توضیحات
Kinematics, dynamics and control design of 4WIS4WID mobile robots
سینماتیک ، دینامیک و طراحی کنترل ربات های موبایل 4WIS4WID
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 4 صفحه ای است.
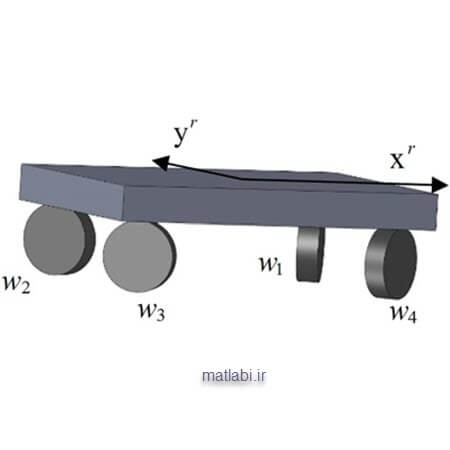
ربات 4WIS4WID دارای چهار چرخ مستقل از هم هست که هر کدام به تنهایی کنترل میشود.
در این مقاله یک طرح کنترل ردیابی مسیر برای ربات موبایل 4WIS4WID ایجاد شده است ، جایی که هم کنترل حرکتی غیر خطی و هم کنترل حالت اسلایدینگ مود پویا طراحی شده است.
تمام قوانین کنترل حرکتی و دینامیکی توسط تجزیه و تحلیل پایداری لیاپونوف در مقاله اثبات شده است. سرانجام ، امکان سنجی و اعتبار طرح کنترل ردیابی مسیر پیشنهادی از طریق شبیه سازی رایانه ای با متلب تأیید می شود.
توضیحات پروژه
این پروژه از چهار شبیه سازی تشکیل شده است.
در پوشه simulation چهار پوشه موجود است که نام هر کدام متناسب عکسهای مقاله است. مثلا پوشه fig 4 – 5 شبیه سازی شکلهای 4 و 5 مقاله است و به همین ترتیب.
محتویات تمام کدها مانند هم است و فقط برخی ورودی های آن مانند مسیرهای مرجعی که ربات باید طی کند فرق میکند.
هر شبیه سازی از 2 کد main و systemEquations تشکیل شده است.
شبیه سازی ها را با فایل main انجام دهید.
معادلات در systemEquations قرار دارد.
درون گزارش این پروژه, توضیحات در مورد خطوط برنامه متلب داده شده است.
برای شبیه سازی fig 8 به دلیل اینکه معادله ورودی کنترلی طبق گفته مقاله تفاوت دارد و PID است، خط 134 این شبیه سازی دارای معادله کنترلی متفاوتی است.
نتایج شبیه سازی با متلب
در زیر نتایج شبیه سازی مقاله را با متلب ملاحظه می نمایید. در تمام شبیه سازیها، نتایج تا حد زیادی شبیه به مقاله است. نمودارهای واقعی به خوبی مقادیر مطلوب را تعقیب میکنند و خطای تعقیب مانند مقاله حدود صفر می باشد.
شکل های 4 و 5
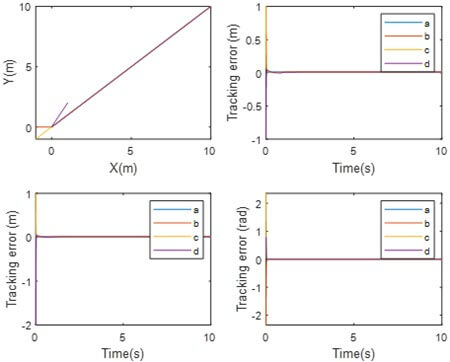
Simulation results of the straight trajectory of the four initial positions
a x–y plot of the 4WIS4WID mobile robot
b–d Tracking errors of xe, ye and θe
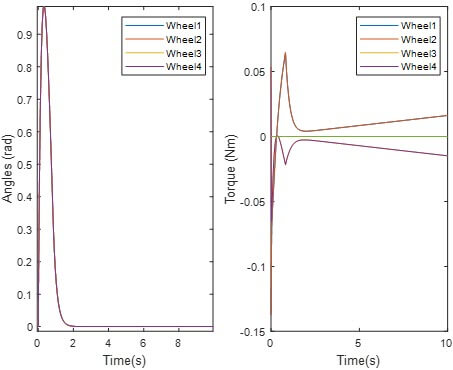
Fig. 5 Steering angle and rolling torque of the four wheels of the initial position d
a Steering angle
b Rolling torque
شکل 6
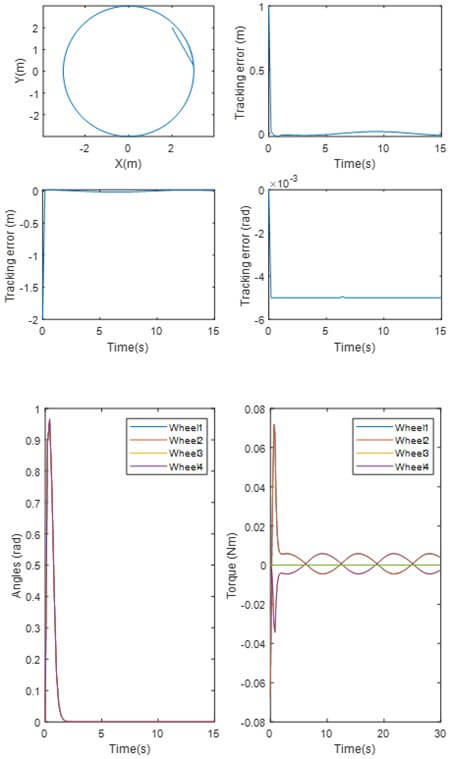
Fig. 6 Simulation results of Case (I)
a x–y plot of the 4WIS4WID mobile robot
b–d Tracking errors of xe, ye and θe
e Steering angle of four wheels
f Rolling torques of four wheels
شکل 7
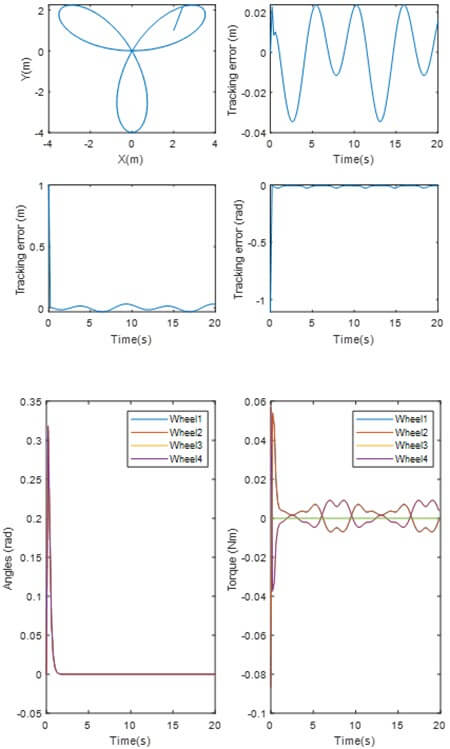
Fig. 7 Simulation results of Case (II)
a x–y plot of the 4WIS4WID mobile robot
b–d Tracking errors of xe, ye and θe
e Steering angle of four wheels
f Rolling torques of four wheels
کلیدواژه:
mobile robots, trajectory control, Lyapunov methods, nonlinear control systems, variable structure systems, robot dynamics, robot kinematics
شبیه سازی
Kinematics, dynamics and control design of 4WIS4WID mobile robots
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.