
توضیحات
Time-varying sliding-coefficient-based decoupled terminal sliding-mode control for a class of fourth-order systems
A time-varying sliding-coefficient-based decoupled terminal sliding mode control strategy is presented for a class of fourth-order systems. First, the fourth-order system is decoupled into two second-order subsystems.
The sliding surface of each subsystem was designed by utilizing time-varying coefficients.
Then, the control target of one subsystem to another subsystem was embedded.
Thereafter, a terminal sliding mode control method was utilized to make both subsystems converge to their equilibrium points in finite time.
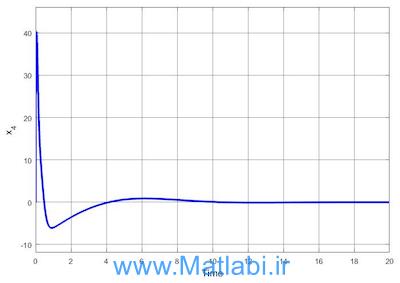
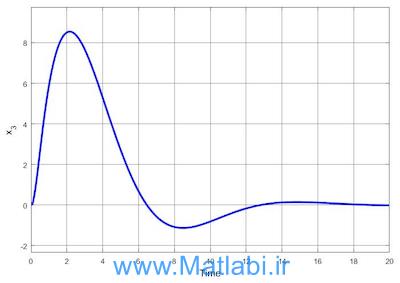
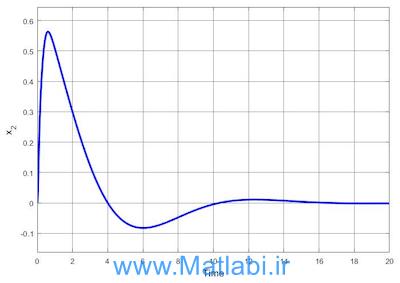
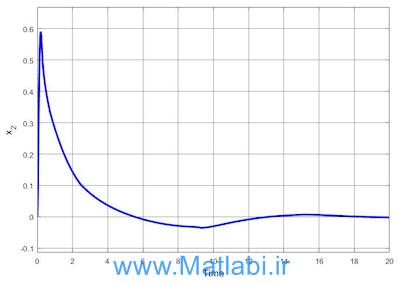
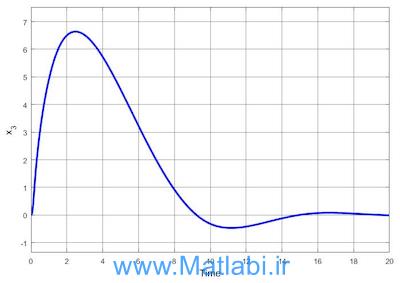
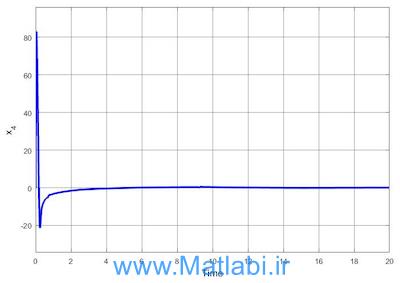
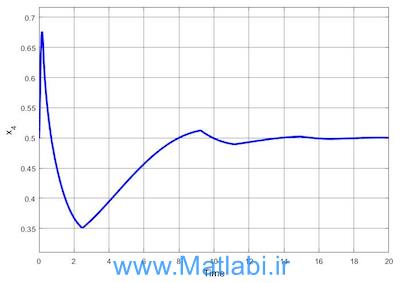
The simulation results on the inverted pendulum system demonstrate that the proposed method exhibits a considerable improvement in terms of a faster dynamic response and lower IAE and ITAE values as compared with the existing decoupled control methods.
شبیه سازی با متلب 2015b انجام شده است.
نتایج برای دو حالت زیر بدست آمده است:
CartPole_DSMC.mdl

و CartPole_Proposed.mdl


تمامی روابط بخوبی پیاده سازی شده اند و نتایج منطقی بدست آمده. اما نتایج شبیه مقاله نیست
کلید واژه:پروژه متلب,شبیه سازی با متلب
Sliding-mode control, Decoupled sliding-mode control, Terminal sliding-mode control, Finite time convergence
شبیه سازی مقاله Time-varying sliding-coefficient-based decoupled terminal sliding-mode control for a class of fourth-order systems
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.