توضیحات
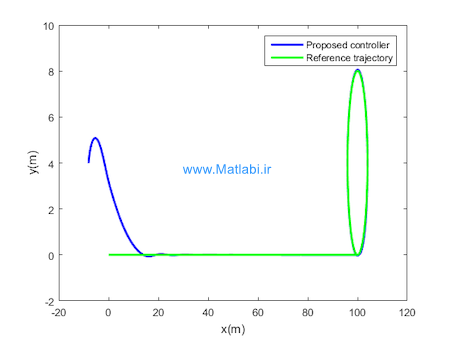
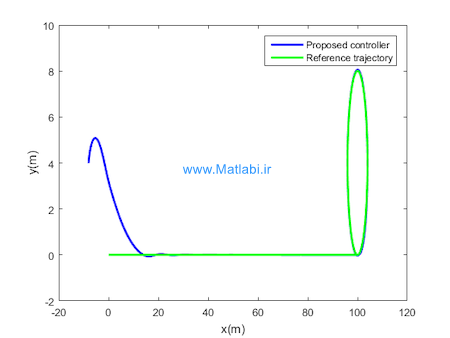
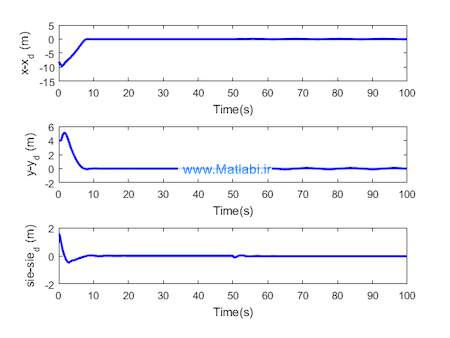
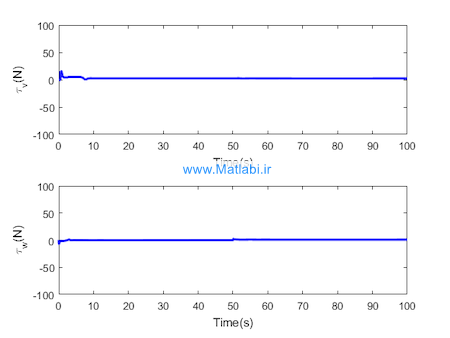
Robust neural network–based tracking control and stabilization of a wheeled mobile robot with input saturation
شبیه سازی در محیط سیمولینک و ام فایل متلب پیاده سازی شده است.
دارای یک صفحه گزارش است.
فایل های تهیه شده به شرح زیر است:
1- فایل main.m که با اجرای آن کلیه فایل های شبیه سازی اجرا شده و نتایج شبیه سازی ترسیم می شوند.
2- فایل WMRMODEL.m که جهت مدل سازی ربات استفاده شده است.
3- فایل DynamicController.m جهت پیاده سازی بخش دینامیکی کنترل کننده
4- فایل KinematicController.m جهت پیاده سازی بخش سینماتیکی کنترل کننده
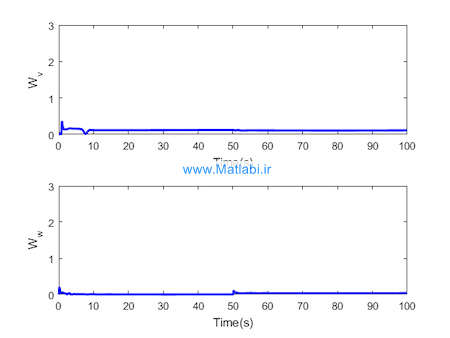
5- فایل W_T_V جهت پیاده سازی رابطه v
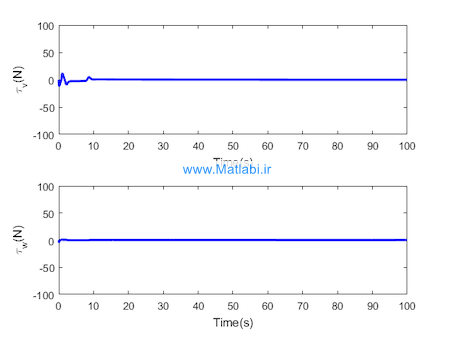
6- فایل Torque.m جهت تبدیل گشتاورهای خروجی کنترل کننده به گشتاورهای اعمالی به سیستم
7- فایل NNEstimator.m جهت پیاده سازی شبکه عصبی
8- فایل Dist.m جهت تبدیل گشتاورهای مدل به گشتاورهای اصلی
9- فایل های سیمولینک جهت پیاده سازی سناریوهای مختلف شبیه سازی
تذکر 1: در رابطه 3 مقاله یک منفی در المان 2-2 ماتریس جا افتاده است. با مرجع 35 مقایسه کنید.
تذکر 2: اطلاعات بخش شبکه عصبی در شبیه سازی کامل نیست. بنابراین از پارامترهای دلخواه استفاده شده و به همین دلیل برخی از شکل ها تفاوت جزئی دارند.
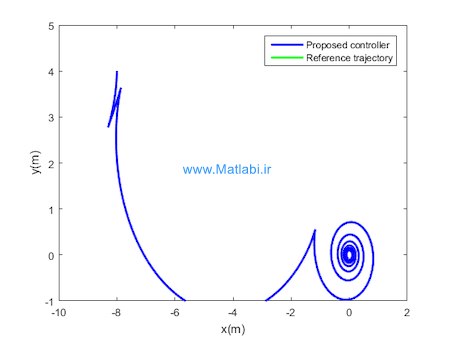
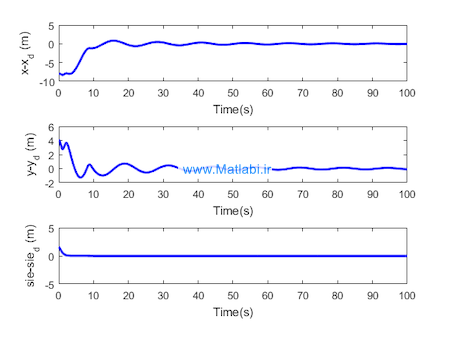
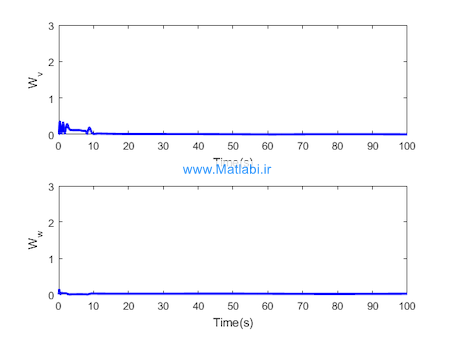
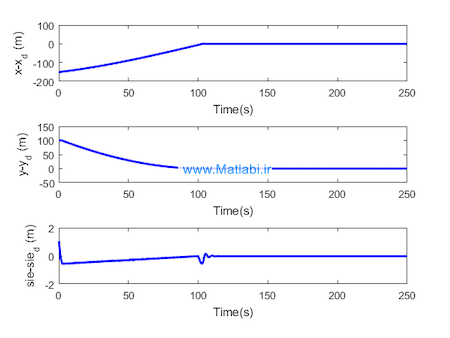
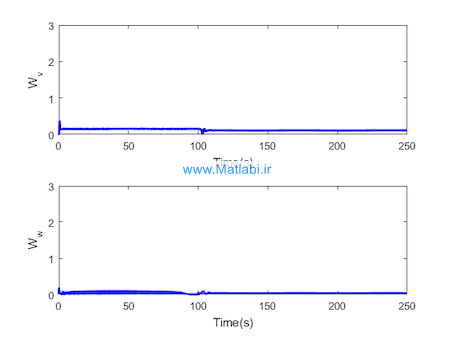
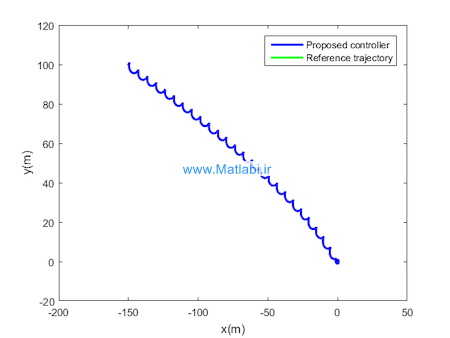
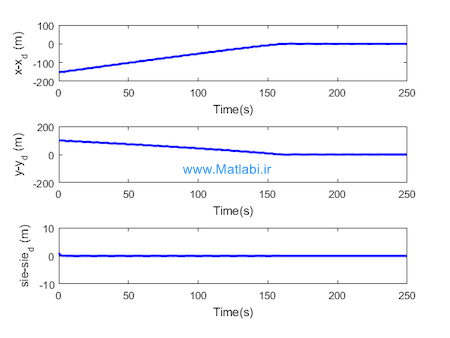
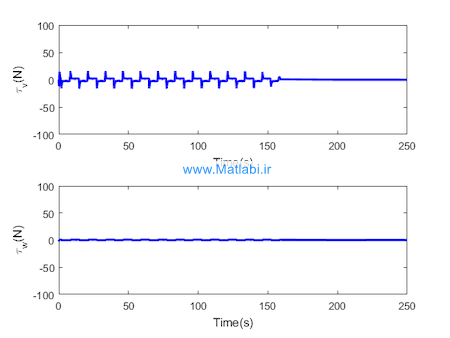
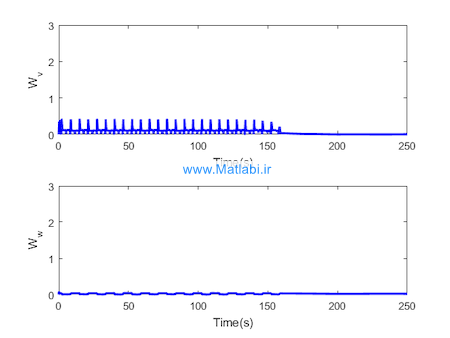
نتایج شبیه سازی با متلب


- انجام پروژه شبکه عصبی با متلبی
کلیدواژه:
neural network, robust control, stabilization, tracking control, wheeled mobile robot
شبیه سازی
Robust neural network–based tracking control and stabilization of a wheeled mobile robot with input saturation
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.