توضیحات
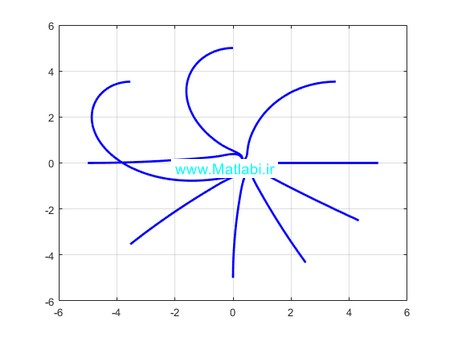
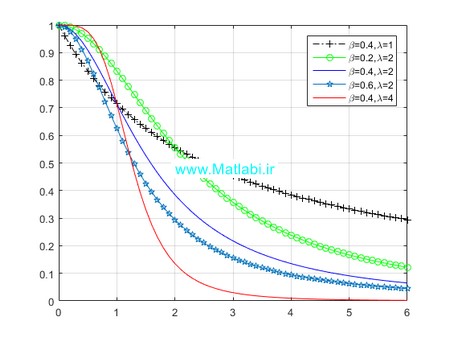
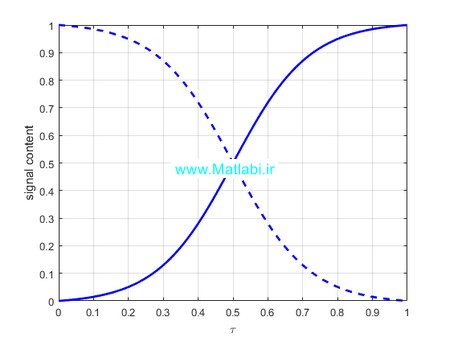
A Smooth Control Law for Graceful Motion of Differential Wheeled Mobile Robots in 2D Environment
یک قانون کنترل صاف برای حرکت برانگیز روبات های مختلف دیفرانسیل چرخ دار در محیط 2D
شبیه سازی در محیط ام فایل و سیمولینک متلب 2015b انجام شده است.
دارای گزارش مختصر است.
فایل های شبیه سازی به شرح زیر است:
- فایل controller.m سیستم کنترل را پیاده سازی می کند.
- فایل main.m فایل اصلی شبیه سازی است.
- فایل MobileRobotModel.m مدل ربات را پیاده سازی می کند.
- فایل سیمولینک MobileRobot.slx سیستم حلقه بسته را پیاده سازی می کند.
- فایل سیمولینک MobileRobot_z.slx جهت محاسبه z استفاده شده است.
نتایج شبیه سازی با متلب
کلیدواژه:
Vehicles, Mobile robots, Trajectory, Angular velocity, Navigation, Acceleration
شبیه سازی
A Smooth Control Law for Graceful Motion of Differential Wheeled Mobile Robots in 2D Environment
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.