توضیحات
Application of fuzzy inference systems to detection of faults in wireless sensor networks
آشکارسازی خطا در شبکه های سنسوری وایرلس
هدف از این مقاله ارائه یک روش آشکارسازی خطا در شبکه های سنسوری وایرلس است.
این روش بر مبنای مدل کردن گره سنسوری توسط سیستم FIS است که در آن هر اندازه گیری از گره توسط تابعی از اندازهگیریهای بدست آمده از همسایگی های آن سنسور بدست می آید.
همچنین روشی دیگری پیشنهاد میشود که این روش مبنی بر Recurrent FIS است که در آن علاوه بر مقادیر اندازهگیری شده توسط همسایگیهای گره مرجع، نمونه های قبلی بدست آمده از آن گره نیز دخالت دارند.
در ادامه نتایج شبیه سازی برای این دو روش پیشنهادی با الگوریتم های دیگر مقایسه میشود.
نتایج نشان میدهد که دقت این روش به مراتب بهتر از روش شبکه های عصبی و روش میانه است.
در ادامه نتایج شبیه سازی به ازای روش های FIS، روش NN و روش Median ارائه میشود.
همچنین در انتها دو روش Recurrent FIS و Recurrent NN را بررسی میکنیم.
برنامه Fig7:
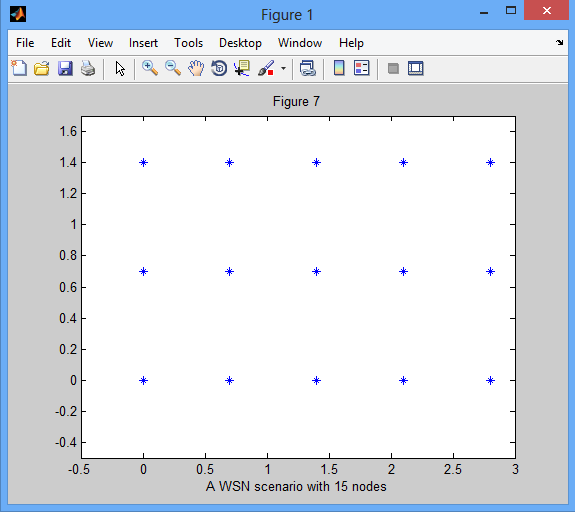
ابتدا یک شبیه سنسوری مشابه شکل 7 مقاله تشکیل میدهیم.
این شبکه شامل 15 سنسور است که به فاصله 0.7 در دو جهت x و y از هم قرار گرفته اند.
برنامهای Fig7 به این شبیهسازی اختصاص دارد که با تشکیل مختصات x و y به فاصله های یکسان یک شبکه سنسوری را نشان میدهد.
خروجی برنامه Fig7.m در شکل زیر نشان داده شده است.
…
فانکشن Temp:
کمیتی که در مقاله مورد بررسی قرار گرفته است دما است.
در رابطه (19) دمای هر سنسور بصورت تابعی از مختصات سنسور و زمان نشان داده شده است.
به منظور محاسبه دما تابعی بعنوان Temp در نظر گرفته شده است.
در برنامه Temp ابتدا دمای تمام سنسورها محاسبه میشود، سپس فاصله بین آنها تعیین میشود و با انتخاب ، همسایگی گره بدست می آید. میتوان مقدار را در برنامه تغییر داد.
در تمام مقاله گره مورد بررسی گره A6 است که دارای 5 همسایگی میباشد: A1,A2,A7,A11,A12. این همسایگی محاسبه میشود و به همراه دمای A6 بعنوان خروجی داده میشوند.
…
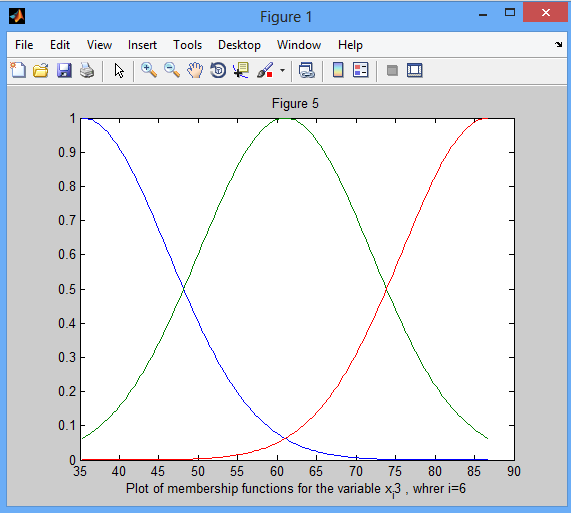
برنامه Fig5:
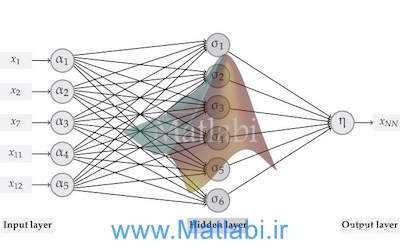
در پیادهسازی الگوریتم FIS برای هر گره یک تابع عضویت در نظر گرفته میشود که بر اساس آن مقدار خروجی در حالت فازی محاسبه میشود.
این تابع عضویت میتوان شامل چندین حالت باشد که هر حالت متناسب با مقدار ورودی تابع است برای مثال اگر بازه ورودی را به 5 مقدار بسیار کوچک، کوچک، متوسط، بزرگ، خیلی بزرگ تقسیم کنیم هر تابع عضویت شامل 5 نمودار است.
در مقاله گفته شده که نوع تابع فعال گوسی باشد که در خط 7 از برنامه Fig5 این کمیت به گوسی ست شده است.
خروجی این برنامه به ازای همسایه سوم یعنی A7 در شکل 2 نشان داده شده است.
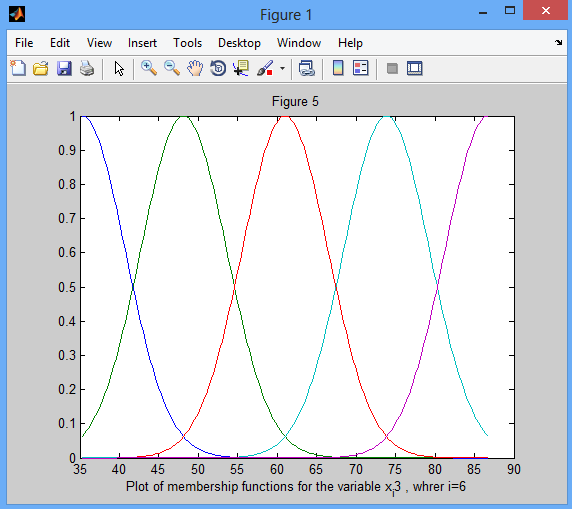
شکل 2: تابع عضویت برای متغیر با فرض اینکه باشد.
برنامه Fig8:
در برنامه Fig8 شکل 8 مقاله شبیه سازی شده است.
ابتدا اطلاعات اولیه از شبیه سازی های قبلی را فراخوانی میکنیم.
سپس محیط FIS شبیه سازی شده را با داده ها مساله یعنی همسایه های A6 آموزش میدهیم.
در واقع هر ستون دیتای آموزشی برابر با یک بردار 5 مولفه است که این بردار 5 مولفه ای دماهای لحظه k-ام سنسورهای A1،A2 ،A7 ،A11 و A12 میباشند پس بردار train یک بردار 100*5 است.
چون تعداد تابع عوضیت 5 انتخاب شده است پس 5^5 عبارت تصمیم گیری داریم که عملا اجرای ان در PC های معمولی ممکن نیست و بسیار زمانبر است. حتی با مشکلات مثل کمبود حافظه مواجه میشویم.
در شبیه سازی ها حتی به ازای 4 نیز نیز این مشکل وجود دارد.
بنابراین ما در شبیه سازی ها از 3 همسایگی به منظور تقریب دمای اندازهگیری شده در گره A6 استفاده میکنیم.
به منظور شبیه سازی شبکه عصبی از دستور feedforwardnet استفاده میکنیم.
در مقاله تعداد نورونهای لایه مخفی 6 و تعداد ورودیها نیز 5 انتخاب شده است. همچنین تابع activation از نوع logsig (مطابق با مقاله) انتخاب شده است.
در پایان شبکه با دادههای آموزشی،train میشود و نتیجه به عنوان خروجی NN ذخیره میشود.
در این شکل از روش median نیز استفاده شده است که این روش به سادگی یا دستور median پیاده سازی میشود.
خروجی برنامه به شرح زیر میباشد.
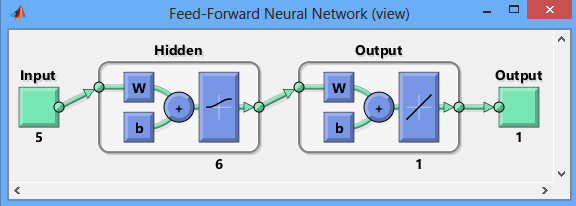
شکل 3: شبکه عصبی پیاده سازی شده در مقاله
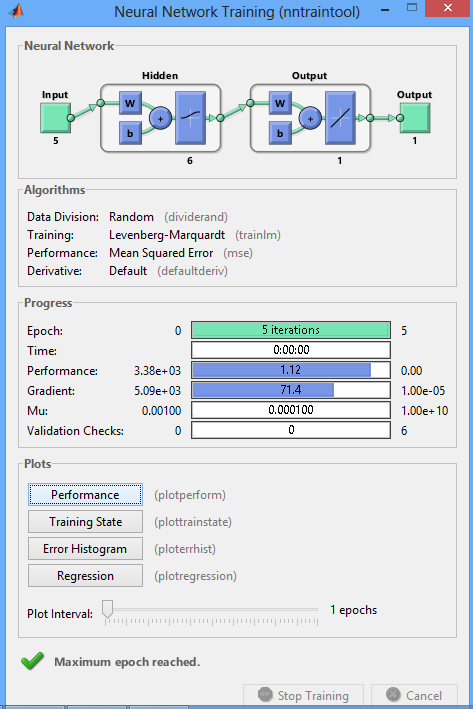
شکل 4: اموزشی شبکه عصبی با انتخاب بردار همسایگی بعنوان ورودی شبکه
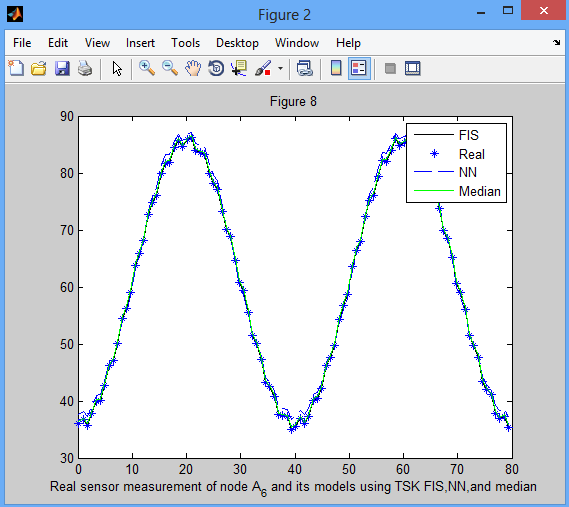
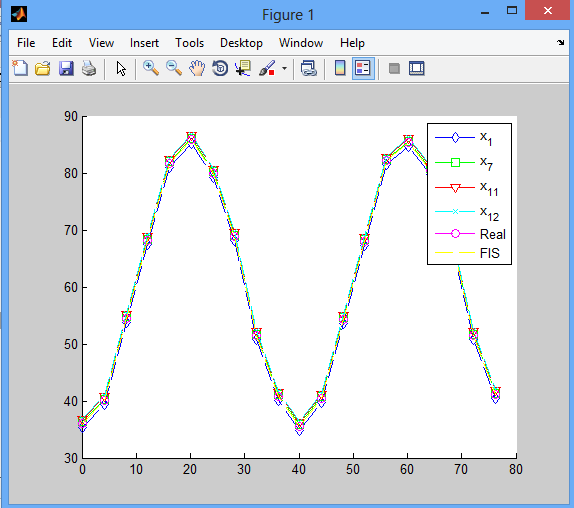
شکل 5: مقدار اندازه گیری شده گره 6 و مدلهای پیشنهادی با سه روش FIS، Median و NN (مطابق با شکل 8 مقاله)
Fig9_Fig10:
این برنامه شکل 9 و 10 مقاله را شبیه سازی میکند.
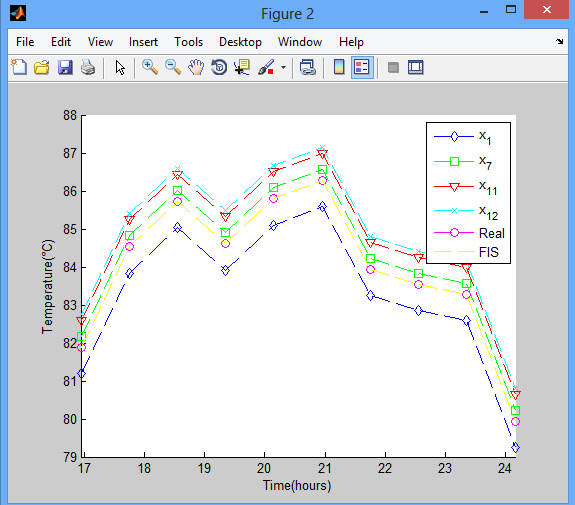
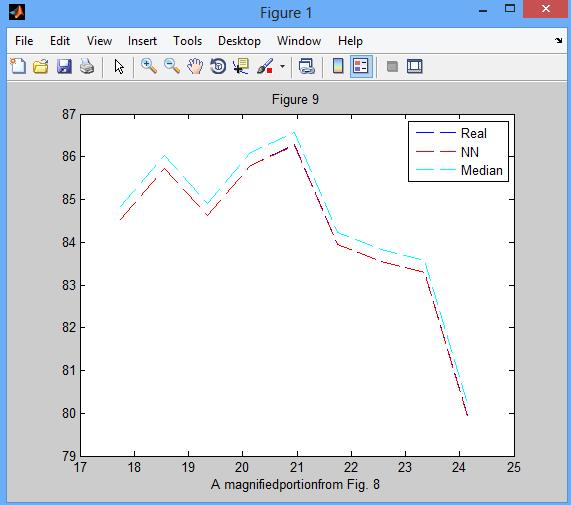
در شکل 8 مقاله (شکل 5 گزارش) چندان تفاوتی بین نتایج مشاهده نمیشود پس با زوم کردن یک ناحیه مشخص میتوان تفاوت الگوریتمها ملاحظه کرد. در شکل قبلی میتوان این تفاوتها را ملاحظه کرد.
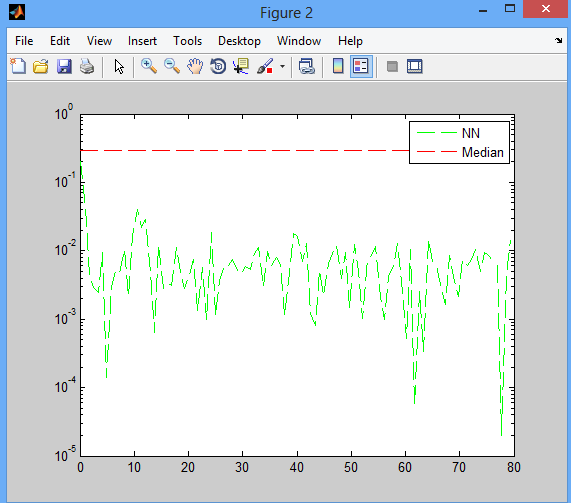
در شکل 6 بخش زوم شده شکل بالا آورده شده است. همچنین قدرمطلق اختلاف هر مدل نسبت به مقدار واقعی بصورت تابعی از زمان در شکل 7 آورده شده است.
به منظور بهتر نمایش دادن مقادیر محور عمودی بر حسب log میباشد:
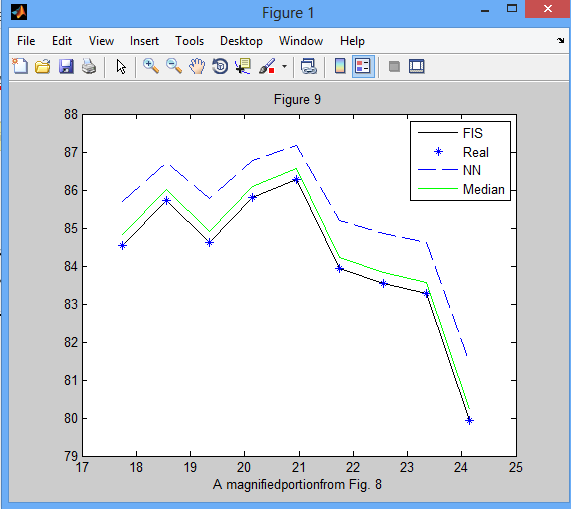
شکل 6: زوم شده شکل 5 گزارش معادل با شکل 8 مقاله
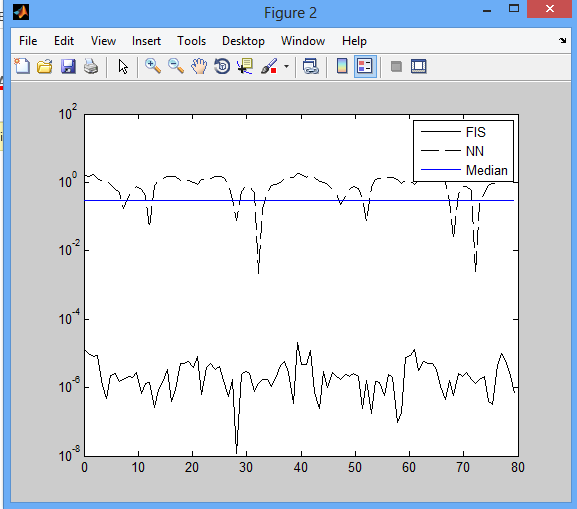
شکل 7: اختلاف بین مدلهای FIS ، NN و Median با مقدار اندازهگیری شده واقعی
Fig11_12:
در شکل زیر مقدار اندازه گیری شده در حضور خطا و مقدار بدست آمده از روش FIS نشان داده شده است.
همانطور که ملاحظه میشود تا قبل از 10 ساعت مقدار FIS بر روی مقدار اندازه گیری شده منطبق است اما پس از آن با گذشت زمان بین دو نموداز اختلاف میافتد.
چون مقدار e(t) متناسب با t زیاد میشود پس با گذشت زمان این اختلاف محسوس تر میشود.
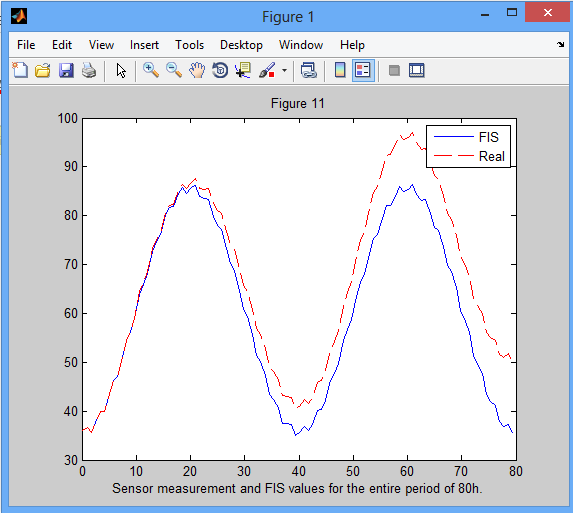
شکل 8: مقادیر اندازهگیری سنسور و FIS در طول بازه زمانی 80 ساعته
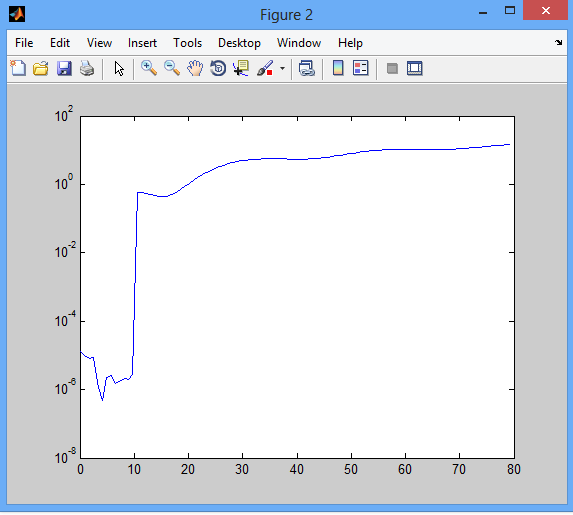
شکل 9: اختلاف بین مقدار واقعی و مقدار بدست آمده از FIS (مطابق با شکل 12 مقاله)
برنامه Fig13:
در این برنامه روند شبیهسازی مدل های FIS به ازای انتخاب همسایگیهای مختلف بررسی شده است.
ابتدای یک مقدار اعوجاج مطابق با رابطه (22) مقاله به هر بردار دما اضافه شده است و سپس به ترتیب با در نظر گرفتن خطا برای 1، 2، 3 و 4 همسایگی مدل FIS پیاده سازی شده است.
طبق توضیحات قبلی نمیتوان حالت 4 را بررس کرد و به همین دلیل در شبیهسازی تنها 3 حالت اول را بررسی کرده ایم.
در هر شکل متوسط خطا، مینیمم خط و ماکزیمم اختلاف بین مقدار واقعی و مقدار شبیه سازی شده نشان داده شده است.
نتایج نشان میدهد که با افزایش مولفههایی که دچار خطا میشوند متوسط اختلاف بین مقادیر واقعی و مقادیر بدست آمده بصورت تقریبی، افزایش مییابد.
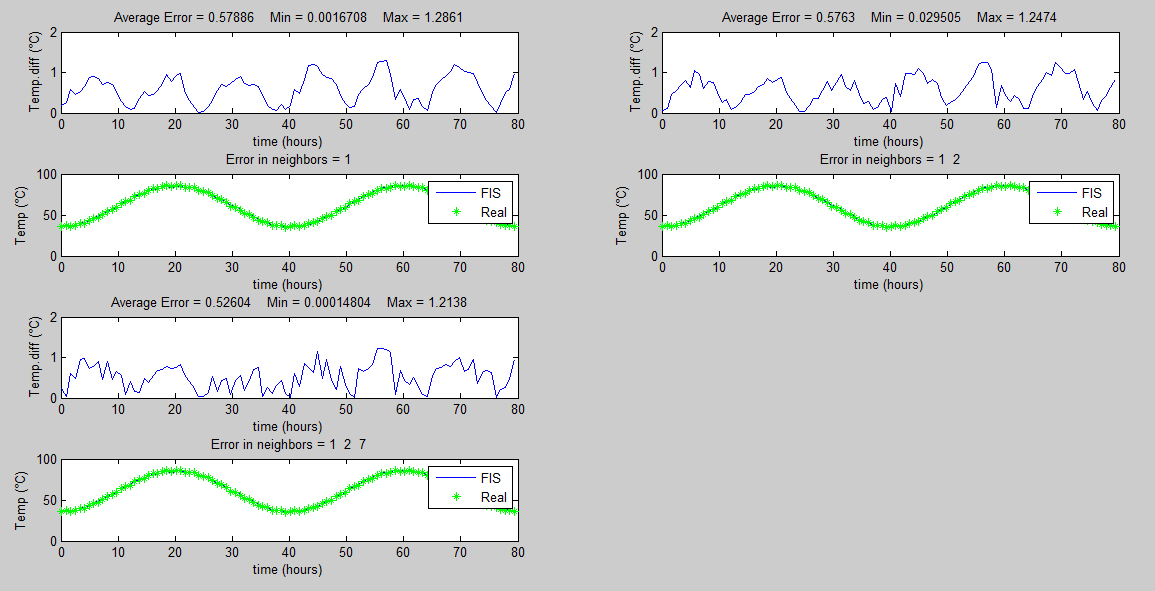
شکل 10 (شکل 13 مقاله): به ازای خطا با دامنه حداکثر 1
برنامه Fig14:
این برنامه مشابه با برنامه Fig13 است با این تفاوت که تنها دامنه خطا میتواند تا 2 افزایش پیدا کند. یعنی ضریب EB در رابطه (22) مقاله.
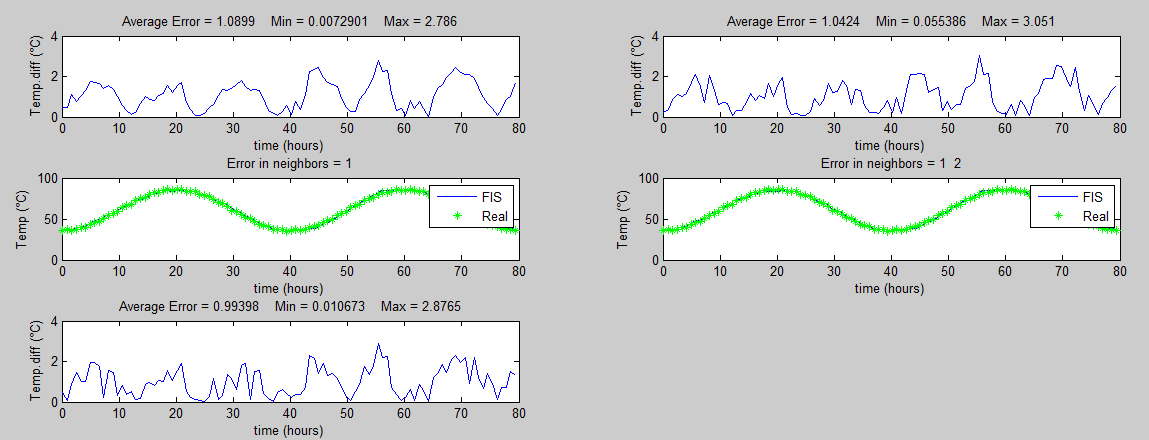
شکل 11 (شکل 14 مقاله): به ازای خطا با دامنه حداکثر 2
برنامه Fig15_Fig16:
شکل 13: مقایسه مقادیر سنسورهای همسایه با مقدار واقعی سنسور 6 و نتایج بدست آمده از الگوریتم FIS
شکل 14: زوم شده تصویر 13
برنامه Fig17:
در این برنامه تابع عضویت در حالتی که برای هر ورودی 3 تابع گوسی در نظر گرفته شود نشان داده میشود:
شکل 15: تابع عضویت همسایه سوم از گره 6-ام که شامل 3 تابع عضویت گوسی است (مطابق با شکل 17 مقاله)
برنامه Fig18:
در این برنامه الگوریتم RNN و RFIS پیاده سازی میشود و نتایج با هم مقایسه میشود.
در شکل 6، نتایج بدون حضور خطا نشان داده شده است که مجددا الگوریتم FIS نسبت به الگوریتم NN نتیجه بهتری دارد.
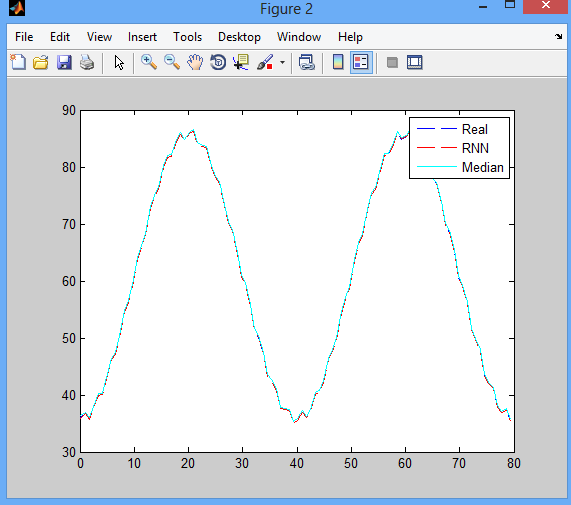
شکل 16: مطابق با شکل 18 مقاله. مقایسه نتیجه واقعی اندازه گیری شده و نتایج تقریبی با RNN و RFIS وMedian
برنامه Fig19_Fig20:
در این برنامه بخشی از نتیجه شکل بالا زوم میشود و همچنین اختلاف بین مقادیر تقریبی و مقدار واقعی نشان داده میشود. مقباسهای بر حسب لگاریتمی هستند تا تفاوت بین آنها محسوس باشد.
در شکل 17، بخش میانی شکل 16 زوم شده است و در شکل 17؛ اختلاف بین مقادیر تقریبی و مقادیر اندازهگیری شده در واحد لگاریتمی نشان داده شده است.
شکل 17: مطابق با شکل 19 مقاله بخش زوم شده شکل قبلی
شکل 18: اختلاف بین مقادیر اندازه گیری شده و مقدار واقعی
نتیجه گیری:
در این مقاله دو روش به منظور مدل کردن بر مبنای FIS به منظور تشخیص خطا پیشنهاد شد که نتایج شبیهسازی نشان میدهد که اختلاف مقدار تخمین زده شده از این الگوریتم ها نسبت به الگوریتم شبکههای عصبی و الگوریتم میانه Median به مراتب بهتر است. همچنین نشان داده شد که الگوریتم Recurrent FIS نسبت به FIS عملکرد بهتری دارد.
کلید واژه : گراف ارتباطی یک WSN بصورت گراف، مدل کردن بر مبنای FIS به منظور تشخیص خطا,پروژه متلب,شبیه سازی با متلب,matlab project,پروژه matlab,پروژه های آماده متلب,Wireless sensor networks, Fault detection, Fuzzy inference systems, Neural networks, Distributed scheme
شبیه سازی مقاله
Application of fuzzy inference systems to detection of faults in wireless sensor networks
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.