توضیحات
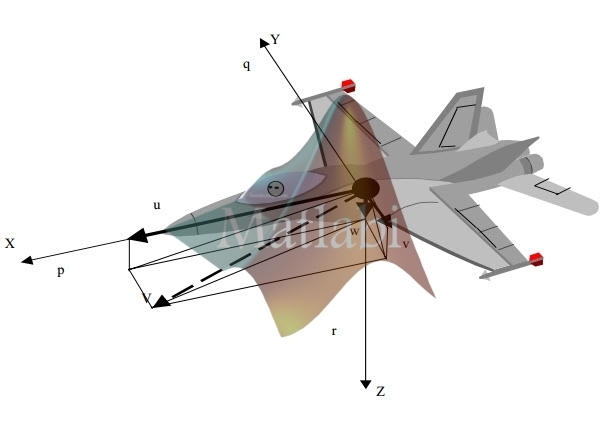
LQG LTR CONTROLLER DESIGN FOR AN AIRCRAFT MODEL
بررسی روش هایی برای کنترل زاویه اوج هواپیما
در این مقاله روش هایی برای کنترل زاویه اوج هواپیما مورد بررسی قرار گرفته است.
امروزه طراحان سیستم های Autopilot تکیه زیادی روی Monitoring و کنترل زیر سیستمها دارند.
برای طراحی یک سیستم Autopilot به تئوری کنترلی مناسب و اطلاعات پایداری سیستم در دامنه های مختلف نیاز است.
کنترل زاویه اوج هواپیما با تغییر زاویه دم متعادل کننده آن توسط انحراف بالابر صورت می پذیرد.
پروژه درس کنترل دیجیتال
گزارش با فهرست زیر به همراه شبیه سازی با متلب وجود دارد:
فهرست
مقدمه…………………………………………………………………………………………………………………………3
مراحل طراحی اوتوپایلوت…………………………………………………………………………………………………..3
مدل سازی سیستم و استخراج معادلات…………………………………………………………………………………4
معادلات غیر خطی سیستم………………………………………………………………………………………………..7
خطی سازی معادلات غیر خطی سیستم حول نقطه کار مورد نظر…………………………………………………..11
فضای حالت سیستم در حوزه پیوسته……………………………………………………………………………………12
قیود حاکم بر طراحی………………………………………………………………………………………………………..13
بررسی پاسخ زمانی………………………………………………………………………………………………………..13
تعیین معادلات حالت در حوزه گسسته……………………………………………………………………………………14
تابع تبدیل سیستم در حوزه گسسته……………………………………………………………………………………..14
طراحی به روش مکان ریشه………………………………………………………………………………………………..14
کنترل بهینه خطی در حوزه گسسته………………………………………………………………………………………16
طراحی رویتگر حداقل مرتبه…………………………………………………………………………………………………21
طراحی کنترل کننده تطبیقی……………………………………………………………………………………………….26
سیستم های تطبیقی مرجع……………………………………………………………………………………………….27
دارای گزارش 33صفحه ای در قالب ورد است.
کلید واژه : کنترل غیرخطی، کنترل دیجیتال, پروژه متلب, پروژه matlab , شبیه سازی با متلب
LQG/LTR controller, aircaft
شبیه سازی
LQG LTR CONTROLLER DESIGN FOR AN AIRCRAFT MODEL
طبق توضیحات فوق تهیه و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.