توضیحات
Robust MPC for tracking constrained unicycle robots with additive disturbances
شبیه سازی در محیط سیمولینک و ام فایل متلب تهیه شده است.
دارای گزارش 4 صفحه ای است که در آن توضیحاتی در مورد ام فایل های متلب است.
فایل های تهیه شده به نحو زیر است:
1- فایل Main.m که با اجرای آن روشهای Tube MPC و NRMPC شبیه سازی شده و نتایج ترسیم می شوند. توجه شود اجرای این فایل ممکن است حدود 30 دقیقه زمان ببرد.
2- فایل UniCycleRobotModel.m جهت پیاده سازی مدت ربات
3- فایل Error جهت پیاده سازی بخشی از کنترل کننده
4- فایل های TUBE_MPC.m و NRMPC_MPC.m جهت پیاده سازی دو روش کنترل
5 – فایل های سیمولینک جهت پیاده سازی حلقه بسته دو روش
6- فایل TUBE_MPC_OBJ.m جهت پیاده سازی تابع هزینه TUBE MPC
7- فایل NRMPC_MPC.m جهت پیاده سازی تابع هزینه NRMPC MPC
8- فایل TUBE_MPC_CONSTRAINT.m جهت پیاده سازی قید های روش TUBE MPC
9- فایل NRMPC_MPC_CONSTRAINT.m جهت پیاده سازی قیدهای روش NRMPC MPC
فایل ها در متلب 2015 نسخه b آماده شده اند.
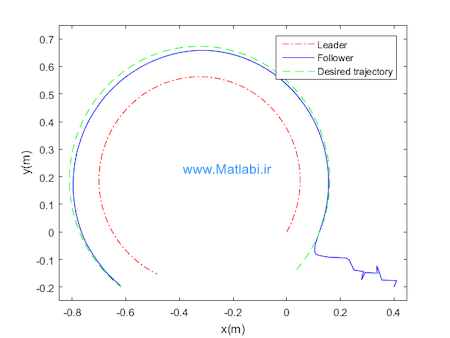
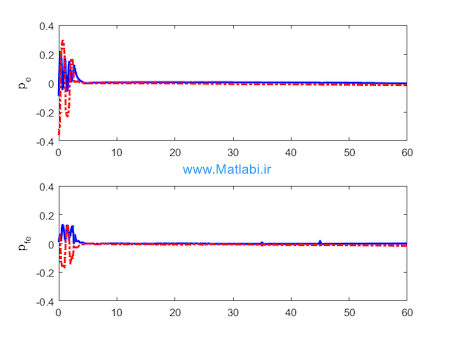
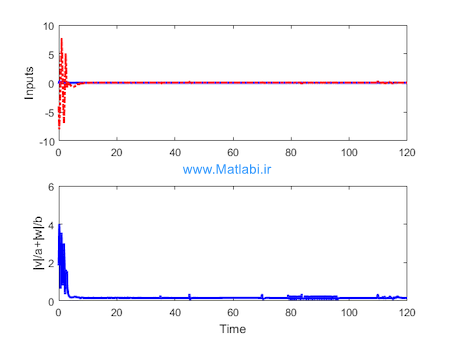
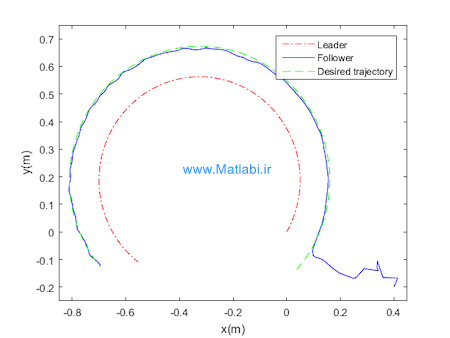
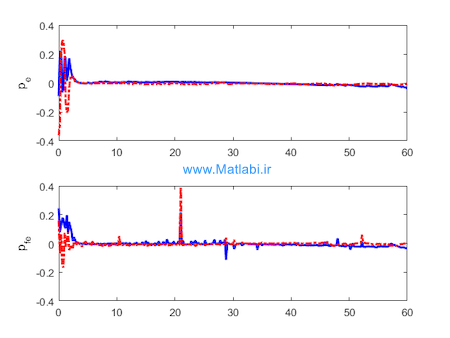
نتایج شبیه سازی با متلب
کلیدواژه:
Robust control, Model predictive control (MPC), Unicycle robots, Bounded disturbances
شبیه سازی
Robust MPC for tracking constrained unicycle robots with additive disturbances
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.