توضیحات
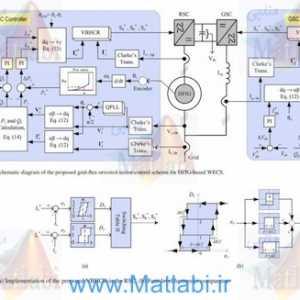
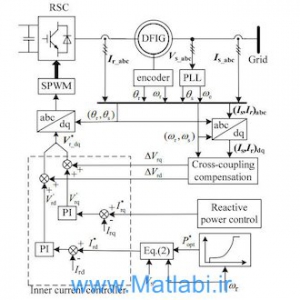
Two fuzzy-based direct power control strategies for doubly-fed induction generators in wind energy conversion systems
تئوری کنترل فازی عصبی:
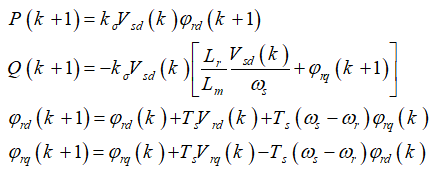
مطابق تئوری ارائه شده در مقاله پایه, مقدار توان پیش بینی شده به صورت زیر است
 (1)
(1)
روش کنترل مستقیم توان فازی نیز بدین صورت است.
 (2)
(2)
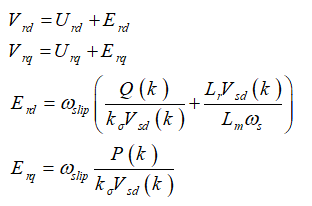
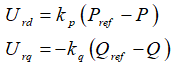
در این روابط ترم های ![]() و
و ![]() در حالت کنترل تناسبی به صورت
در حالت کنترل تناسبی به صورت
 (3)
(3)
و در کنترل توان مستقیم فازی, خروجی سیستم فازی هستند. در ادامه می خواهیم بخشهای ![]() و
و ![]() را توسط یک سیستم فازی عصبی و به نحوی تعیین کنیم که خطای ردیابی توان های فعال و غیرفعال مرجع به سمت صفر میل پیدا کند. برای این منظور فرض کنید سیستم فازی عصبی دارای دو ورودی به صورت
را توسط یک سیستم فازی عصبی و به نحوی تعیین کنیم که خطای ردیابی توان های فعال و غیرفعال مرجع به سمت صفر میل پیدا کند. برای این منظور فرض کنید سیستم فازی عصبی دارای دو ورودی به صورت
 (4)
(4)
باشد. همچنین فرض کنید برای هر کدام از این دو ورودی به تعداد n تابع عضویت در نظر بگیریم. خروجی این توابع عضویت را به صورت زیر نامگذاری می کنیم
 (5)
(5)
در ادامه نوع استنتاج را به صورت ضربی(product inference) انتخاب می کنیم. در این صورت با تعریف متغیرهای
 (6)
(6)
خروجی شبکه فازی – عصبی به صورت رابطه 7 قابل بیان خواهد بود.
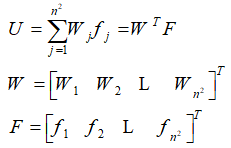 (7)
(7)
در ادامه قانون به روز رسانی وزن های شبکه عصبی فازی را به نحوی تعیین می کنیم که تابع هزینه
![]() (8)
(8)
برای توان فعال و تابع هزینه
![]() (9)
(9)
برای توان غیرفعال کمینه گردد.
برای کمینه سازی خطای ردیابی توان فعال فرض کنید سیگنال کنترل ![]() را به صورت
را به صورت
![]() (10)
(10)
انتخاب کنیم. در این صورت مقدار توان لحظه بعد برابر است با
![]() (11)
(11)
همچنین مقدار گرادیان تابع هزینه 8 نسبت به وزن های شبکه برابر است با
![]() (12)
(12)
بنابراین با به کارگیری قاعده حرکت خلاف گرادیان می توان وزن های شبکه فازی عصبی مربوط به کنترل توان اکتیو را به صورت رابطه 13 به روز رسانی کرد.
![]() (13)
(13)
در این رابطه ![]() نرخ یادگیری شبکه فازی عصبی است.
نرخ یادگیری شبکه فازی عصبی است.
برای کمینه سازی خطای ردیابی توان راکتیو فرض کنید سیگنال کنترل ![]() را به صورت
را به صورت
![]() (14)
(14)
انتخاب کنیم. در این صورت مقدار توان لحظه بعد برابر است با
(15) 
همچنین مقدار گرادیان تابع هزینه 9 نسبت به وزن های شبکه برابر است با
![]() (15)
(15)
بنابراین با به کارگیری قاعده حرکت خلاف گرادیان می توان وزن های شبکه فازی عصبی مربوط به کنترل توان اکتیو را به صورت رابطه 16 به روز رسانی کرد.
![]() (16)
(16)
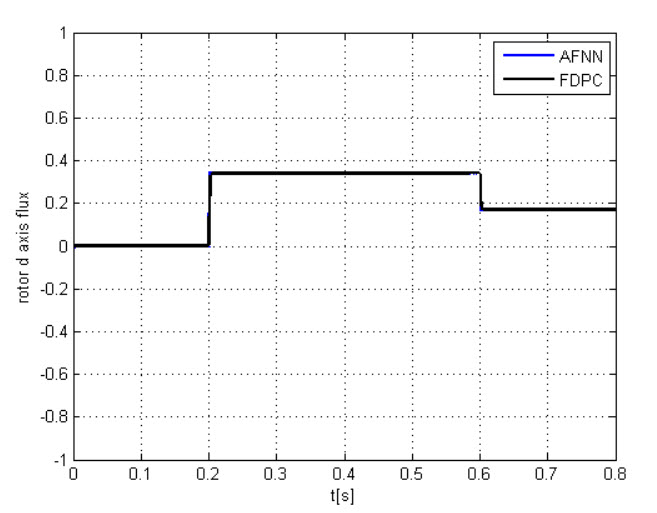
در شبیه سازی انجام شده توابع عضویت برای هر ورودی را برابر 7 عدد و با شکل همان توابع عضویت مقاله در نظر گرفته ایم.
برنامه متلب تهیه شده از قرار زیر است:
- فایل سیمولینک mdl که روش مقاله را جهت کنترل مستقیم توان پیاده سازی می کند.
- فایل سیمولینک mdl که روش مقاله را جهت کنترل مستقیم توان به روش فازی عصبی پیاده سازی می کند.
- فایل m که مدل سیستم مقاله را پیاده سازی می کند.
- فایل m که بخشی از سیگنال کنترل روش مقاله را تولید می کند.
- فایل m که روش کنترل فازی عصبی را برای توان اکتیو پیاده سازی می کند.
- فایل m که روش کنترل فازی عصبی را برای توان راکتیو پیاده سازی می کند.
- فایل های با پسوند .fis که حاوی ساختار سیستم های فازی روش مقاله هستند.
- انجام پروژه شبکه عصبی با متلبی
کلید واژه:
(Direct power control) DPC , (Fuzzy logic controller) FLC , (Doubly fed induction generator) DFIG
شبیه سازی کنترل توان اکتیو و راکتیو نیروگاه بادی متصل به ژنراتور DFIG به روش فازی عصبی
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.