
توضیحات
Control of DFIG based Wind Generation to Improve Inter-Area Oscillation Damping
بررسی دینامیکی و کنترل Doubly fed induction generator به منظور بهبود نوسانهای موجود در یک شبکه قدرت.
پروژه کنترل مدرن
مواردی که به آن پرداخته شده است:
1-مدل سیستم وبدست آوردن معادلات فضای حالت وتابع تبدیل سیستم
2-بحث در مورد پایداری سیستم و بدست آوردن قطبها و رسم مکان هندسی ریشه ها و رسم نمودار بود و نایکوییست و مسیر حرکت قطبها
3-اگر سیستم پایدار بود پاسخ پله در آن راببینیم
4-چک کردن کنترل پذیری ورویت پذیری اگرمقاله نداشت باید خودمان طراحی کنیم
5-طراحی فیدبک حالت وطراحی رویتگر حالت وانتخاب قطبها برای فیدبک حالت نزدیک محور و دورتر از آن
6-انتخاب قطبها برای رویتگر حالت و نزدیک محور قطبه ودورتر از آن وشبیه سازی و ارایه نتایج
شبیه سازی در محیط متلب انجام شده است.
در یک گزارش 2 صفحه ای برنامه متلب تشریح شده است.
گزارش شبیه سازی با متلب
از خط 5 تا 48 تمامی داده های مقاله وارد شده اند.
فقط در مورد خطوط 9 و 10 باید عرض کنم که مقادیر Ns و Nr در مقاله مشخص نشده بودند برای همین از بیرون به عنوان ورودی وارد میشوند.
به این صورت که بعد از اجرای برنامه در صفحه ی اصلی متلب (command window) از شما میخواهد که مقادیر این دو را وارد کنید.
از خطوط 55 تا 62 ماتریس های c و D را خودمان انتخاب میکنیم.
ماتریس C به گونه ای انتخاب شده است که خروجی های ما همان حالت های سیستم باشند.
در خط 64 مقادیر و بردارهای ویژه محاسبه شده اند و در خطوط 66 و 67 نمایش داده میشوند.
در خط 70 معادلات حالت سیستم با استفاده از دستور .. در محیط متلب ایجاد میگردند.
از خطوط 73 تا 88 به ترتیب برای نسبت هر خروجی به هر ورودی یک تابع تبدیل تعریف و دیاگرام بود و نایکوییست و مکان هندسی انها رسم میگردند.
خطوط 101 تا 113 بررسی میکنند که اگر مقادیر ویژه ی ماتریس A همگی سمت چپ محور jw باشد نشون میده سیستم پایدار است و پاسخ پله را برای تمام توابع تبدیل رسم میکند. و اگر پایدار نباشد نشان میدهد ناپایدار است.
از خط 116 تا 121ماتریس های کنترل پذیری و رویت پذیری محاسبه و نمایش داده میشوند.
و از خطوط 123 تا 137 کنترل پذیری و رویت پذیری سیستم بررسی میگردد.
و در نهایت برای حالت های دور و نزدیک فیدبک بهینه و برای مقادیر دور رویت گر حالت بدست می ایند و نتایج شبیه سازی در سیمولینک مشاهده میشود.
دیاگرام بلوکی رویتگر و کنترلگر حالت به صورت زیر است.
…
در اینجا از ورودی های ثابت برای ورودی سیستم استفاده شده است.
در قسمت run simulation این مدار اجرا میگردد و حالت های سیستم نشان داده میشوند.
قسمت سبز رنگ که در آخر آمده است محاسبه ی فیدبک و رویتگر حالت برای تک تک توابع تبدیل است ولی چون در این حالت سیستم کنترل پذیر و رویت ناپذیر است نمیتوان سیستم را به سمت قطب های مطلوب برد.
این قسمت فقط جهت اشنایی شما نوشته شده است ولی به دلایل ذکر شده غیر فعال گردیده است.
نتایج شبیه سازی با متلب
این نمودارها شامل دیاگرام بود، دیاگرام نایکوییست و مکان هندسی مربوط به توابع تبدیل حاصل از نسبت تک تک خروجی ها به تک تک ورودی هاست. به این صورت که مربوط به نسبت خروجی دوم به ورودی اول است و مابقی نیز به همین ترتیب.
در زیر نمودارهای مربوط به هرکدام از توابع تبدیل آورده شده اند.
در اینجا فقط یک نمونه از تصویر خروجی را قرار داده ایم.
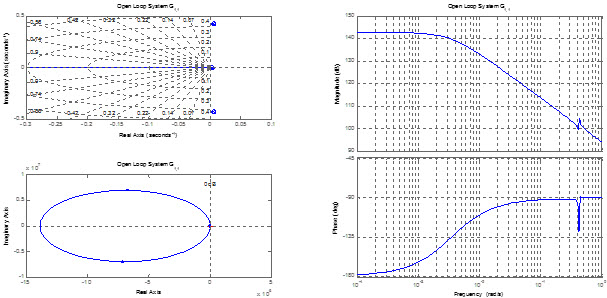
شکل1- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی اول به ورودی اول
شکل2- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی اول به ورودی دوم
شکل3- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی اول به ورودی سوم
شکل4- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی اول به ورودی چهارم
شکل5- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی اول به ورودی پنجم
شکل6- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی اول به ورودی ششم
شکل7- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی دوم به ورودی اول
شکل8- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی دوم به ورودی دوم
شکل9- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی دوم به ورودی سوم
شکل10- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی دوم به ورودی چهارم
شکل11- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی دوم به ورودی پنجم
شکل12- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی دوم به ورودی ششم
شکل13- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی سوم به ورودی اول
شکل14- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی سوم به ورودی دوم
شکل15- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی سوم به ورودی سوم
شکل16- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی سوم به ورودی چهارم
شکل17- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی سوم به ورودی پنجم
شکل18- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی سوم به ورودی ششم
شکل19- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی چهارم به ورودی اول
شکل20- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی چهارم به ورودی دوم
شکل21- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی چهارم به ورودی سوم
شکل22- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی چهارم به ورودی چهارم
شکل23- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی چهارم به ورودی پنجم
شکل24- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی چهارم به ورودی ششم
شکل25- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی پنجم به ورودی اول
شکل26- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی پنجم به ورودی دوم
شکل27- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی پنجم به ورودی سوم
شکل28- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی پنجم به ورودی چهارم
شکل29- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی پنجم به ورودی پنجم
شکل30- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی پنجم به ورودی ششم
شکل31- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی ششم به ورودی اول
شکل32- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی ششم به ورودی دوم
شکل33- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی ششم به ورودی سوم
شکل34- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی ششم به ورودی چهارم
شکل35- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی ششم به ورودی پنجم
شکل36- دیاگرام بود، نایکوییست و مکان هندسی نسبت خروجی ششم به ورودی ششم
****نکته:
لازم بذکر است که نمودارهایی که دارای دیاگرام بود و نایکوییست و مکان هندسی نیستند و خالی میباشند به این معنا است که بین ان خروجی و ورودی رابطه ای تعریف نشده است.
شکل37- نمودار حالت های سیستم در حضور فیدبک و رویتگر حالت.
کلید واژه : Wind Generation, Doubly Fed Induction Generator, Inter-Area Oscillation
پروژه کنترل مدرن با استفاده از سیستم مقاله
Control of DFIG based Wind Generation to Improve Inter-Area Oscillation Damping
مطابق توضیحات فوق تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





