توضیحات
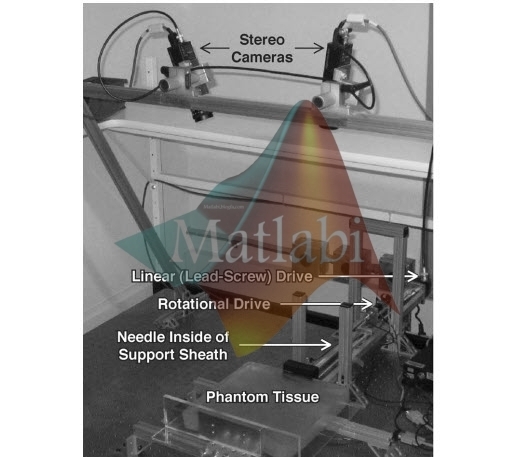
Image Guidance of Flexible Tip-Steerable Needles
این پروژه دارای گزارش کار 12 صفحه ای در قالب ورد است.
مقدمه
تزریق سوزن[1] یکی از تکنیکهای رایج جراحی است.
کاربردهای این روش در بسیاری از اعمال زیر پوستی است که نیازمند رساندن درمان به یا برداشتن نمونه از یک محل خاص است.
نکته قابل توجه در این روش آن است که خطا در رسیدن سوزن به هدف باعث کاهش تأثیر درمان میشود.
به طوری که در برخی موارد از قبیل نمونه برداری[2]، براکی تراپی[3] و بیهوشی موضعی[4] به دقت میلیمتری و در مسائلی از قبیل جراحی مغز، چشم و گوش جهت درمان موثر به دقت میکرومتری نیازمندیم.
مسائل متنوعی باعث خطای هدف میشود که از مهمترین آنها میتوان تغییر موقعیت هدف به علت تغییر شکل بافت هنگام حرکت سوزن، خم شدن ناخواسته سوزن حین حرکت، عدم قطعیت در هدف به علت نادقیق بودن تصاویر و … اشاره نمود.
علاوه بر آن در بسیاری موارد هدف فاصله بسیار کمی با ارگانهای مجاور دارد که مراقبت شدیدی را جهت جلوگیری از هر گونه آسیب و یا انتشار بیماری که منجر به وخامت حال بیمار میگردد، نیازمند میباشد.
برای نیل به اهداف فوق بایستی از تکنیکهایی موسوم به هدایت سوزن[5] استفاده شود.
هدف از این تحقیق هدایت یک سوزن با سر نامتقارن اریب جهت رسیدن به هدف و اجتناب از موانع است.
برعکس سوزنهای با سر متقارن که در آنها هر گونه خم شدن سوزن نامطلوب است، در سوزنهای با سر نامتقارن میتوان از انحنای سوزن جهت کنترل و مهار کردن آن حین حرکت استفاده نمود.
این کار با چرخاندن سوزن حول محور خود (رول) امکانپذیر است.
بررسی اجمالی کارهای قبلی
با خرید این محصول این بخش از گزارش قابل رویت خواهد بود.
بررسی کلی مدل هدایت سوزن
با خرید این محصول این بخش از گزارش قابل رویت خواهد بود.
محدودیتهای غیرهولونومیکی و ورودیهای کنترلی
با خرید این محصول این بخش از گزارش قابل رویت خواهد بود.
مدل سیستم
با خرید این محصول این بخش از گزارش قابل رویت خواهد بود.
طراحی کنترل کننده برای سیستم
با خرید این محصول این بخش از گزارش قابل رویت خواهد بود.
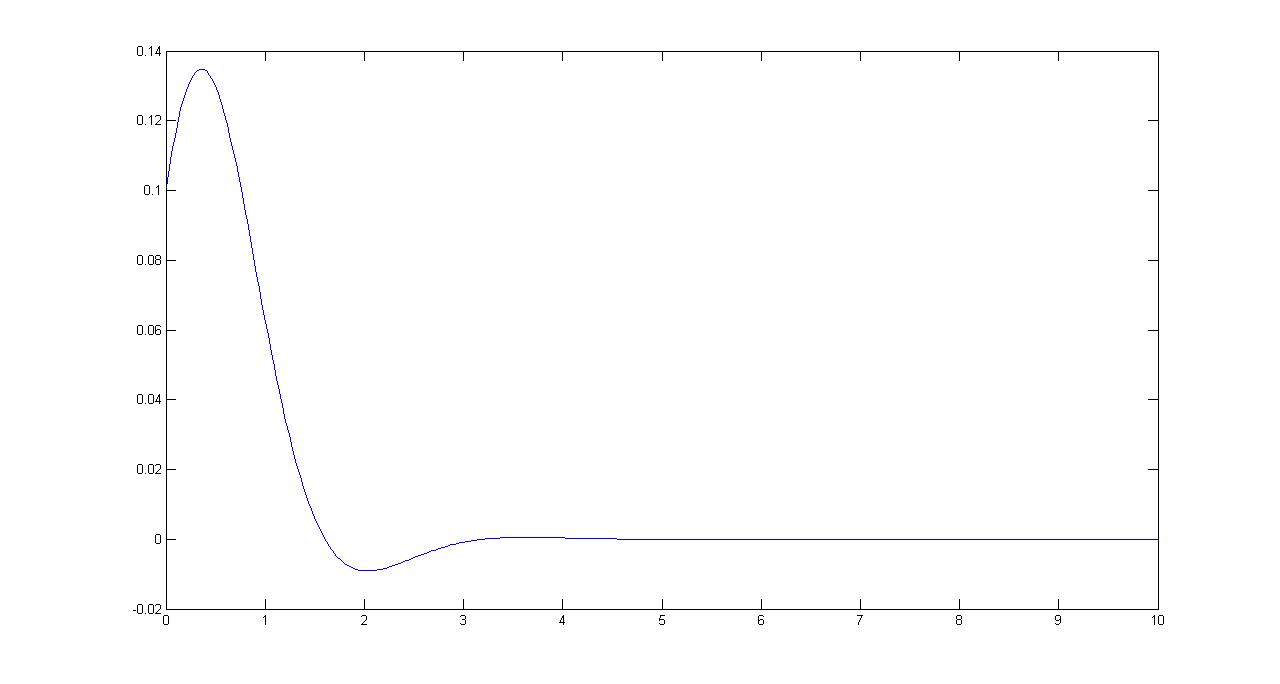
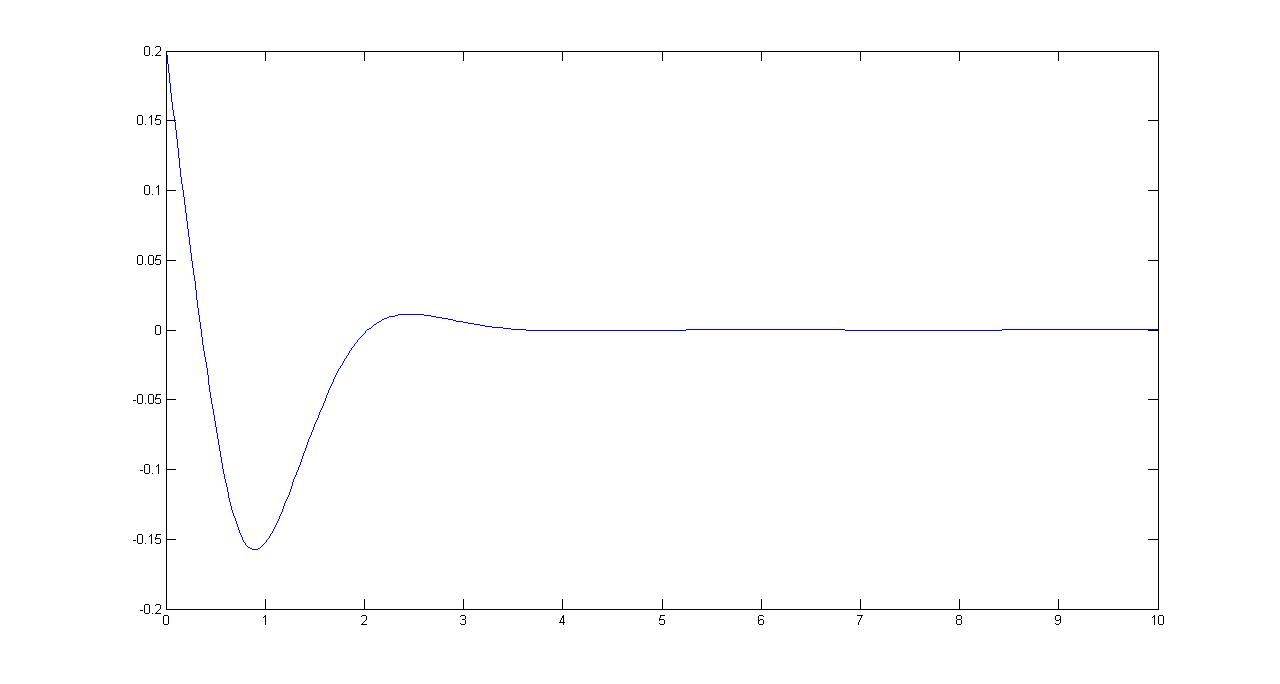
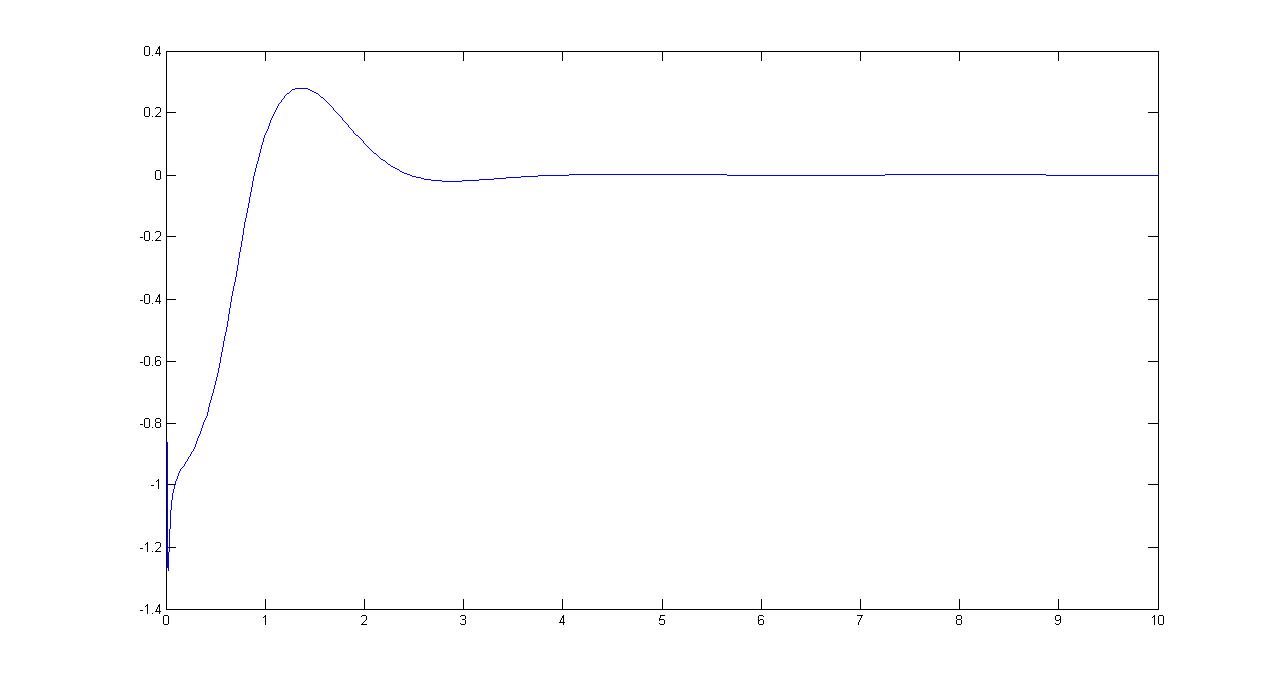
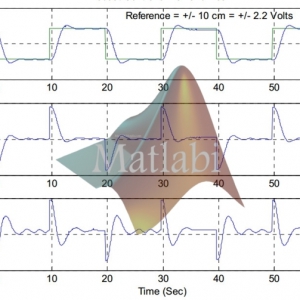
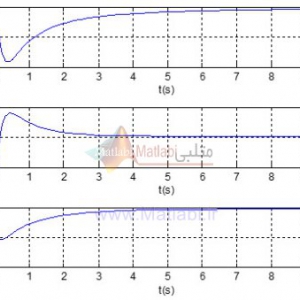
نتایج شبیه سازی با متلب
در ادامه نتایج شبیه سازی را ملاحظه میکنید.
 |
الف- نمودار حالت اول |
 |
ب- نمودار حالت دوم |
 |
ج- نمودار حالت سوم |
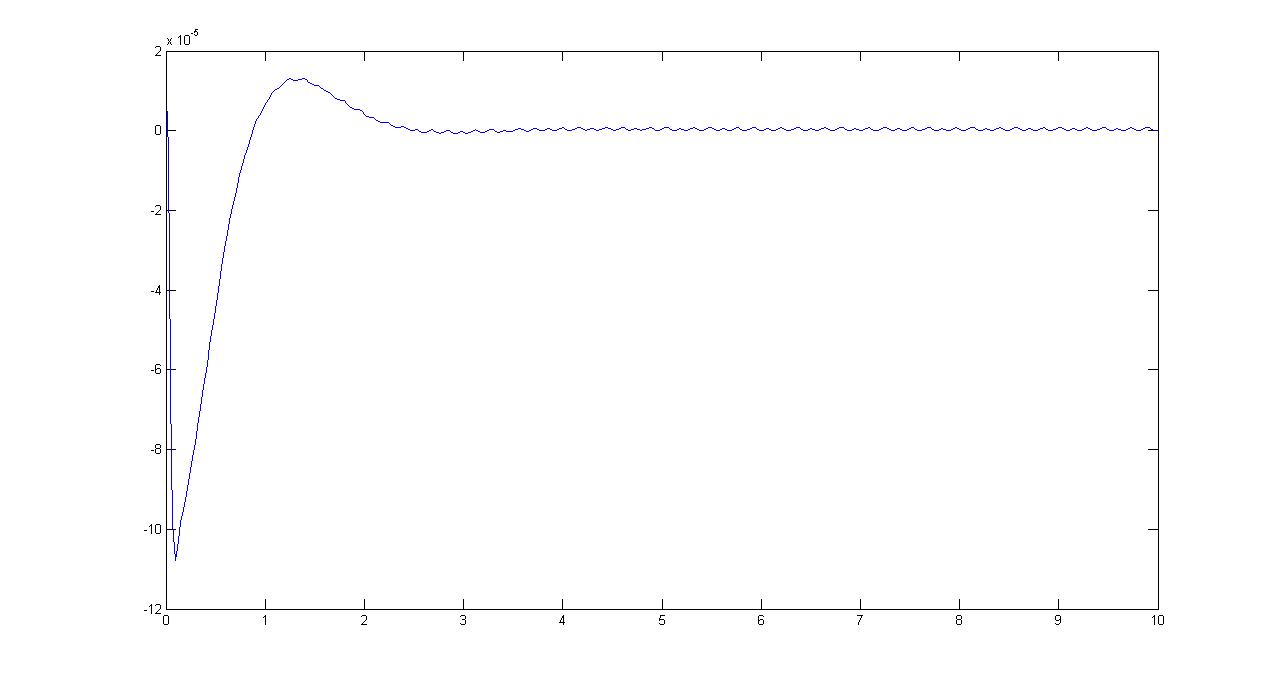 |
د- خطای رویتگر حالت اول |
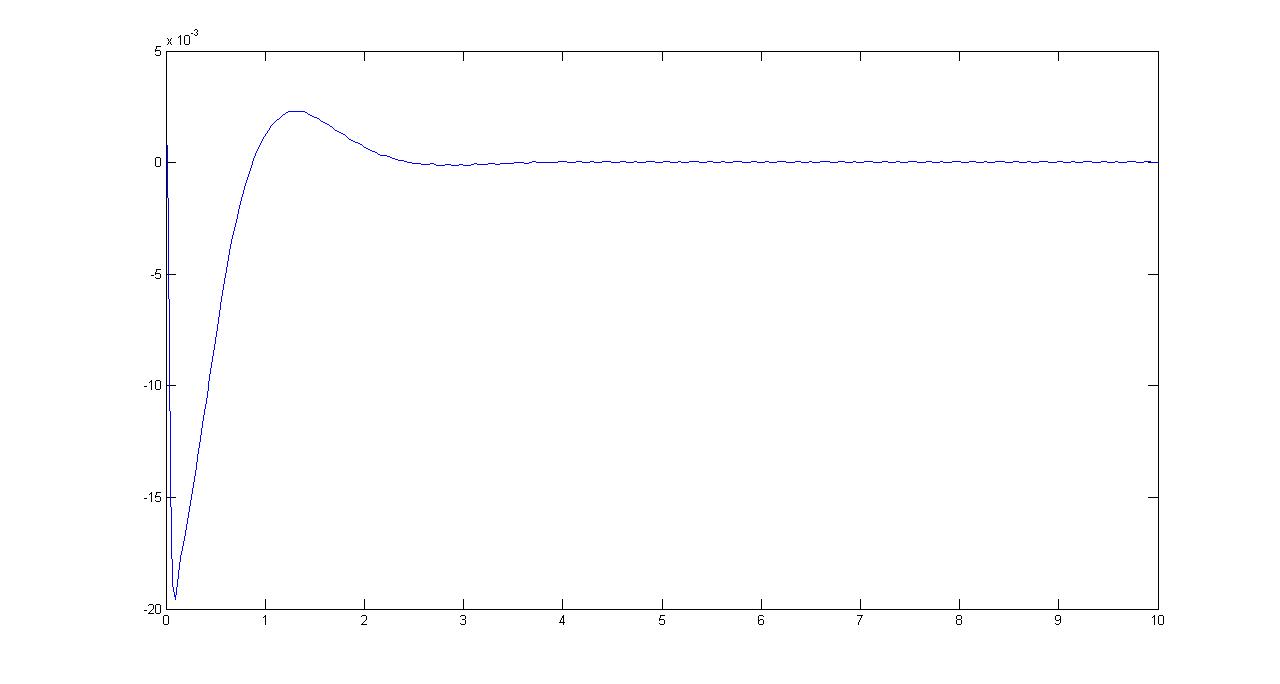 |
ه- خطای رویتگر حالت دوم |
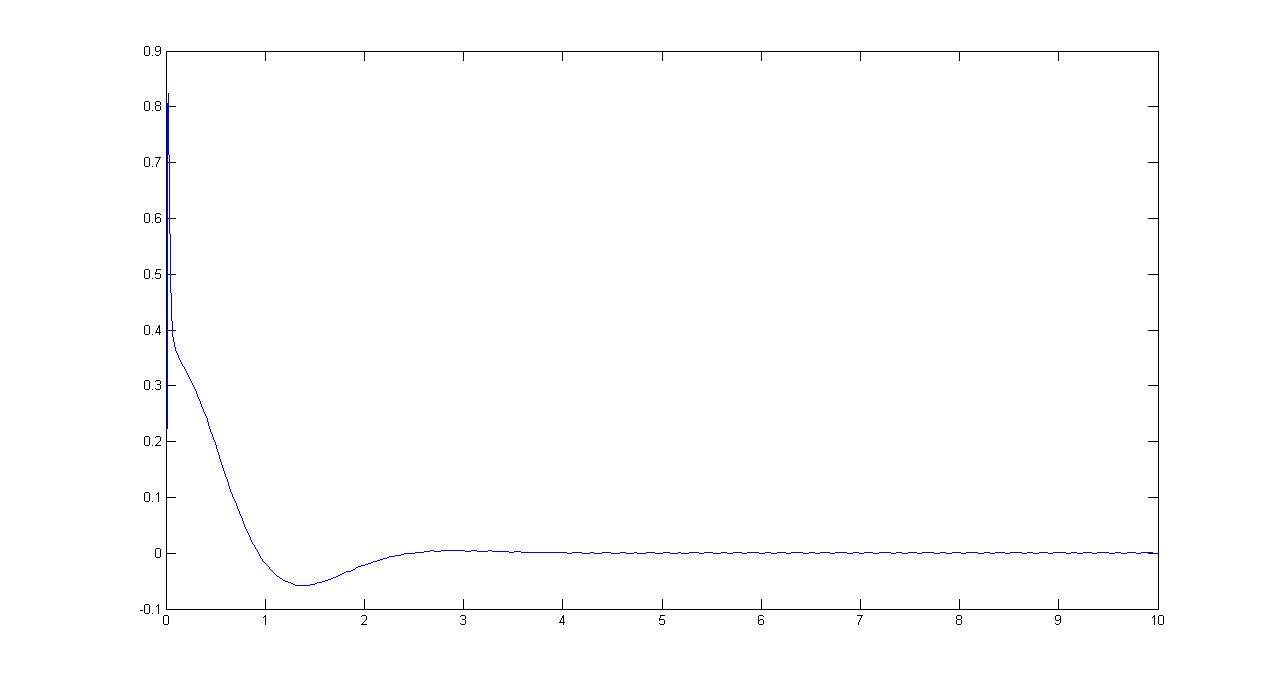 |
و- خطای رویتگر حالت سوم |
کلید واژه : کنترل غیرخطی, خطی سازی فیدبک , رباتیک, پروژه متلب, پروژه matlab , شبیه سازی با متلب
Feedback control, needle steering, nonholonomic system, robotic
شبیه سازی
Image Guidance of Flexible Tip-Steerable Needles
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.