توضیحات
PID vs LQ Control Techniques Applied to an Indoor Micro Quadrotor
روش کلاسیک PID و روش جدید LQ
چکیده :
توسعه ربات های پرنده ، همواره یکی از رویاهای شیرین انسان بوده است .
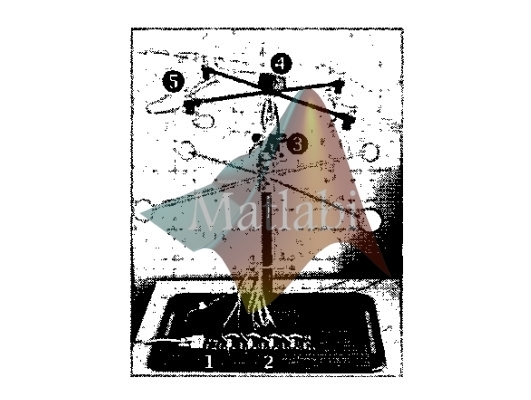
سیستم VTOL یک کلاس مفید از این ربات ها را به نمایش می گذارد . در این مقاله ما نتایج کنترلی را بر روی یک روبات که Quadrotor نامیده می شود ، پیاده سازی کرده ایم .
روش های کنترلی ارائه شده عبارتند از روش کلاسیک PID و روش جدید LQ که این روش بر روی مدل دقیقتر پیاده شده اند .
شبیه سازی در کنار نتایج آزمایش ها ارائه شده اند و در نهایت ما نتایج را بر روی هلیکوپتر در حال پرواز تست کرده ایم .
این توسعه کنترلی بخشی از پروژه OS4 است که ما در آزمایشگاه روی این پروژه کار می کنیم .
مقدمه :
مهمترین کارها در سال های اخیر پیشرفت در زمینه های افزایش توان و پردازش دیتا می باشد که با استفاده از UAVها این امر تحقق پیدا کرده است .
در این راستا می توان به تولید میکرو IMU ها که ترکیبی از MEMS ها می باشند اشاره کرد .
آخرین تکنولوژی توانی برابر 180W/kg تولید می کند که این توان برای ربات های هوایی بسیار مفید می باشد .
این تکنولوژی در اصل برای کاربردهای دستی توسعه پیدا کرد اما پس از مدتی در اختیار کارهای هوایی از قبیل ربات های پروازی قرار گرفت .
ضمنا این کاهش هزینه ها و حجم از طرف دیگر دشواری های کنترلی را به دنبال دارد .
بنابراین کوچک سازی ، استفاده از تکنولوژی MEMS را می طلبد که هنوز از تکنولوژی سنسورهای قراردادی به خاطر اثر نویز موثرتر نیست .
استفاده از IMU یعنی بازده کمتر پردازش دیتا و این نیز به نوبه خود یکی از محدودیت ها می باشد .
مدل سازی سیستم :
در فرآیند های کنترلی اولین گام ، داشتن یک مدل دقیق از سیستم می باشد .
خصوصا برای سیستم های پروازی که از پیچیدگی بیشتری برخوردارند .
حرکت شناسی
با توجه به این که سیستم در فضای سه بعدی قرار دارد می توان نوشت :

که در آن منظور از c و s به ترتیب کسینوس و سینوس است .
سرعت در هر جهت با دیفرانسیل گیری از معادلات بالا بدست می آید .
بنابراین مربع سرعت در هر نقطه به صورت
![]()
انرژی
با توجه به رابطه 2 داریم
![]()
همچنین
![]()
معادلات حرکت
با استفاده از معادلات حرکتی لاگرانژ داریم
![]()
بنابراین ا استفاده از معادلات فوق ، معادلات سیستم به صورت زیر می باشند
…
و با در نظر گرفتن ورودی های سیستم و نویز معادلات سیستم به صورت زیر می باشند
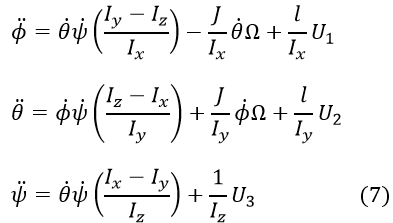
در کل برای شبیه سازی نتایج از معادلات فوق استفاده می کنیم .
با توجه به معادلات فوق مشاهده می کنیم که سیستم غیرخطی است و لذا باید حول یک نقطه مشخص خطی سازی شود .
اما در مقاله برای داشتن نتایج دقیق تر ، همان سیستم غیر خطی شبیه سازی شده است .
در این مقاله متاسفانه پارامترهای دستگاه که برای شبیه سازی استفاده شده اند ، ذکر نشده اند و به همین دلیل ممکن است نمودار های ما اندکی متفاوت باشند.
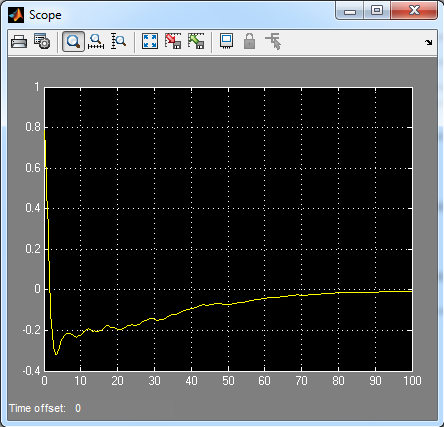
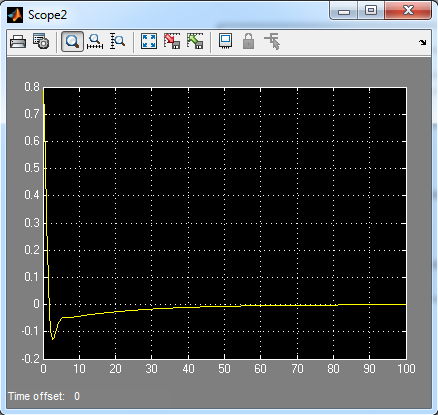
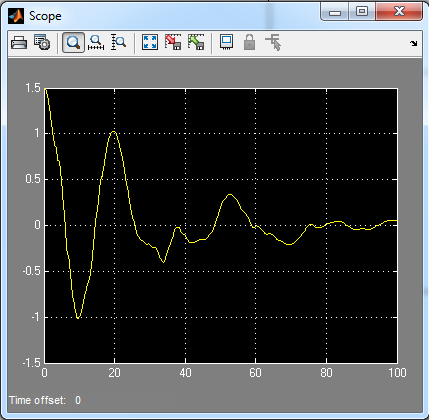
نتابج با استفاده از کنترل کننده PID به صورت زیر است :
زاویه ![]() :
:
زاویه ![]() :
:
زاویه ![]() :
:
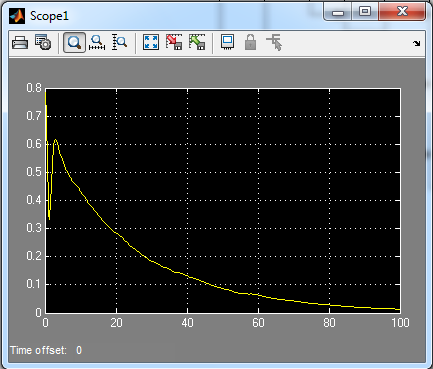
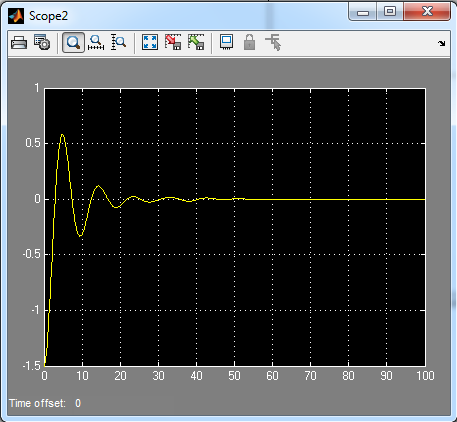
و به همین ترتیب نتایج برای کنترل کننده LQR به صورت زیر می باشند :
زاویه ![]() :
:
زاویه ![]() :
:
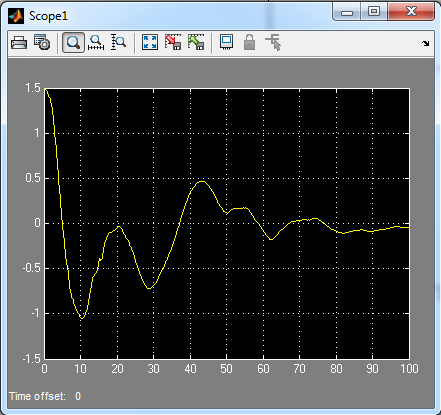
زاویه ![]() :
:
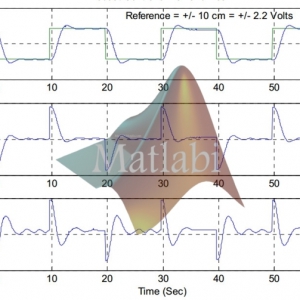
تحلیل نتایج شبیه سازی
در شکل های فوق هر سه متغییر حالت شبیه سازی شده اند ، در حالت اول با استفاده از کنترل کننده PID ، سیستم کنترل شده و در حالت دوم متغیر ها با استفاده از کنترل کننده LQ ، شبیه سازی شده اند .
مشاهده می شود که کنترل کننده LQ بسیار بهتر از کنترل کننده کلاسیک PID عمل می کند .
توجه داریم که در شبیه سازی های فوق نویز گوسی با واریانس 0.1 به منظور نزدیک بودن شبیه سازی ها به نتایج عملی به سیستم اعمال شده است .
کلید واژه : کنترلر PID
flying robot, pid, micro
شبیه سازی
PID vs LQ Control Techniques Applied to an Indoor Micro Quadrotor
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.