
توضیحات
Attitude regulation for unmanned quadrotors using adaptive fuzzy gain-scheduling sliding mode control
تنظیم و کنترل آرایش ربات کوادروتور با استفاده از روش تطبیقی مدلغزشی- فازی
چکیده:
این مقاله به حل مشکل تنظیم آرایش ربات کوادروتور با در نظرگرفتن، عدم قطعیت پارامتری و اغتشاشات تحمیل شده بر سیستم می پردازد.
یک روش جدید تطبیقی مدلغزشی- فازی به منظور کنترل آرایش ربات پیشنهاد می گردد.
ابتدا معادلات دینامیکی و سینماتیکی حاکم بر حرکت دورانی کوادروتور مشتق می گردد و مسئله تنظیم آرایش ربات فرمولبندی می گردد، سپس یک کنترل کننده مدلغزشی به منظور تنظیم آرایش ربات در حصور عدم قطعیت های پارامتری و اغتشاشات خارجی طراحی می گردد.
پایداری جهانی و همگرایی خطا به سمت صفر برای کنترل کننده طراحی شده نشان داده می شود.
به جهت کاهش پدیده چترینگ ایجاد شده ناشی از تابع سوئیچینگ موجود در کنترل کننده طراحی شده یک سیستم تنظیم فازی ارائه می گردد که با استفاده از آن بهره تابع سوئیچینگ تنظیم می گردد.
در این سیستم فازی صفحه لغزش و مشتق آن به عنوان ورودی و بهره تابع سوئیچینگ به عنوان خروجی تعریف شده است.
در نهایت موثر بودن و مقاوم بودن رویکرد کنترلی پیشنهادی با استفاده از شبیه سازی نشان داده شده است.
نتایج حاصل از شبیه سازی برای هر کدام از روش های کنترلی ارائه شده در مقاله به صورت زیر ارائه شده است:
-
روش رایج مدلغزشی (SMC)
با اجرای این شبیه سازی نتایج زیر را مشاهده خواهید نمود:
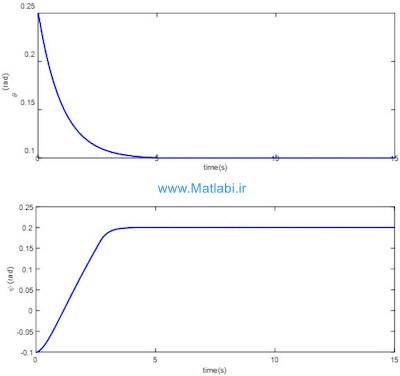
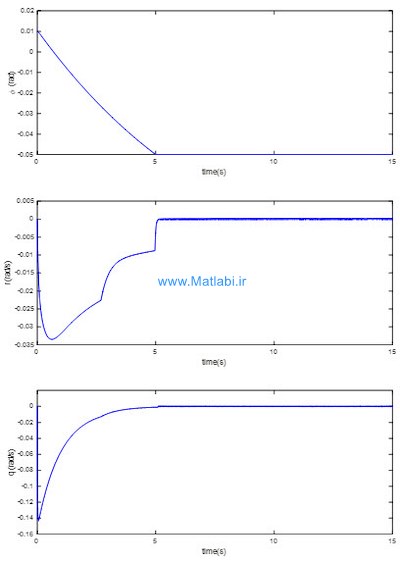
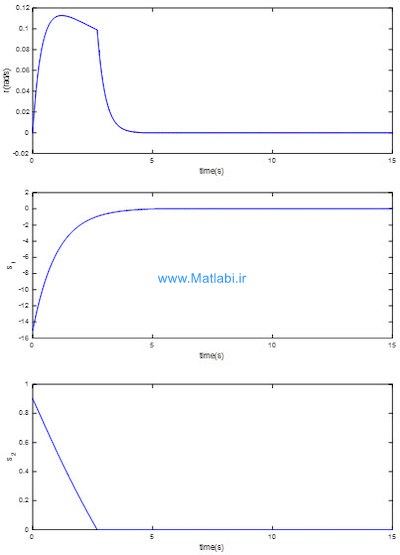
وجود پدیده چترینگ در سیستم مشهود است.
-
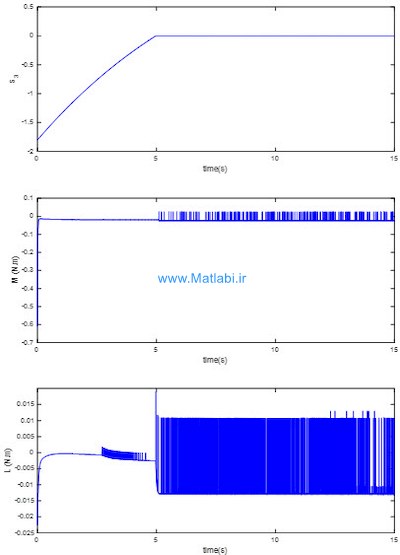
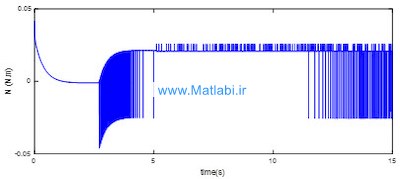
روش لایه مرزی مدلغزشی (BL-SMC)


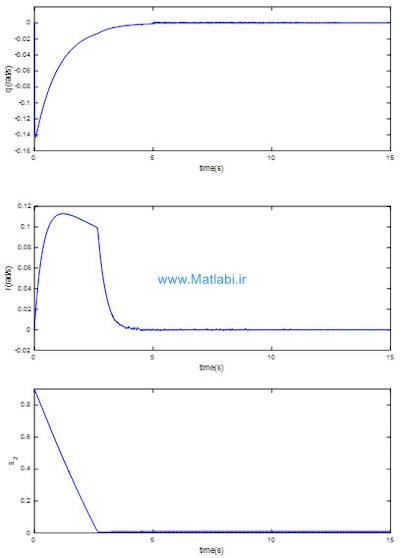
در این روش همچنان پدیده چترینگ وجود دارد اما به نسبت روش رایج، کاهش یافته است.
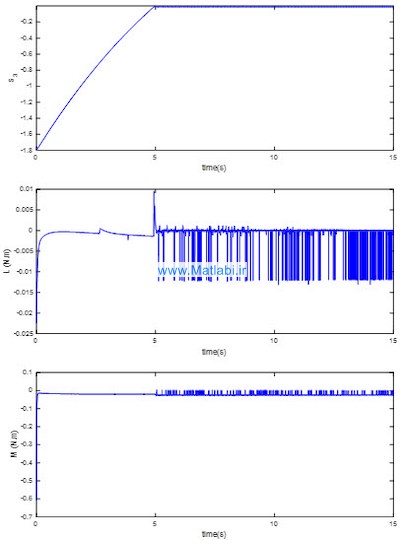
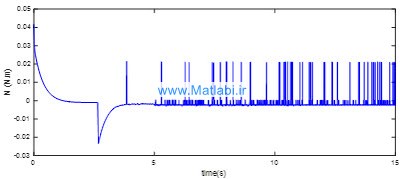
روش تطبیقی فازی – مدلغزشی
- طراحی سیستم تنظیم بهره تابع سوئیچینگ با استفاده از سیستم فازی
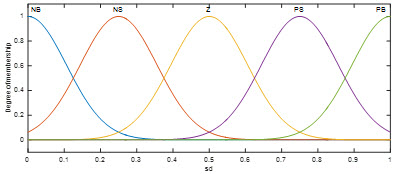
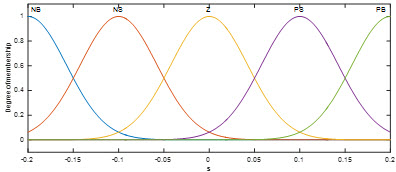
نوع خروجی تابع سوگنو نیز به صورت ثابت انتخاب شده است.
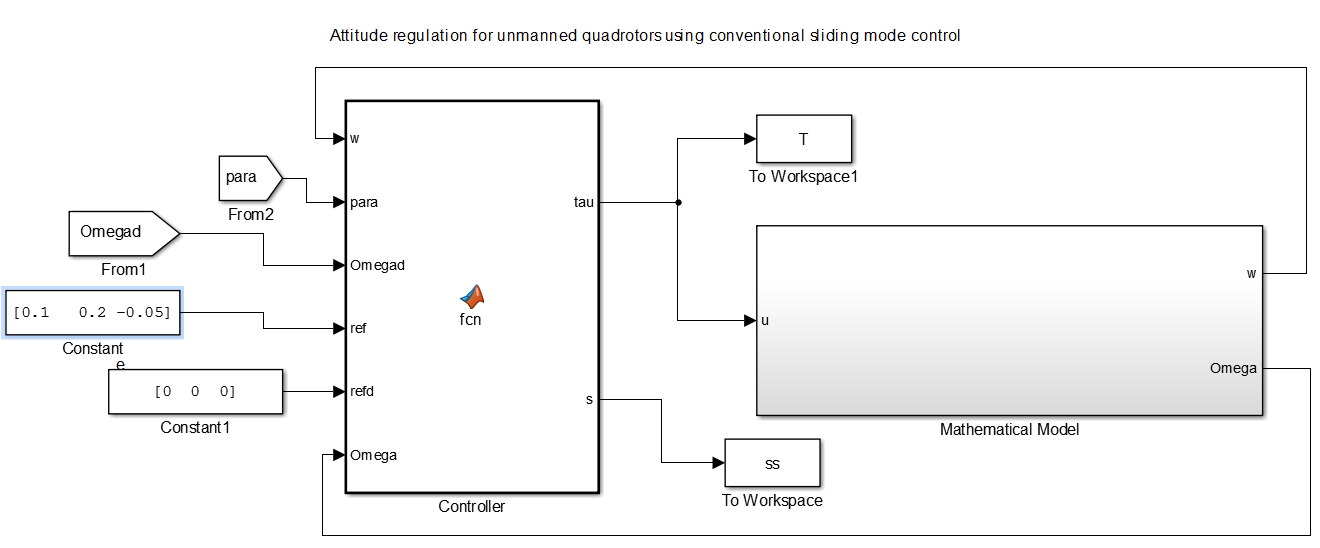
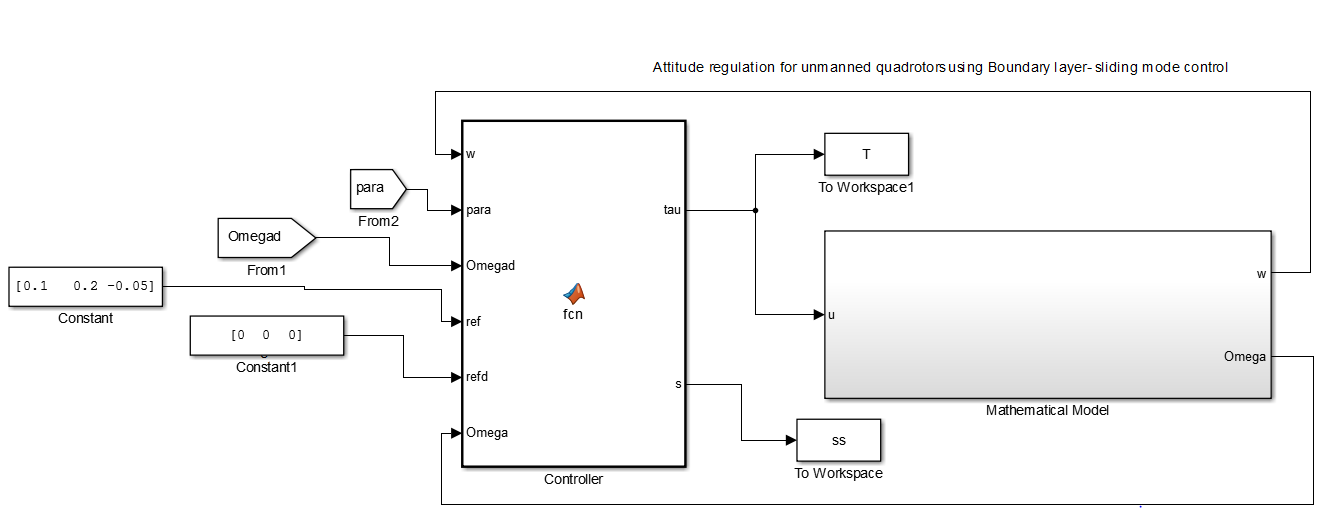
- شبیه سازی در محیط سیمولینک:
…
نتایج:
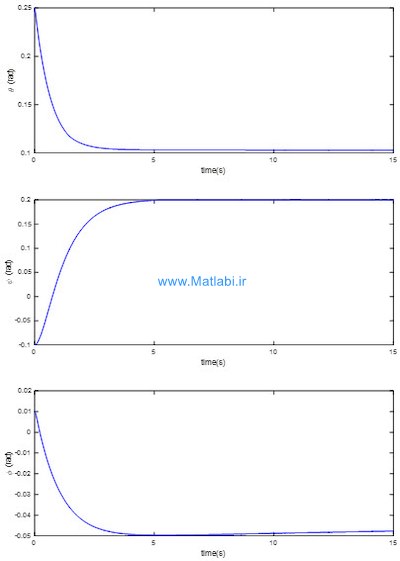
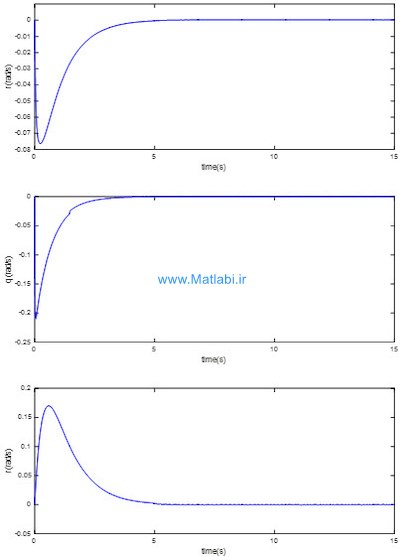
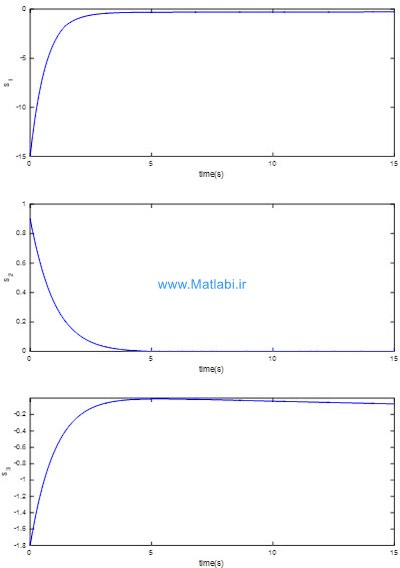
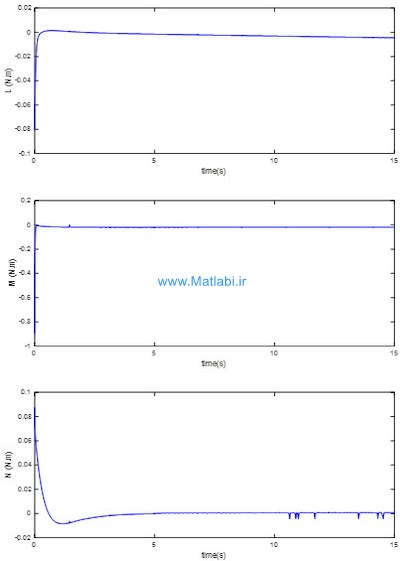
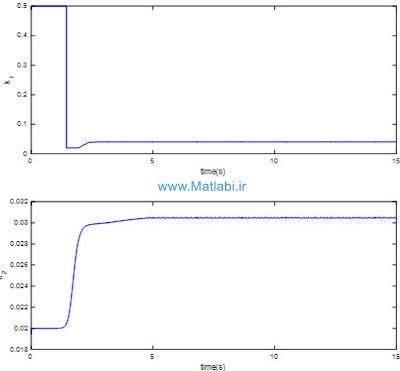
همانطور که مشاهده می شود پدیده چترینک در سیستم تطبیقی فازی – مدلغزشی به خوبی کاهش یافته است.
نکته:
- نتایج ارائه شده در گزارش با اجرای هر کدام سه فایل شبیه سازی شده در سیمولینک به صورت اتوماتیک مشاهده می گردد.
- شبیه سازی ها در سیمولینک مربوط به مطلب 2015b انجام شده است، بنابراین به منظور جلوگیری از بروز مشکل سعی نمایید از این ورژن مطلب استفاده نمایید.
کلیدواژه:
Attitude control,Sliding mode control,Fuzzy rules,Gain scheduling,Robustness,Quadrotor
شبیه سازی مقاله
Attitude regulation for unmanned quadrotors using adaptive fuzzy gain-scheduling sliding mode control
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.