توضیحات
Learning intentional behavior in the K-model of the amygdala and entorhinal cortex with the cortico-hyppo campal formation
یادگیری رفتار تعمدی در مدل k ام بادامه در مغز و قشر مخ همراه با ساختار hyppocampal
چکیده:
کنش و رابطه مابین EC، بادامه در مغز و نیز انواع قشرها در مخ و مغز، با استفاده از تئوری مدل kام بررسی شده اند.
تاکیدات ویژه ای در مورد نقش EC در لحظات تصمیم گیری در اوقات حساسیت، تمایلات و هیجانات صورت گرفته است.
ما یک مدل KIV ساده شده را همراه با تقویت مثبت و منفی بررسی می کنیم.
مدل توسعه یافته شده در یک محیط 2 درجه آزادی محاسباتی اعمال شده برای یک حیوان با کنترل سنسور چند متغیره شبیه سازی شده است.
نتایج ما با اندازه گیری های ماکروسکوپیک تطابق یافته می شود.
مقدمه:
برا ساس مطالعات صورت گرفته در دهه های گذشته بر روی دینامیک جمعیت های عصبی، مدل های K ام توسعه یافته اند، که این مدل ها شامل KO,KI,KII و زیر مجموعه های KIII می شوند.
زیر مجموعه های KIII به طرز اعجاب آوری بوسیله قوانین فیزیکی-عصبی هدایت می شوند، و به عنوان معادلات دیفرانسیلی مرتبه دوم شناخته می شوند.
زیر مجموعه های K ویزگی های اصلی واحد های EEG و سیگنال های پالسی را دوباره تولید می کنند.
و به طرز موفقیت آمیزی برای طبقه بندی الگوها اسافاده می شوند.
مدل های K نسبت به باقی متدها بسیار بهتر می باشند، خصوصا در مواجهه با مسایل دشوار که همراه با محدودیت های غیر خطی و مثال های کاربردی کمی باشند.
مدل KIV سطح بالاترین مدل در زیر مجموعه های K می باشد.
KIV تابعی از انتخاب فعالیت را دارد که این مهم علاوه بر قابلیت های طبقه بندی و الگوسازی می باشد که در واحدهای KIII مشاهده می شود.
KIV از چندین اجزای بزرگ تشکیل می شود، که شامل COR، HF،MF، EC و نیز بادامه مغز می باشد.
همه این اجزا با حافظه ارتباط تنگاتنگ دارند.
مطالعات قبلی در مورد نقش اساس HF گیرامون مکان یابی بود.
مطالعات امروزه در مورد نقش EC و کنش آن با AMY و دیگر بخش های اساسی مدل KIV می باشد.
مطالعات پزشکی نشان می دهد که AMY، همراه با یک قشر و پوست مجاور، در لحظات تصمیم گیری و پروسه هیجان در رفتار ها تاثیر بسزایی دارند.
تصمیم گیری پس از انتشار سیگنال هیجان صورت می گیرد.
آزمایش های امروزه EEG نشان می دهد که ساختار مفید یک حالت متغیر، حالت اضطراری یک موج می باشد که تغییرات اساسی این موج در لایه های مختلف قشر و پوست پخش می شود.
ضرورت و ایجاب این اجزای مشترک باعث شناسایی جذب کننده های ماکروسکوپیک می شود.
یک مثال برای مشاهده این مهم در شکل (1) نشان داده شده است که فازهای متوالی متفاوت در مختصات های زمانی و فضایی 3 بعدی رسم شده اند.
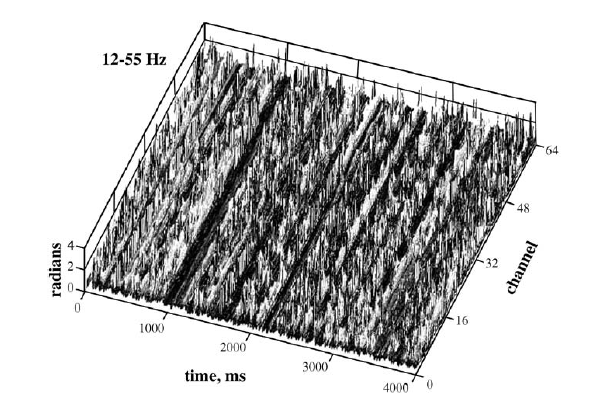
شکل (1)
مختصات فضایی با آرایه ای خطی از 64 تا الکترود EEG بر روی نیمکره توسعه یافته است.
پرش های زیاد در فازهای متوالی و متفاوت یه طور واضح در بخش های وسیعی از نیمکره در نرخ های آلفا مشاهده می شود.
هدف از این کار توسعه مدل KIV بر روی مغز بوده است، که می تواند برای مشاهدات EEG استفاده شود.
کار و پروژه کنونی با توضیح مدل KII و نیز EC و ارتباطات آنها با واحدهای غشایی KIII آغاز می شود.
یادگیری سیگنالهای مثبت و منفی در یک محیط 2 درجه آزادی بیان می شود.
نوسانات فضایی در مدل KIV برای انتقال حالت گذرای حالت ها که در اندازه گیری های EEG شناسایی می شوند استفاده شده است.
2- نقش غشا و بادامه مغز در تشکیل ساختار حالت KIV:
در این بخش، یک مدل ساده KIV را ارایه می دهیم.
ما غشاهای واحدهای HF و KIII را که تشکیل دهنده KIV می باشد را در نظر می گیریم.
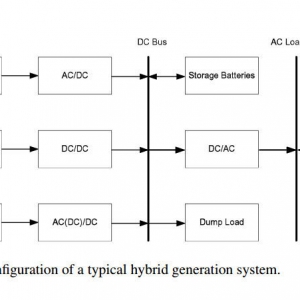
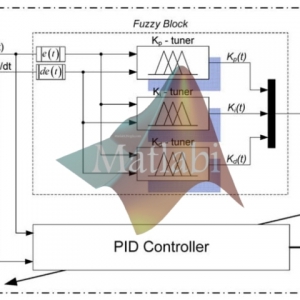
شکل (2) نحوه ارتباط و اتصال اجزای مدل KIV را نشان می دهد.
این ارتباطات به صورت کاملا دو طرفه نشان داده شده است:
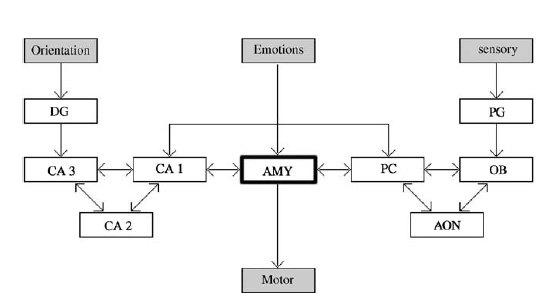
شکل (2)
خروجی یک گره در یک زیر مجموعه KII به طور مستقیم به گره ها در زیر مجموعه دیگر KII متصل می شود، اما از گره های مشابه دیگر خروجی نمی پذیرد.
علاوه بر این، این اتصالات پراکنده می باشند، به این معنی که یک گره در EC به مجموعه ای از گره ها در CA1 و PC متصل می باشد.
این پراکندگی می تواند به صورت درصدی از از هر گره بیان شود.
انجام پروژه با متلب با سایت متلبی
در مغز، این درصد بسیار ناچیز می باشد.
سطح عملکرد KIV با مبزان کنش آن با CA1,PC,EC و AMY که به عنوان زیر مجموعه های KII بیان میشوند سنجیده می شود.
AMY ورودی ها را از باقی زیر مجموعه های KII می گیرد و میزان چگالش ارتباط داخلی آن 100 درصد می باشد.
برای ارتباطات HFو PC به EC پارامتر پراکندگی 20 درصد می باشد.
ساحتار متغیرهای حالت KIV در هنگام پراکندگی موج ها ورودی از اجزای KII ضرورت پیدا می کند.
این موج مشترک از ورودی های عمومی به EC خواهند بود.
خروجی EC، به عنوان منبع کنترلی موتور سیستم شناخته می شود.
رفتار آشوبناک در زیر مجموعه های KIII در نتیجه نوسانات KIII می باشد.
در مغز های سالم، هیچ کدام از اجزای KII بر دیگر اجزا به طور دایم و پیوسته غلبه نمی کنند.
در KIV، در زمان های مشابه، اطالاعات برای ساخته شدن دینامیک های KIV به اشتراک گذاشته می شوند.
دینامیک های KIV، به حالت های ماکروسکوپیک دسترسی دارند.
در بخش بعدی، ضرورت و اهمیت نشان دادن حالت های عمومی دریافت کننده را در شبیه سازی های KIV می بینیم.
3- شبیه سازی کامپیوتر همراه با نتایج آزمایشی KIV
در شبیه سازی های کامپیوتری مدل KIV ما از یک محیط 2 درجه آزادی استفاده می کنیم.
در این محیط، ربات در طول یک شبکه حرکت می کند. در هر نقطه ای، حرکت بعدی ربات در چهار جهت انتخاب می شود .
ربات از دو سیستم سنسور استفاده می کند، که نشتنگر عمومی و سنسور مادون قرمز نام دارند.
نشانگر مسافت و جهت را تعیین می کند و مادون قرمز فاصله بین محل ربات با 8 جهت E,NE,N,NW,W,SW,Sو SE را مشخص می سازد.
عملکرد مدل KIV، از 3 مرحله مهم تشکیل یافته است:
یادگیری، کنترل و طبقه بندی. در مرحله یادگیری، ربات محیط را ارزیابی می کند.
در حضور سیگنالهای مثبت، یادگیری در غشای KIII رخ می دهد.
از طرف دیگر، یادگیری غشای KIII بر پایه سیگنالهای منفی استوار است.
در طول مرحله طبقه بندی هیچ گونه یادگیری اتفاق نمی افتد.
در عوض، ربات مقادیر تحریک شده را از AMY دریافت می کند.
چهار الگوی تحریک، حرکن به جلو، عقب، چرخش به راست و چپ می باشد.
این الگو برای تعیین مسیر استفاده می شوند.
در مدل KIV ما ضرایب بهره را بین EC,CA1, و PC در سطح 0.0001 ثابت نگه می داریم.
ضریب یادگیری در زیر مجموعه های KIII برابر با 0.85 می باشد.
ابعاد AMY نیز 80 گره می باشد.
ما چندین نتایج تجربی با زیر مجموعه های KIV گرفتیم.
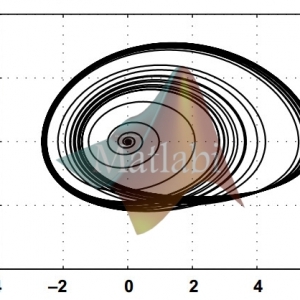
مثالی از منحنی پیموده شده توسط ربات در شبیه سازی شکل (3) نشان داده شده است.
این ربات 153 مرحله و قدم برای رسیدن از نقطه آغاز عمومی تا مدل KIV طی کرده است.
همانگونه که مشاهده می شود عملکرد سیستم بهینه می باشد.
با تنظیم نمودن بیشتر رفتار KIV، عملکرد به طور چشم گیری بهبود می یابد.
با این حال، این مهم تمرکز اصلی ما در این پروژه نمی باشد.
ما بیشتر بر روی دینامیک EC و ارتباطات وسیع آن با واحدهای KIII سر و کار داریم.
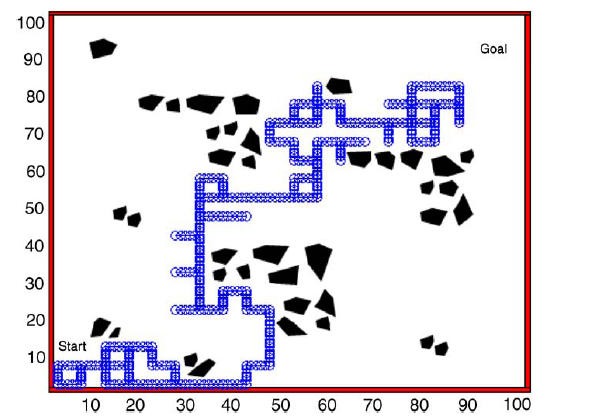
شکل (3)
4- دینامیک های 3 بعدی و موقت EC همراه با بادامه در مغز
ما سیگنالهای KIV را با استفاده از متدی که در مرجع (4) اشاره شده است ارزیابی می کنیم.
فازهای متوالی و متفاوت کانال های EC در مدل KIV در شکل (4) نشان داده شده اند.
در یک پریود زمانی 500 واحد زمانی با ثابت زمانی 1 میلی ثانیه .
تحریکیات هر کدام از کانالهای EC در بازه 15 تا 75 هرتز محدود شده اند.
ما در این شکل توالی پریود های زمانی مرتبط با فازهای متفاوت را که نتیجه حالت گذرا می باشد را مشاهده می کنیم.
نتیجه این عمل ایجاد حالت گذرای ماکروسکوپیک در اندازه گیری های EEG می باشد.
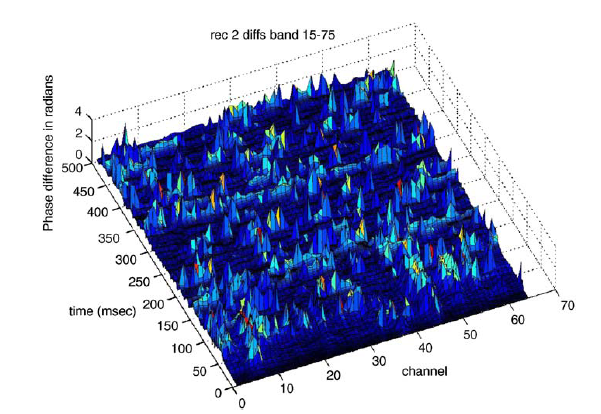
شکل (4)
جزئیات بیشتری از شبیه سازی KIV در شکل (5) نشان داده شده است، که فازهای متوالی را بر حسب تابعی از زمان نشان داده است.
همانطور که دیده می شود پریود های زیاد متناسب با فازهای به نسبت کم می باشد.
در نتایج آزمایشی EEG پریود زمانی 100 تا 150 میلی ثانیه در پرش ها مشاهده می شود.
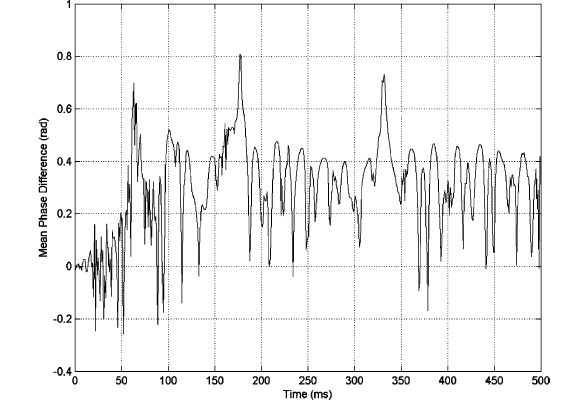
شکل (5)
5- نتیجه گیری:
هدف اصلی از این مطالعه نشان دادن نقش اساسی و مهم EC در دینامیک های ساده شده مدل KIV مغز می باشد.
مدل توسعه یافته KIV در یک محیط 2 درجه آزادی با استفاده از سنسورهای چندگانه تشخیص موقعیت، در کامپیوتر شبیه سازی شد.
مدل KIV فاز حالت گذرا را در EC در محیط شبیه سازی تحریک می کرد.
این نتایج برای نمایش اندازه گیری های حقیقی EEG استفاده می شود.
مطالعات آتی و در آینده برای مشخص کردن نقش مهم نغییرات پارامتریک، همانند مقادیر متغیر گین ها در اجزای KII و نیر انتخاب بهینه پارامترهای یادگیری در واحد های KIII اختصاص پیدا خواهد کرد.
یادگیری رفتار تعمدی در مدل k ام بادامه در مغز و قشر مخ همراه با ساختار hyppocampal
Amygdala, Entorhinal cortex, Spatial EEG, Phase transition, KIV model
شبیه سازی
Learning intentional behavior in the K-model of the amygdala and entorhinal cortex with the cortico-hyppo campal formation
پیاده سازی روئیت گر حالت , به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.