههای گذشته اجرا شده بود [1]-[5].
برطبق بررسی منابع، رویکرد موفق استفاده از تکنیکهای الگوریتم تکاملی (EA) برای میزانسازی پارامترهای کنترلکننده PID است. رویکرد موفق دیگر استفاده از هوش مصنوعی برای میزانسازی آنلاین بهرههای PID است. با توجه به این مطلب، کنترلکننده PID فازی برای کنترل سیستم گوی و میله استفاده شد. تمایز این اثر به این ترتیب است که قبل از پیکربندی پارامترهای سیستم فازی، الگوریتم تکامل دیفرانسیل برای یافتن بهرههای بهینه کنترلکننده PID اجرا میشود. سپس، بعد از آن، سیستم فازی برطبق این پارامترها پیکربندی میشود که با الگوریتم تکاملی دیفرانسیل پیدا میشود.
این کنترلکننده در محیط Matlab طراحی شده است و سپس برای آزمون برای Arduino دانلود میشود. بنابراین، برای اعتبارسنجی پیشنهاد PID فازی، نتایج کاربرد کنترلکننده PID فازی در سیستم گوی و میله واقعی ارائه خواهد شد. عملکرد کنترلکننده پیشنهادی در حوزه زمانی با مقایسهاش با کنترلکننده PID میزانسازی شده با الگوریتم تکاملی دیفرانسیل تصدیق میشود.
این مقاله به شرح ذیل ساختاربندی شده است. در بخش 2، مدل تاسیسات ارائه میشود. در بخش 3، کنترلکننده PID بررسی میشود، و در ادامه در بخش 4 الگوریتم تکاملی دیفرانسیل ارائه میشود. در بخش 5، کنترلکننده منطق فازی ترسیم میشود. در بخش 6، توسعه کنترلکننده پیشنهادی تبیین میشود. سپس، در بخش 7، مقایسه نتایج شبیهسازی کنترلکننده پیشنهادی با کنترلکننده دیگر انجام میشود. در نهایت، در بخش 8، نتیجهگیری انجام میشود.
توضیحات پروژه
در گزارش این پروژه ابتدا کد برنامه توضیح داده شده است و سپس نتایج بدست آمده آورده شده و در انتها در مورد فایل فازی توضیحات ارائه شده است.
بخش هایی از گزارش را برای نمونه و رویت قبل از خرید در اینجا آورده ایم:
خطوط 18 تا 23: ورودی های داده شده در مقاله.
خطوط 24 تا 26: داده های مربوط به ضرایب PID جهت مقایسه با سیستم فازی.
خط 27: موقعیت مطلوب توپ که طبق گفته مقاله 8 سانتی متر است.
خطوط 29 تا 40: طبق گفته مقاله سه نوع اغتشاش به سیستم وارد می شود. مقاله در این مقدار این اغتشاشات هیچ توضیحی نداده است و فقط گفته که اغتشاشات کوچک، متوسط و یا بزرگ می باشند. در این خطوط از کاربر پرسیده می شود که اغتشاش مورد نظر از کدام نوع است. پس از انتخاب برای اغتشاش کوچک مقدار 0.02، برای اغتشاش متوسط مقدار 0.04 و برای اغتشاش بزرگ مقدار 0.10 به سیستم اعمال می شود.
خطوط 42 تا 44: حل معادلات مربوط به سیستم با کنترلر PID معمولی.
خطوط 46 تا 48: حل معادلات مربوط به سیستم با کنترلر PID فازی.
…..
شبیه سازی به راحتی با اجرای یک ام فایل main قابل اجراست.
نتایج شبیه سازی با متلب
اغتشاش کوچک

Ball position response with PID and fuzzy PID controllers
implemented in real time plant for a small perturbation
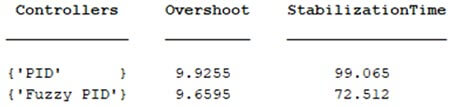
SIGNAL PERFORMANCE FOR SMALL PERTURBATION

Ball position response with PID and fuzzy PID controllers
implemented in real time plant for a medium perturbation
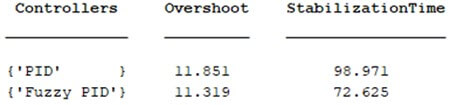
SIGNAL PERFORMANCE FOR MEDIUM PERTURBATION

Ball position response with PID and fuzzy PID controllers
implemented in real time plant for a big perturbation
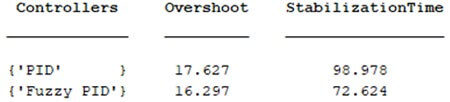
SIGNAL PERFORMANCE FOR BIG PERTURBATION
- نتیجهگیری
در این مقاله، کنترلکننده PID فازی برای کنترل سیستم گوی و میله استفاده شد. برای آزمونهای کنترلکننده پیشنهادی، سه اختلال در این سیستم اعمال شد. کنترلکننده PID فازی در ادامه با کنترلکننده PID مرسوم مقایسه شد که با الگوریتم تکاملی دیفرانسیل میزانسازی میشود. دو کنترلکننده در محیط MATLAB-Simulink توسعه یافت. کنترلکننده PID فازی عملکرد برتر نسبت به کنترلکننده PID مرسوم در تمام موردها نشان داد. پاسخهای کنترلکننده PID فازی هموارتر، با نوسان کمتر، فرارفت کمتر و زمان نشست کمتر بود.
کلیدواژه:
PID فازی, سیستم گوی و میله, حسگر ماوراء صوت
Control of Ball and Beam System Using Fuzzy PID Controller
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.