
توضیحات
يك سيستم كنترل غيرخطی فرمان فعال براي افزايش پايداری جانبی خودرو
Nonlinear Active Steering Controller for Improvement of Vehicle Lateral Stability
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 14 صفحه ای هست که در آن روابط مقاله + توضیح کدهای شبیه سازی + نتایج شبیه سازی آورده شده است.
دارای پاورپوینت 32 صفحه ای ساده هست.
گزارش شبیه سازی با متلب
چکیده مقاله:
در این مقاله بهبود همزمان مانورپذیري و پایداري جانبی یك خودروي چهارچرخ با استفاده از یك سيستم كنترلی فعال مقاوم پيشنهاد شده است.
سيستم كنترلی بر مبناي یك مدل ساده دیناميكی و براساس روش كنترل مود لغزش طراحی گردید. سيستم كنترلی فرمان فعال براي كاهش خطاي بين پاسخهاي واقعی و مطلوب به كار میرود.
در این سيستم كنترلی، متغيرهاي حالت تحت كنترل سرعت زاویه اي چرخشی و سرعت جانبی هستند كه به وسيله سيستم فرمان فعال كنترل میشوند.
همچنين یك مدل دیناميكی غيرخطی چهارده درجه آزادي خودروي چهارچرخ توسعه یافت و با استفاده از نرم افزار در مانور استاندارد صحه گذاري گردید.
عملكرد سيستم دیناميكی در حالت كنترل شده و بدون سيستم كنترلی در مانورهاي مختلف ارزیابی شده است.
نتایج شبيه سازي نشان میدهند كه سيستم كنترلی فرمان فعال نه تنها مانورپذیري خودرو را بهبود میدهد بلكه پایداري جانبی خودرو را در مانورهاي بحرانی كه ناپایداري شدیدي اتفاق میافتد، افزایش میدهد.
توضیحات پروژه
در این گزارش، به ارائه نکات مربوط به شبیه سازی کنترل حرکت عرضی خودرو در سه مانور پرداخته میشود.
نکته مهم: توضیحات مقاله در بسیاری از موارد (در فرمولها، مقادیر عددی پارامترها و …) ناقص بود و ناچار به استفاده از منابع دیگر در کنار مقاله اصلی شده ایم از این رو ممکن است نمودارها مقادیر اندکی با نتایج مقاله تفاوت داشته باشد. مقالات کمکی در فایل های پروژه موجود هستند.
معادلات دینامیکی جانبی خودرو
روابط مربوط به دینامیک عرضی خودرو با دو درجه آزادی در ادامه آورده شده است:
| (1) |
در این رابطه، همان Vy سرعت عرضی خودرو، r سرعت زاویهای چرخشی و ورودی انحراف فرمان میباشند.
پارامترهای موجود در (1) طبق (2) به دست میآیند:
| (2) | جهت حفظ حقوق معنوی اثر این رابطه در اینجا قابل مشاهده نیست |
در روابط فوق، Vx همان u (سرعت رو به جلو)، lf همان l1 و lr همان l2 در مقاله هستند.
این معادلات در دو حالت حل میشوند. یک حالت بدون استفاده از کنترل است که در آن انحراف فرمان از پیش داده شده است. حالت دوم استفاده از کنترلر (3) میباشد که در آن، ورودی انحراف فرمان توسط کنترلر به دست میآید:
| (3) | جهت حفظ حقوق معنوی اثر این رابطه در اینجا قابل مشاهده نیست |
در (3)، مشتق نرخ r مطلوب (از پیش تعیین شده) است. k یک مقدار ثابت و s از رابطه (4) به دست میآید:
| (4) | جهت حفظ حقوق معنوی اثر این رابطه در اینجا قابل مشاهده نیست |
این روابط برای سه مانور حل شده اند. مقادیر عددی پارامترهای سه مانور در جدول 1 آورده شده اند:
جدول 1
|
پارامتر |
مانور 1 (گردش حالت مانا) |
مانور 2 (Fishhook) |
مانور 3 (تعویض خط) |
|
l1 |
1.053 | 1.053 | 1.053 |
|
l2 |
1.559 | 1.559 | 1.559 |
| Cαf | 46800 | 46800 |
46800 |
|
Cαr |
50000 | 50000 |
50000 |
| m | 2250 | 2250 |
2250 |
|
Izz |
2249 | 2249 | 2249 |
| k | 0.01 | 0.01 |
0.01 |
| Vx | 70 km/hr | 100 km/hr |
80 km/hr |
نتایج مانور 1 (گردش حالت مانا)
نتایج مقاله و شبیه سازی در کنار یکدیگر قرار داده شدهاند. مشاهده میشود که نتایج شبیه سازی بسیار نزدیک به مقاله شده است و همانطور که پیشتر گفته شد مقادیر اختلافی که وجود دارد به دلیل توضیحات کم مقاله در مورد پارامترها است.
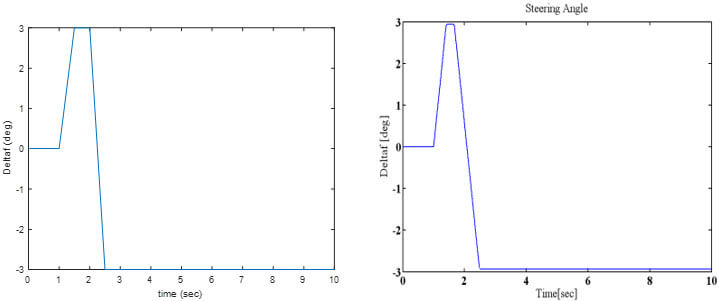
طبق مقاله، انحراف فرمان برای حالت بدون کنترل طبق مقاله در شکل 1 داده شده است:
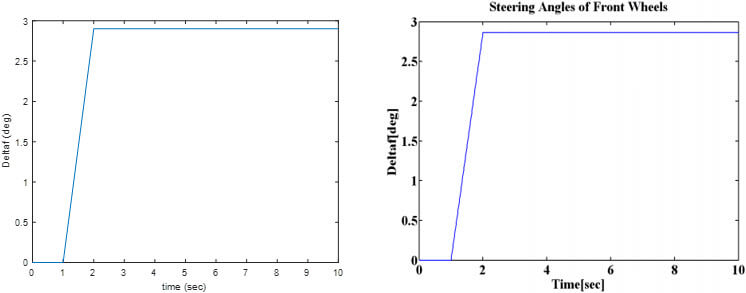
شکل 1 (راست: مقاله، چپ: شبیه سازی)
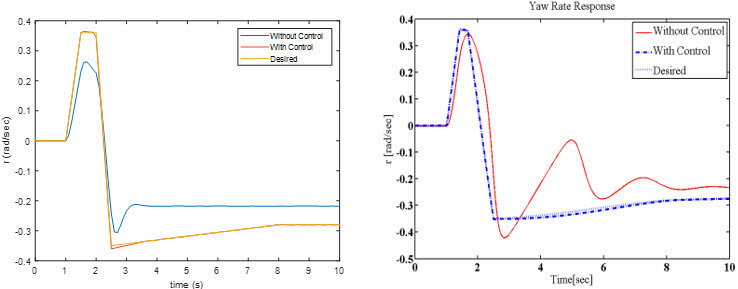
تغییرات r برای سه حالت بدون کنترل، با کنترل و مقدار مطلوب در شکل 2 نشان داده شده است. مشاهده میشود که در حالت با کنترل، مقادیر r بسیار منطبق بر مقادیر r مطلوب است:
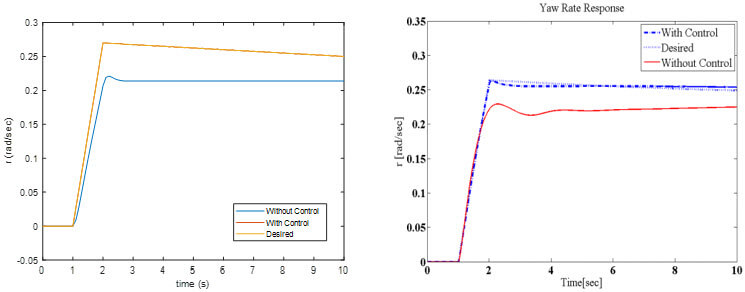
شکل 2 (راست: مقاله، چپ: شبیه سازی)
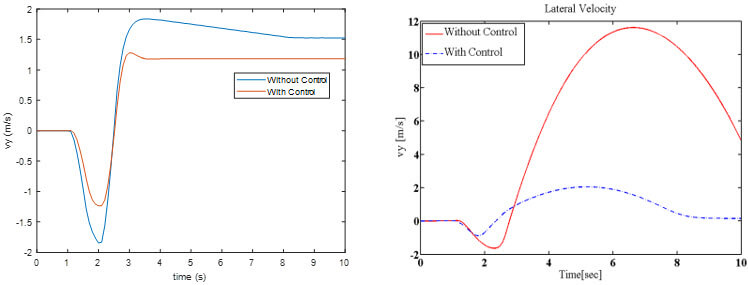
نتایج مربوط به سرعت جانبی (Vy) در شکل 3 نمایش داده شده است:
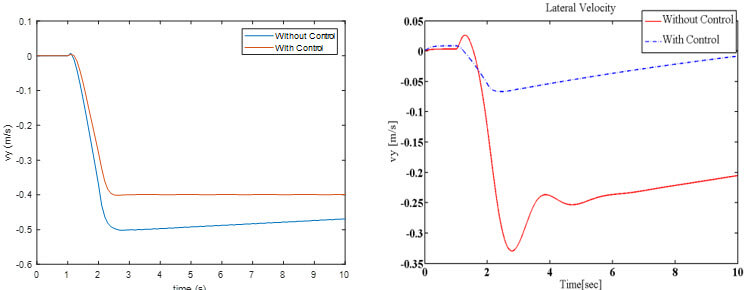
شکل 3 (راست: مقاله، چپ: شبیه سازی)
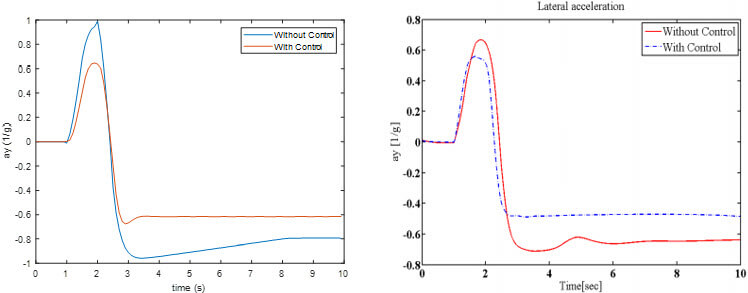
نتایج مربوط به شتاب جانبی (ay) در شکل 4 نمایش داده شده است:
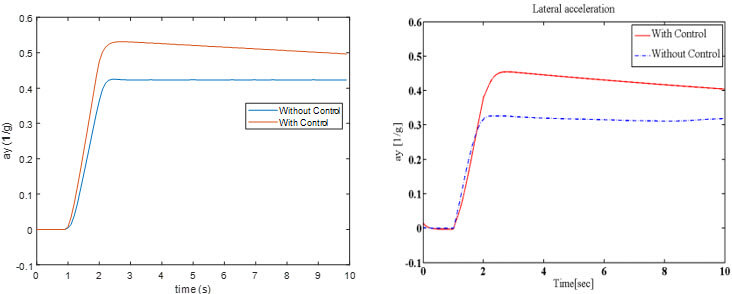
شکل 4 (راست: مقاله، چپ: شبیه سازی)
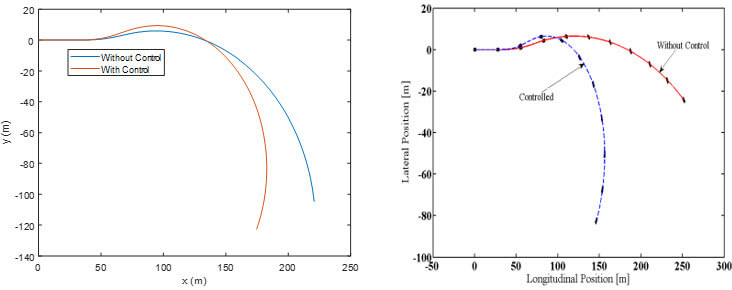
نمودار مربوط به مسیر طی شده خودرو در شکل 5 نشان داده شده است:
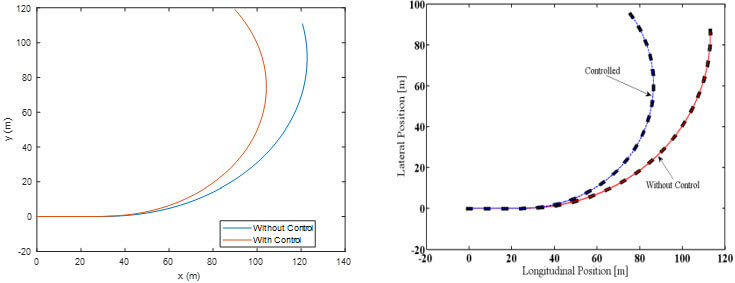
شکل 5 (راست: مقاله، چپ: شبیه سازی)
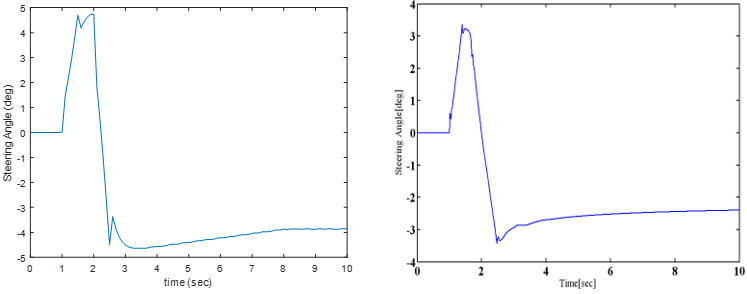
تغییرات مربوط به انحراف فرمان در حالت کنترل شده در شکل 6 نشان داده شده است:
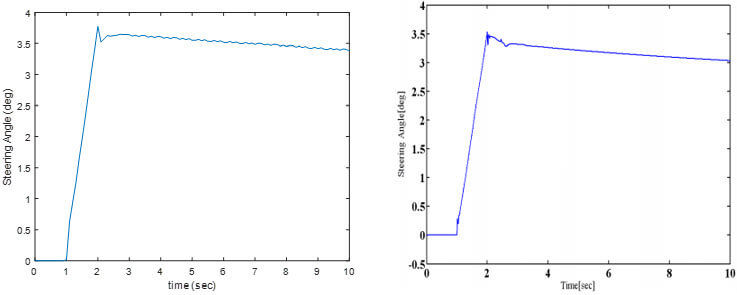
شکل 6 (راست: مقاله، چپ: شبیه سازی)
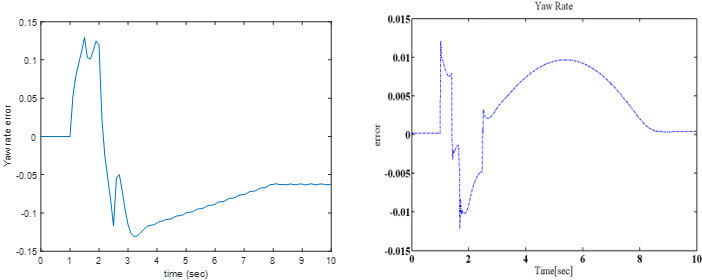
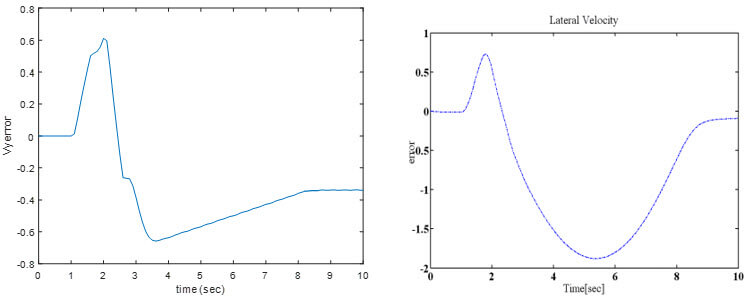
در نهایت، نتایج مربوط به خطای سرعت زاویه ای چرخشی و سرعت جانبی در دو شکل 7 و 8 نشان داده شده اند:
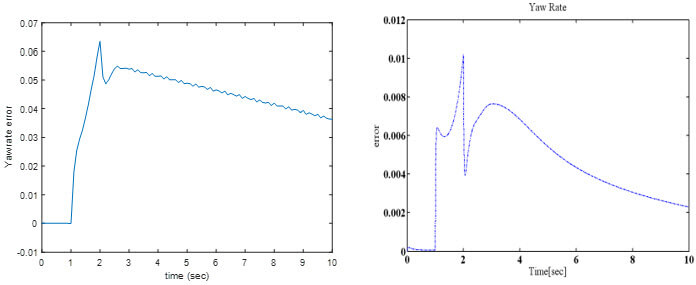
شکل 7 (راست: مقاله، چپ: شبیه سازی)
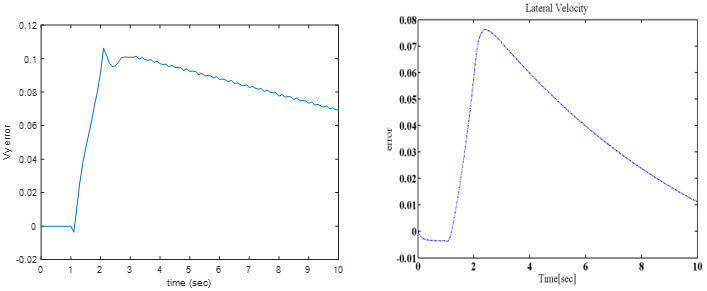
شکل 8 (راست: مقاله، چپ: شبیه سازی)
نتایج مانور 2 (Fishhook)
نتایج مقاله و شبیه سازی در کنار یکدیگر قرار داده شده اند. مشاهده میشود که نتایج شبیه سازی بسیار نزدیک به مقاله شده است و همانطور که پیشتر گفته شد مقادیر اختلافی که وجود دارد به دلیل توضیحات کم مقاله در مورد پارامترها است.
انجام پروژه متلب با سایت متلبی
طبق مقاله، انحراف فرمان برای حالت بدون کنترل طبق مقاله در شکل 9 داده شده است:
شکل 9 (راست: مقاله، چپ: شبیه سازی)
تغییرات r برای سه حالت بدون کنترل، با کنترل و مقدار مطلوب در شکل 10 نشان داده شده است. مشاهده میشود که در حالت با کنترل، مقادیر r بسیار منطبق بر مقادیر r مطلوب است:
شکل 10 (راست: مقاله، چپ: شبیه سازی)
نتایج مربوط به سرعت جانبی (Vy) در شکل 11 نمایش داده شده است (دقت نمایید برای نمودار قرمز داخل مقاله نویسنده اشتباه کرده و سرعت را 100 متر بر ثانیه به جای 100 کیلومتر بر ثانیه در نظر گرفته است. با اصلاح سرعت، مقادیر نمودار قرمز مقاله در محدوده شبیهسازی خواهد شد):
شکل 11 (راست: مقاله، چپ: شبیه سازی)
نتایج مربوط به شتاب جانبی (ay) در شکل 12 نمایش داده شده است:
شکل 12 (راست: مقاله، چپ: شبیه سازی)
نمودار مربوط به مسیر طی شده خودرو در شکل 13 نشان داده شده است:
شکل 13 (راست: مقاله، چپ: شبیه سازی)
تغییرات مربوط به انحراف فرمان در حالت کنترل شده در شکل 14 نشان داده شده است:
شکل 14 (راست: مقاله، چپ: شبیه سازی)
در نهایت، نتایج مربوط به خطای سرعت زاویه ای چرخشی و سرعت جانبی در دو شکل 15 و 16 نشان داده شده اند:
شکل 15 (راست: مقاله، چپ: شبیه سازی)
شکل 16 (راست: مقاله، چپ: شبیه سازی)
نتایج مانور 3 (تعویض خط)
نتایج مانور 3 نیز با دقتی که در نتایج فوق مشاهده می نمایید شبیه سازی و در گزارش ورد آمده است.
توضیحات کدها در گزارش کار آمده است.
کلیدواژه:
مدل دیناميكی 14درجه آزادی, مانورپذیری, كنترل مقاوم, تحليل پایداری
14 DOF Dynamic Model, Maneuverability, Robust Control, Stability Analysis
شبیه سازی يك سيستم كنترل غيرخطی فرمان فعال برای افزايش پايداری جانبي خودرو
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.