توضیحات
PID, LQR and LQR-PID on a Quadcopter Platform
طراحی کنترلر LQR , PID و LQR-PID برای کوادکوپتر
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده است.
دارای گزارش ورد 8 صفحه ای است.
توضیحات پروژه
در گزارش این پروژه ابتدا معادلات هر بخش معرفی شده اند و در پایان نتایج بدست آمده از شبیه سازی مربوط به همان بخش نمایش داده شده است.
در زیر نتایج شبیه سازی را بررسی می نماییم.
الف) طراحی LQR برای کواد کوپتر
نتایج شبیه سازی کنترل موقعیت و سرعت بصورت زیر است.


ب) تنظیم PID با معیار ITAE


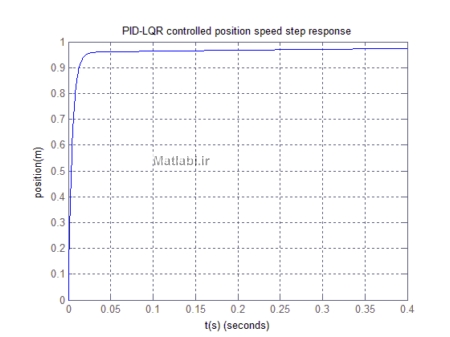
ج) LQR با تنظیم PID
ج-1) کنترل سرعت عمودی
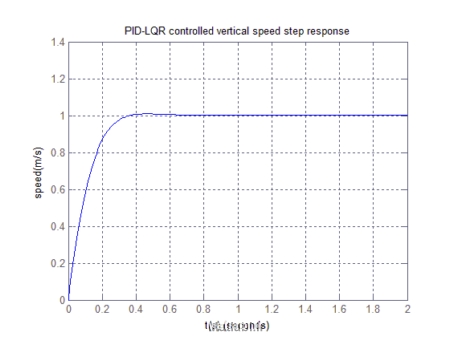
ج-2) کنترل موقعیت عمودی
کلیدواژه:
Mathematical model, Equations, Tuning, Aerospace electronics, Transfer functions, Vehicle dynamics, Attitude control, PID, LQR
شبیه سازی PID, LQR and LQR-PID on a Quadcopter Platform
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.