توضیحات
تشخیص محل دقیق خطا در خطوط انتقال با الگوریتم مورچگان با استفاده از متلب
مقاله Accurate and comprehensive fault location algorithm for two-terminal transmission lines
تشخیص محل دقیق خطا در خطوط انتقال را با الگوریتم tlbo انجام داده است. و این محصول شبیه سازی همین مقاله با الگوریتم مورچگان است.
در این پروژه تعیین محل دقیق خطا در خطوط انتقال برای خطوط تکفاز و سه فاز با الگوریتم بهینه سازی مورچگان ACO انجام شده است.
گزارش کار کامل این پروژه, شامل توضیح در مورد برنامه متلب و نتایج بدست آمده است.
ابتدا تعیین محل خطا در خط تکفاز را بررسی می کنیم.
سپس به تعیین محل خطا در خط سه فاز خواهیم پرداخت.
توضیحات کلی
شبیه سازی بر اساس مقاله و برای مکانیابی خطا در خطوط تکفاز و سه فاز با استفاده از الگوریتم مورچگان (ACO) انجام شدهاست.
شبیهسازی با استفاده از نرمافزار Matlab 2017 انجام شده است.
توضیحات مربوط به فایل سیمولینک Sim_SinglePhase
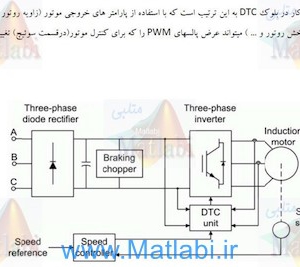
همانطور که توضیح دادهشد، این فایل سیمولینک مربوط به شبیهسازی خط انتقال تکفاز میباشد.
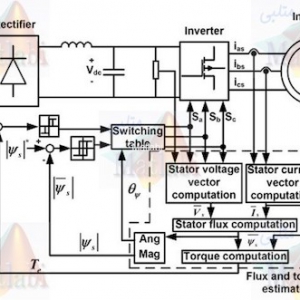
ساختار این شبیهسازی در شکل 1 نشان داده شده است.
پارامترهای سیستم شامل طول خط انتقال، پارامترهای خط و ولتاژ نامی سیستم مشابه مقاله درنظر گرفته شدهاست.
بنابراین طول خط انتقال 300 کیلومتر، ولتاژ نامی منابع 245 کیلوولت و همچنین پارامترهای خط به صورت R=0.0275 ohm/km، L=1.0028 mH/km و C=13 nF/km درنظر گرفته شدهاست.
همانند مقاله اختلاف فاز بین دو منبع ولتاژ نیز 20 درجه تنظیم شده است.
همانطور که در شکل 1 مشخص است، خط انتقال به دو قسمت L1 و L2 تقسیمبندی شده و در بین این دو قسمت یک بلوک خطا (Fault) برای شبیهسازی خطا قرار داده شدهاست. طول L1 معادل فاصله خطا از ترمینال S با همان d بوده و طول L2 نیز معادل فاصله خطا از ترمینال R یا همان dr میباشد.
این شکل در اینجا نیامده و با خرید این محصول فایل سیمولینک و گزارش کامل قابل دریافت است.
شکل 1. خط انتقال تکفاز شبیهسازی شده در سیمولینک متلب به همراه خطا
توضیحات کدنویسی الگوریتم مورچگان
به طور کلی الگوریتم ابتدایی مورچگان که به اختصار با ACO نشان داده میشود برای حل مسائل گسسته ارائه شده است.
با این وجود، برخی از انواع ACO نیز برای حل مسائل پیوسته (مانند مسئله مورد نظر ما) ارائه شدهاست.
یکی از این الگوریتمها، الگوریتم مورچگان برای فضای پیوسته (ACOR) نامیده میشود که توسط Socha در سال 2008 ارائه شده است.
مقالهای که در آن الگوریتم مورچگان پیوسته ارائه شده است به همراه این فایل و با نام Paper_ACO ارسال شدهاست.
کدنویسی الگوریتم مورچگان بر اساس این مقاله انجام شده و در بالای بخشهای اصلی کد نوشته شدهاست که مربوط به کدام یک از روابط مقاله میباشد.
کدنویسی در سه m فایل انجام شدهاست که این فایلها عبارتند از:
الف) کد ACO: این کدنویسی حاوی کد اصلی الگوریتم مورچگان پیوسته میباشد که بر اساس مقاله Paper_ACO نوشته شدهاست.
ب) کد fitness: این کدنویسی برای محاسبه مقدار برازندگی یا تابع هزینه هر یک از مورچهها نوشته شدهاست.
این کد به صورت تابع نوشته شدهاست که ورودی آن موقعیت یک مورچه یه به عبارت دیگر متغیرهای تصمیم مسئله (متغیرهایی که به دنبال بهینهسازی آنها هستیم) بوده و خروجی آن مقدار هزینه این پاسخ میباشد.
ج) کد RouletteWheelSelection: این کدنویسی حاوی کد انتخاب چرخ رولت میباشد که برای انتخاب تصادفی مورچهها مورد استفاده قرار میگیرد.
این کد در بسیاری از الگوریتمها نظیر الگوریتم ژنتیک برای انتخابهای تصادفی مورد استفاده قرار میگیرد.
ورودی این مسئله مقدار هزینه مورچگان بوده و خروجی آن، شماره یکی از مورچهها میباشد که به صورت تصادفی انتخاب شدهاست.
در این کد، مورچهای که مقدار تابع هزینه آن کوچکتر باشد( برازندگی بیشتری داشته باشد) شانس بالاتری برای انتخاب شدن دارد.
استخراج نتایج شبیهسازی
برای ران کردن شبیهسازی، بعد از تنظیم مشخصات خطا شامل فاصله خطا (L1)، مقاومت خطا (Rf) و زاویه فاز وقوع خطا (Phi) در کد ACO، تنها کافی است کد ACO ران شود.
با ران کردن ACO فرآیند مکانیابی خطا (بهینهسازی) شروع شده و در هر مرحله تکرار الگوریتم، شماره تکرار و کمترین هزینه بدست آمده تا آن تکرار نمایش داده میشود.
در نهایت بعد از پایان بهینهسازی، منحنی همگرایی و جدول نتایج نمایش داده میشود.
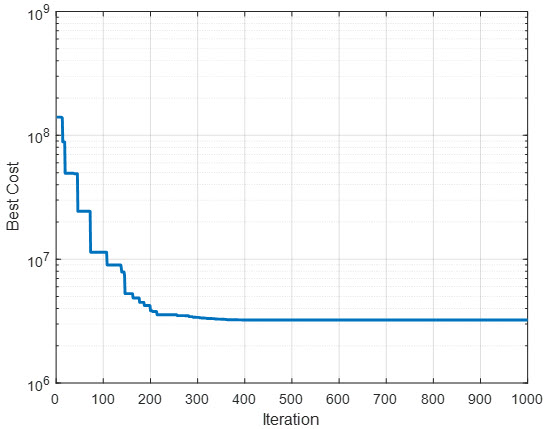
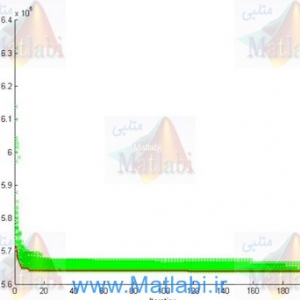
به عنوان مثال، برای وقوع خطا در 175 کیلومتری ترمینال S (یعنی L1=175)، مقاومت خطای 10 اهم (یعنی Rf=10) و زاویه وقوع خطای صفر درجه (یعنی Phi=0)، منحنی همگرایی به صورت شکل 2 بدست آمدهاست.
نتایج تخمین مکان خطا نیز در جدول 1 آورده شدهاست.
بر اساس این جدول مشخص است که مکان خطا با دقت بسیار بالا تخمین زده شده و خطای تخمین کمترین از 0.07 درصد بودهاست که بسیار ناچیز میباشد.
همچنین مشخص است که بهینهسازی در حدود تکرار 400 به همگرایی رسیده است.
شکل 2. منحنی همگرایی برای d=175، Rf=10 و Phi=0
جدول 1. نتایج تخمین مکان خطا برای d=175، Rf=10 و Phi=0
Calculated Actual Error
d 175.21 175 0.06925
t_del 2e-06 2e-06 0
R 0.030175 0.0275 9.728
L 0.0010029 0.0010028 0.01668
C 1.2994e-08 1.3e-08 -0.046476
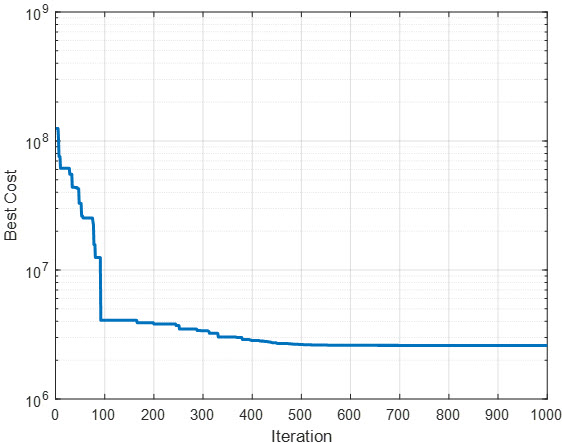
به عنوان مثال دیگر، برای وقوع خطا در 100 کیلومتری ترمینال S (یعنی L1=100)، مقاومت خطای 5 اهم (یعنی Rf=5) و زاویه وقوع خطای صفر درجه (یعنی Phi=0)، منحنی همگرایی به صورت شکل 3 بدست آمدهاست.
نتایج تخمین مکان خطا نیز در جدول 2 آورده شدهاست.
بر اساس این جدول نیز مشخص است که مکان خطا با دقت بسیار بالا تخمین زده شده و خطای تخمین کمترین از 0.05 درصد بودهاست که بسیار ناچیز میباشد.
شکل 3. منحنی همگرایی برای d=175، Rf=10 و Phi=0
جدول 2. نتایج تخمین مکان خطا برای d=100، Rf=5 و Phi=0
Calculated Actual Error
d 99.861 100 -0.046167
t_del 1.6822e-12 1.6822e-12 0
R 0.03094 0.0275 12.508
L 0.0010008 0.0010028 -0.19319
C 1.3021e-08 1.3e-08 0.16371
تعیین محل خطا در شبکه سه فاز با الگوریتم ACO
فایل سیمولینک
نوع خطا در بلوک Fault تعیین میشود.
در این بلوک، با تیک زدن گزینههای Phase A، Phase B ، Phase C و Ground، میتوان حالتهای مختلف خطا را ایجاد کرد.
به عنوان مثال برای خطای تک فاز به زمین (SLG) در فاز A، باید گزینههای A و G تیک زده شود.
برای خطای دو خط (2LF) مثلا برای خط B و C، باید گزینههای B و C را تیک زده و تیک سایر گزینهها برداشته شود.
کد ACO
در این کد تعداد متغیرهای بهینهسازی و حدود بالا و پایین متغیرها تغییر کرده است.
متغیرهای بهینهسازی شامل موارد زیر میباشد:
- فاصله خطا از ابتدای خط (d)
- تاخیر زمانی (t_del)
- مقاومت توالی صفر (r0) و توالی مثبت (r1) برای خط انتقال بر حسب اهم بر کیلومتر
- سلف توالی صفر (L0) و توالی مثبت (L1) برای خط انتقال بر حسب هانری بر کیلومتر
- خازن توالی صفر (C0) و توالی مثبت (C1) برای خط انتقال بر حسب فاراد بر کیلومتر
لازم به ذکر است که مقدار المانهای توالی منفی (r2, L2, C2) مطابق مقاله برابر مقادیر توالی مثبت در نظر گرفته شدهاست.
بنابراین بهینهسازی دارای 8 متغیر خواهد بود.
نسبت به کد قبلی، در کد ACO یک پارامتر جدید با نام Tend تعریف شدهاست که نشان دهندهی زمان پایان شبیهسازی سیمولینک است.
این پارامتر بر اساس زمان خطا تعریف شده و به گونهای تنظیم شده است که شبیهسازی سیمولینک نیم سیکل بعد از وقوع خطا تمام شود و تشخیص مکان خطا مانند مقاله با نیم سیکل انجام شود.
کد fitness
در این کد مانند قبل، ابتدا متغیرهای بهینهسازی بر اساس بردار ورودی x تعریف شده و پارامترهای دیگر نیز مطابق قبل محاسبه میشود. تا خط 27 کد مطابق قبل بوده و تغییر خاصی نداشتهاست.
در ادامه از رابطه زیر برای محاسبه مولفههای توالی صفر، توالی مثبت و توالی منفی جریان و ولتاژ اندازهگیریشده در دو طرف خط استفاده شدهاست.
به عنوان مثال موالفههای توالی ولتاژ صفر، مثبت و منفی ولتاژ Vs به صورت Vo12 نشان داده میشود.
در ادامه مقادیر ولتاژ در دو سمت خطا یعنی ولتاژهای Vfs و Vfr برای هر دو طرف خط و به صورت جداگانه برای هر یک از توالیهای صفر، مثبت و منفی محاسبه میشود.
به این منظور یک حلقه for برای k از 1 الی سه نوشته شدهاست که به ترتیب برای محاسبه مقادیر ولتاژ Vfs و Vfr برای توالی صفر، توالی مثبت و توالی منفی میباشد.
پس از محاسبه Vfs و Vfr برای هر توالی، اندازه ولتاژها در VFS و VFR ذخیره میشود.
در نهایت تابع هدف دقیقا مانند مقاله تعریف شدهاست.
نتایج شبیهسازی با متلب
مانند حالت قبل، قبل از شروع شبیهسازی فاصله خطا از ابتدای خط با پارامتر L قابل تنظیم میباشد.
نوع خطا نیز قبل از ران باید با تنظیم بلوک Fault در سیمولینک Sim_ThreePhase مشخص شود.
نتایج شبیهسازی برای دو حالت در زیر آورده شدهاست.
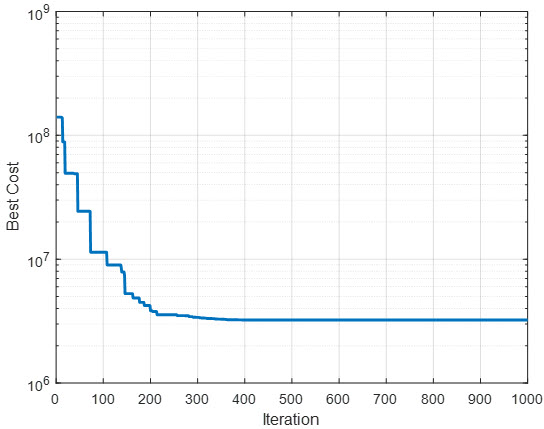
برای وقوع خطای تک فاز به زمین برای فاز A یعنی خطای AG در فاصله 100 کیلومتری از ابتدای خط با مقاومت خطای 10 اهم، منحنی همگرایی مطابق شکل (2) و نتایج بهینهسازی نیز مطابق جدول (1) بدست آمدهاست.
این شکل در اینجا نیامده است.
شکل (2). منحنی همگرایی برای وقوع خطای AG با مقاومت 10 اهم در فاصله 100 کیلومتری از ابتدای خط
جدول (1). نتایج بهینهسازی برای وقوع خطای AG در فاصله 100 کیلومتری از ابتدای خط با مقاومت 10 اهم
Calculated Actual Error
__________ __________ _________
d 99.928 100 -0.023863
t_del 6.4502e-07 6.45e-07 0
R0 0.28581 0.275 3.9309
R1 0.028639 0.0275 4.1421
L0 0.0035443 0.0034506 2.7152
L1 0.0010129 0.0010028 1.0055
C0 8.2746e-09 8.5e-09 -2.6517
C1 1.2875e-08 1.3e-08 -0.96058
مشخص است که مکان خطا با دقت بسیار بالا تشخیص داده شدهاست.
برای مثال دوم، خطا از نوع خطای دو خط (2LF) در نظر گرفته شدهاست.
فاصلهی خطا از ابتدای خط 150 کیلومتر و مقاومت خطا نیز 10 اهم در نظر گرفته شدهاست.
برای این حالت، منحنی همگرایی در شکل (3) و نتایج بهینهسازی در جدول (2) ارائه شده است.
بر اساس شکل (3) مشخص است که مقدار تابع هزینه در نهایت بسیار کوچک شده است که نشان دهندهی دقت بسیار بالا در تشخیص خطا میباشد.
مطابق جدول (2) نیز مشخص است که مکان خطا با دقت بسیار بالا تشخیص داده شدهاست.
این شکل در اینجا نیامده است.
شکل (3). منحنی همگرایی برای وقوع خطای BC با مقاومت 10 اهم در فاصله 150کیلومتری از ابتدای خط
جدول (2). نتایج بهینهسازی برای وقوع خطای BC با مقاومت 10 اهم در فاصله 150کیلومتری از ابتدای خط
Calculated Actual Error
__________ __________ ___________
d 150 150 -0.00032317
t_del 5.18e-08 5.18e-08 0
R0 0.29335 0.275 6.6718
R1 0.036441 0.0275 32.513
L0 0.0042925 0.0034506 24.399
L1 0.0010017 0.0010028 -0.10907
C0 6.4112e-09 8.5e-09 -24.575
C1 1.4013e-08 1.3e-08 7.7909
کلید واژه:
Ant colony optimization, fault-locating, Fault location for single-phase transmission line, Fault location for three-phase transmission line,
شبیه سازی مقاله
Accurate and comprehensive fault location algorithm for two-terminal transmission lines
با الگوریتم مورچگان, طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.