توضیحات
Adaptive Linear Quadratic Regulator for Continuous-Time Systems with Uncertain Dynamics
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش فارسی 5 صفحه ای در قالب ورد است.
توضیحات پروژه
دقت کنید که برخی از نمودارهای موجود در مقاله از مرجع 14 گرفته شده اند و متعلق به روش مقاله نیستند.
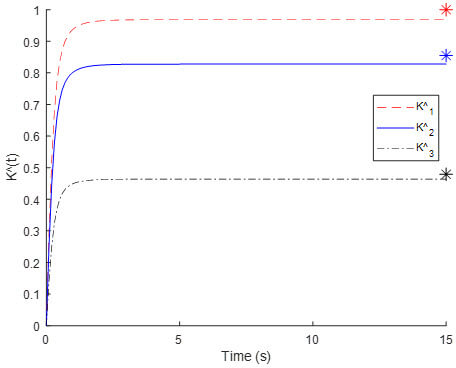
ضرایب کنترلی: ملاحظه میشود که همچون مقاله، در اینجا نیز ضرایب به خوبی به مقادیر مطلوب خود همگرا شده اند.
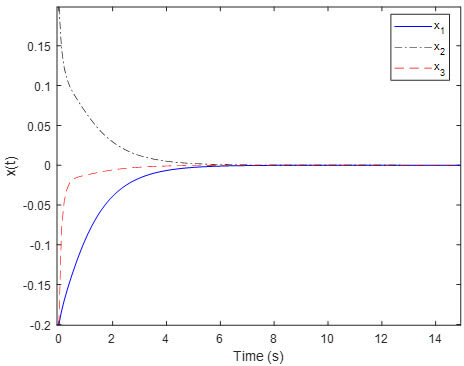
متغیرهای حالت: همچون ممقاله، در این جا نیز متغیرها به خوبی در زمان اندکی به مبدا همگرا گردیدهاند.
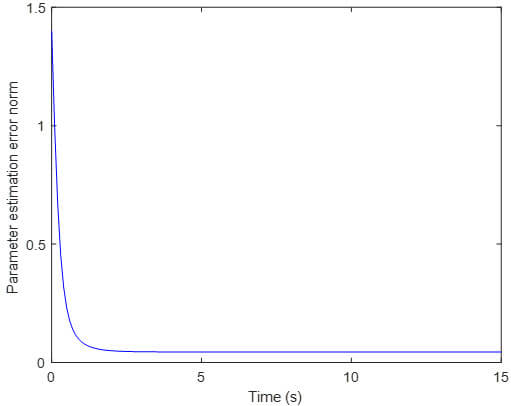
تغییرات نرم ضرایب کنترلی: ملاحظه میشود که در اینجا نیز پارامتر نرم از 1.4 به نزدیکی صفر رسیده است.
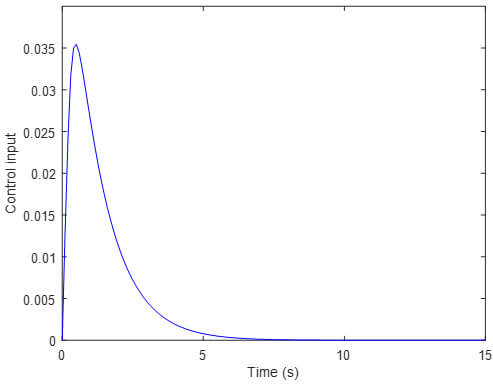
تغییرات ورودی کنترلی: همچون مقاله در اینجا نیز ورودی کنترلی در زمان اندکی به صفر همگرا شده است.
کلیدواژه:
Linear quadratic regulator, Adaptive optimal control, Continuous policy update, Uncertain system dynamics
شبیه سازی Adaptive Linear Quadratic Regulator for Continuous-Time Systems with Uncertain Dynamics
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.