توضیحات
Simulink Model of a Full State Observer for a DC Motor Position, Speed, and Current
پروژه کنترل مدرن
خطوط اول تا سوم به ترتیب مربوط به پاک کردن صفحه ی اصلی متلب (command window)، پاک کردن داده ها (workspace) و در نهایت بستن تمامی نمودار هایی که قبل از این پروژه اجرا شده اند.
در قسمت Data داده های مساله وارد شده اند. و در قسمت بعد state space matrix ماتریس های فضای حالت طبق تعریف در مقاله کدنویسی شده اند.
همانطور که از این ماتریس ها نیز مشخص است سیستم ما تک ورودی تک خروجی است.
در قسمت بعدی با استفاده از دستور ss فضای حالت سیستم در متلب ایجاد شده و سپس توسط دستور … ضرایب چندجمله ای های تابع تبدیل ایجاد شده سپس در نهایت با دستور … تابع تبدیل این سیستم تشکیل میشود.
در مرحله ی بعد دیاگرام بود و نایکوییست ایجاد میگردند. که به ترتیب در زیر امده اند.

شکل1- نمودار مکان هندسی تابع تبدیل موتور DC
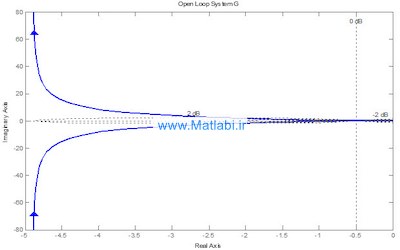
شکل2- دیاگرام نایکوییست تابع تبدیل موتور DC
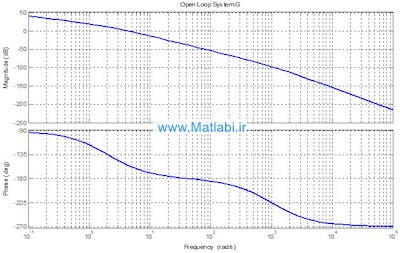
شکل3- دیاگرام بود تابع تبدیل موتور DC
در قسمت بعد مقادیر ویژه و بردارهای ویژه محاسبه شده اند و در صورت پایدار بودن سیستم یعنی منفی بودن قسمت حقیقی مقادیر ویژه پاسخ پله سیستم رسم میشود که در این مقاله این سیستم پایدار نیست.
در مرحله ی بعد با توجه به روابط موجود در مقاله ماتریس های رویت پذیری و کنترل پذیری محاسبه شده و کنترل پذیر و رویت پذیر بودن سیستم بررسی میگردد.
در مرحله ی بعد بهره ی فیدبک حالت برای دو دسته قطب مختلف محاسبه شده و در سیستم زیر استفاده میگردد.
این شکل در اینجا نیامده است.
که به ازای شرایط اولیه ی x0=[10 15 15] نتایج به صورت زیر است. همانطور که مشاهده میشود حالت ها به سمت صفر میروند.
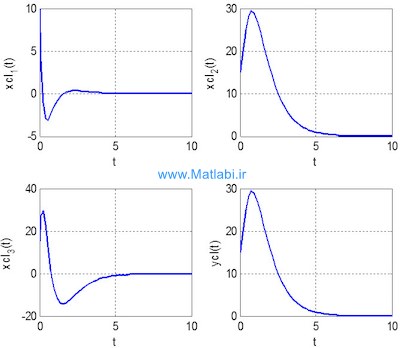
شکل4- حالت ها و خروجی سیستم حلقه بسته با فیدبک حالت
در قسمت بعدی گین رویتگر حالت بدست می اید و با توجه به بلوک دیاگرام موجود در مقاله این سیستم در محیط سیمولینک به صورت زیر شبیه سازی میشود.
این شکل در اینجا نیامده است.
با کلیک بر روی هر کدام از بلوک های motor state_space model و observer state space model به ترتیب نمودار های بلوکی زیر نشان داده میشوند.
این شکل در اینجا نیامده است.
نتایج شبیه سازی این قسمت برای شرایط اولیه ی x=[0 0 0] و xhat=[0 0 0] بدست امده است.:
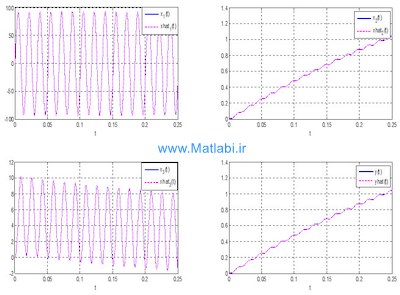
شکل5- تخمین حالت های سیستم با استفاده از رویتگر حالت
کلید واژه : Circuit Model, State Space, DC Motors, Armature, Rotor, Luenberger Sate Observer, Simulink
شبیه سازی
Simulink Model of a Full State Observer for a DC Motor Position, Speed, and Current
به عنوان پروژه کنترل مدرن و مطابق توضیحات فوق تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.