توضیحات
Modeling and Simulation of Solar PV and DFIG Based Wind Hybrid System
مدلسازی و شبیهسازی سیستم هیبرید PV خورشیدی و بادی مبتنی بر DFIG
ترجمه مقاله Modeling and Simulation of Solar PV and DFIG Based Wind Hybrid System :
چکیده
تقاضای روزافزون انرژی و کاهش سوختهای فسیلی آگاهی عمومی نسبت به جستجوی منابع انرژی جایگزین را بالا برده است، در نتیجه، انرژیهای پایانناپذیر خورشیدی و بادی به یک موضوع جالب تبدیل شده و توجه محققان را برای تبدیل آنها به توان پایدار جلب کرده است. هدف از این مقاله فراهم آوردن توان پایدار برای مناطق روستایی و مکانهای دورافتاده میباشد. این مقاله، ساختار یک سیستم هیبرید را ارائه میدهد. سیستم پیشنهادی متشکل از PV خورشیدی و توربین بادی مبتنی بر ژنراتور القایی دو سو تغذیه (DFIG) است. در PV ی خورشیدی روش MPPT برای به ماکزیمم سازی توان و مبدل بوست برای افزایش ولتاژ dc سلولهای فتوولتائیک خورشیدی استفاده شده و سپس به اینورتر سه فاز PWM اعمال شده است. ژنراتور القایی دو سو تغذیه (DFIG) دارای دو کنترلکننده، کنترل سمت روتور و کنترل سمت شبکه است. مبدل سمت روتور و مبدل سمت شبکه دارای قابلیت تزریق و یا جذب توان رأکتیو برای حفظ سرعت ثابت روتور میباشد و ولتاژ لینک dc را کنترل میکند، اینورتر ac-dc-ac با استفاده از روش کنترل برداری اجرا شده است. مطالعه شبیهسازی سیستم پیشنهادی با MATLAB/SIMULINK انجام شده و نتایج شبیهسازی نیز ارائه شده است.
کلمات کلیدی: سیستم هیبریدی، DFIG، سلول PV، MPPT، مبدل
1. مقدمه
سیستم هیبریدی، هیبریدی از دو یا چند منبع انرژی است که انرژی مؤثری را تولید میکند. امروزه، سیستم انرژی هیبریدی (HES) بهویژه در مناطق روستایی و دورافتاده دورنمای بهتری دارند. چرا که این مناطق به دلیل افزایش تقاضا، گرمایش جهانی، کاهش منابع انرژی غیرقابلتجدید از شبکه سراسری تغذیه نمیشوند و مجبور به رفتن به سمت منابع انرژی تجدید پذیر میباشند. سیستمهای هیبریدی بسیاری وجود دارند که در میان آنها انرژی خورشیدی و باد نتایج بهتری ارائه میدهد، چرا که این دو منبع انرژی به وفور در طبیعت یافت میشوند. اشکال انرژی خورشیدی و باد ذات متناوب آنهاست که این انرژیها را غیرقابلاعتماد میکند، اما با ترکیب انرژی خورشیدی و باد قابلیت اطمینان سیستم را میتوان افزایش داد.
اغلب انرژی خورشیدی و باد به وفور در طبیعت یافت میشوند، زمانی که خورشید نیست مقدار زیادی باد وجود دارد و برعکس. در حال حاضر، با ارائه کمکهای مالی برای صفحات خورشیدی توسط دولت، میزان تولید انرژی تجدید پذیر در خال افزایش میباشد. برای دنبال کردن نقطه توان ماکزیمم در PV خورشیدی از MPPT استفاده میکنیم که برای آرایه خورشیدی بسیار ضروری است. در مقاله مروری [1] روشهای MPPT بسیاری مورد بحث قرار گرفته است. باد مستقل در مناطق روستایی در دسترس است و میتوانیم از آن استفاده کنیم. توربین بادی (WT) مبتنی بر DFIG که به طور معمول برای تولید برق در مقیاس بزرگ ترجیح داده میشود، استفاده شده است [2]. مبدلهای به کار رفته در این توپولوژی تنها %30 – 20 کل ظرفیت توان خروجی را استفاده میکنند[3]. مزیت عمده دیگر آن این است که میتوانیم به طور مستقل هر دو توان اکتیو و رأکتیو را کنترل کنیم. کنترلکننده مبدل از بردار d-q استفاده میکند.
2. سیستم پیشنهادی
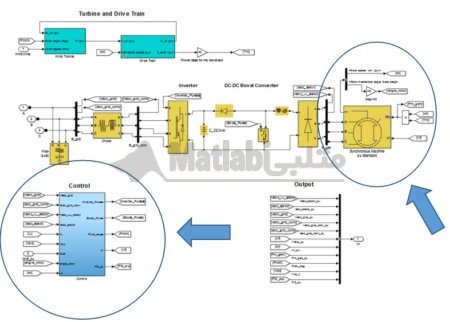
شکل 1 بلوک دیاگرام سیستم پیشنهادی را نشان میدهد. خروجی صفحه خورشیدی برای بالا بردن ولتاژ dc به مبدل بوست و آن هم به اینورتر سه فاز متصل شده است. خروجی اینورتر به شبکه وصل شده و خروجی DFIG نیز به طور مستقیم به شبکه متصل میباشد.
…
شکل 1. بلوک دیاگرام سیستم پیشنهادی
3. توضیحات سیستم PV خورشیدی
در سیستم PV انرژی نور خورشید بر اساس مفهوم اثر فتوولتائیک به برق تبدیل میشود. این جریان نوری به تابش و دما بستگی دارد. هر چه تابش بالاتر باشد، جریان آزاد شده توسط سلول بیشتر خواهد بود.
مدار معادل یک سلول فتوولتائیک در شکل 2 نشان داده شده است. سلول خورشیدی ایده آل توسط یک منبع جریان و دیود موازی با آن نشان داده میشود. چون هیچ سلول خورشیدی ایده آلی وجود ندارد، مقاومت سری Rs با مقدار بسیار کوچک و مقاومت معادل شنت Rsh با مقدار بسیار بالا در مدل سلول در نظر گرفته میشود. معادله سلول PV (1) به شرح زیر است:
…
که در آن Ipv، جریان تولید شده سلول توسط نور تابشی است، که به تابش خورشید و دمای سلول بستگی دارد، Io اشباع معکوس و یا جریان نشتی دیود است، VT نیز ولتاژ حرارتی است.
…
شکل 2. مدل SIMULINK سلول خورشیدی با استفاده از یک دیود
4. بررسی الگوریتم MPPT
عملکرد سیستم تبدیل انرژی PV در نقطه ماکزیمم توان برای به دست آوردن حداکثر توان خروجی از سیستم PV بسیار مهم است. در این مقاله، روش هدایت افزایشی برای به دست آوردن نقطه توان ماکزیمم استفاده میشود، زمانی که
dp/dv = 0 که در آن p = vi
d(vi)/dv = i + v × di/dv = 0, di/dv = -i/v
تنظیمکننده انتگرالی خطا را به حداقل میرساند (di/dv + i/v)
خروجی تنظیمکننده = تصحیح دوره کاری
الگوریتم هدایت افزایشی به شرح زیر است:
گام اول: ولتاژ و جریان صفحه خورشیدی سنجیده شده و به کنترلکننده MPPT ارائه میشود.
گام دوم: کنترلکننده MPPT مقادیر حاضر ولتاژ و جریان را با مقادیر گذشته مقایسه میکند که اختلاف ∆V و ∆I را به دست میدهد:
∆V = Vnew – Vold
∆I = Inew – Iold
گام سوم: نقطه ماکزیمم توان با در نظر گرفتن شیب ∆I/∆V تعقیب میشود.
گام چهارم: با اضافه کردن هدایت لحظهای i/v به هدایت افزایشی سیگنال خطا را به دست میآید:
e = di/dv + i/v
گام پنجم: برای به حداقل رساندن خطا و یا راندن e به صفر، این خطا به کنترلکننده PI داده میشود.
گام ششم: کنترلکننده PI یک دوره کاری تولید میکند که برای تولید پالسهای PWM به مقایسه کننده داده میشود. پالسهای PWM تولید شده به دستگاه سوئیچینگ مبدل بوست داده میشوند.
گام هفتم: مراحل فوق تا زمان رسیدن به حداکثر توان تکرار خواهد شد.
شکل 3 اجرای MPPT را در سیستم خورشیدی نشان میدهد.
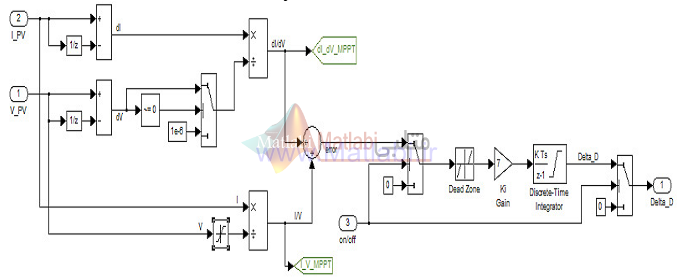
شکل 3. کنترل مدل MPPT در SIMULINK
5. مبدل بوست
مبدل بوست یک مبدل برق dc به dc با ولتاژ خروجی بیشتر از ولتاژ ورودی است که سوئیچ آن ممکن است IGBT، MOSFET، BJT و غیره باشد. مبدل بوست شامل حداقل دو دستگاه نیمههادی است. خروجی مبدل بوست به اینورتر سه فاز داده شده است. کنترلکننده MPPT پالسهای PWM را به IGBT میدهد تا ولتاژ خروجی ثابت نگهداشته شود.
5.1. معادلات طراحی
سلف: سلف همیشه باید جریان نامی بالاتر از حداکثر جریان داشته باشد، زیرا جریان با کاهش اندوکتانس افزایش مییابد:
![]()
Vin: ولتاژ خروجی معمولی، Vout: ولتاژ خروجی مورد نظر، fs: حداقل سوئیچینگ مبدل، ∆Il: ریپل برآورد شده جریان سلف، Iout: حداکثر جریان خروجی لازم در کاربرد مورد نظر. یک برآورد خوب برای ریپل جریان سلف %20 و %30 جریان خروجی است.
![]()
ظرفیت خازن خروجی: با جبران سازی خارجی، معادلات زیر را میتوان برای تنظیم مقادیر خروجی خازن برای ریپل ولتاژ مطلوب استفاده کرد:
![]()
Cout(min): حداقل ظرفیت خازن خروجی، Iout(max): حداکثر خروجی در کاربرد مورد نظر است.
6. اینورتر NPC سه سطحی dc-ac
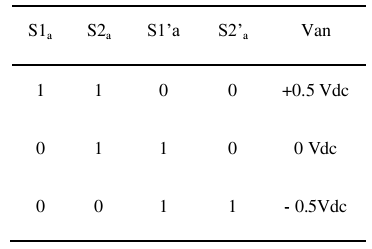
اینورتر سه سطحی کلمپ نقطه خنثی [Neutral Point-Clamped] در این کار به صورت نشان داده شده در شکل 4 استفاده میشود. سه فاز اینورتر یک باس dc مشترک دارند. اینورتر NPC متشکل از دو خازن سری C1 و C2 است. خازنهای لینک dc ولتاژ باس dc را به سه سطح تقسیم میکنند، به نامهای 0.5 Vdc، 0 و -0.5 Vdc. دو جفت سوئیچ مکمل (S1a، S1′a) و (S2a، S2′a) و دو دیود کلمپ [محدودکننده] (D1a، D1′a) در هر فاز در این اینورتر وجود دارد. استفاده از اینورتر NPC هارمونیکهای ولتاژ استاتور را کاهش میدهد[6]. به منظور به دست آوردن سه سطح در دو سر ‘a’ و ‘n’ سه ترکیب از سوئیچها در جدول 1 نشان داده شده است.
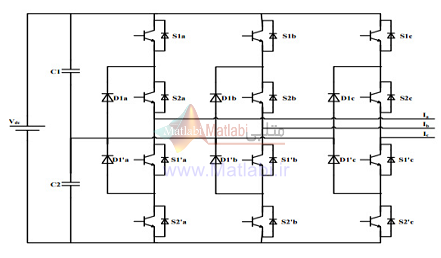
شکل 4. اینورتر کلمپ نقطه خنثی سه سطحی
جدول 1. دنباله سوئیچینگ اینورتر
7. سیستم تبدیل انرژی باد (WECS)
اجزاء سازنده WECS توربین بادی، ژنراتور القایی دو سو تغذیه (DFIG)، و درایو قطار دو جرمی، کنترلکننده زاویه گام و مبدلهای پشتبهپشت هستند.
7.1. مدل توربین بادی
توربین بادی انرژی جنبشی باد را به انرژی مکانیکی تبدیل میکند که توسط شفت به ژنراتور منتقل میشود. در این مقاله، مدل توربین بادی از پیشساخته در نرمافزار SIMULINK برای ارائه گشتاور به ژنراتور استفاده میشود.
7.2. ژنراتور القایی دو سو تغذیه
در WECS، توربین بادی به ژنراتور القایی دو سو تغذیه کوپل شده است. بلوک ژنراتور القایی حلقه لغزشی (ماشین روتور سیمپیچی شده آسنکرون) از SIMULINK انتخاب شده است. علامت گشتاور ورودی تعیین میکند که آیا ماشین به عنوان یک ژنراتور کار میکند و یا به عنوان یک موتور. اگر علامت گشتاور مثبت باشد، به عنوان موتور کار میکند و در صورتی که علامت گشتاور منفی باشد، به عنوان ژنراتور کار میکند.
7.3. کنترلکننده زاویه گام
برای محدود کردن توان نامی در باد شدید و برای سرعت بخشیدن به توربین در باد کم نیاز به یک کنترلکننده زاویه گام داریم. سروو گام به صورت معادله 5 مدلسازی شده است [5]. هنگامی که سرعت ژنراتور بیش از سرعت نامی باشد، کنترلکننده گام به منظور حفظ مقدار نامی ωref = 1.1 p.u. وارد عمل میشود.
![]()
8. کنترل سمت روتور
برای ثابت نگه داشتن ولتاژ استاتور و فرکانس به ولتاژ و فرکانس متغیر روتور لازم است. بنابراین، به مبدل و مدار کنترل برای تغذیه روتور با فرکانس و ولتاژ متغیر برای ثابت نگه داشتن فرکانس استاتور نیاز داریم، و همچنین باید از جریانهای روتور (idr و iqr) استفاده کنیم. بنابراین به پالسهای متغیر PWM برای تولید این پالسها و مقایسه سرعت مرجع (1 p.u.) با سرعت واقعی و ارائه آن به کنترلکننده PI برای تنظیم سرعت نامی روتور نیاز داریم (در این مقاله، بردار شار استاتور با استفاده از Us محاسبه شده است) [4]. برای بهرهبرداری از ماشین در PF واحد توان رأکتیو روی صفر تنظیم میشود. در این طرح اصل کنترل برداری استفاده شده است. تبدیل قاب dq0-abc به مقایسه کننده با موج مثلثی به عنوان حامل پالسهای تولید شده ارائه شده است. شکل 5 طرح کنترل روتور را نشان میدهد.
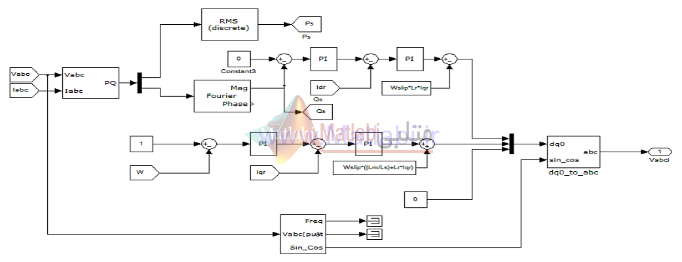
شکل 5. کنترل سمت روتور در SIMULINK
9. کنترل سمت شبکه
از کنترلکننده سمت شبکه برای ثابت نگهداشتن ولتاژ لینک dc استفاده میشود. شکل 6 استراتژی کنترل کنترلکننده سمت شبکه را نشان میدهد. کنترل مبدل در قاب مرجع جهتدهی شده با ولتاژ شبکه کار میکند که یک قاب مرجع دوار به صورت سنکرون است و محور مستقیم آن در امتداد موقعیت بردار ولتاژ شبکه است[2]. برای تنظیم ولتاژ لینک dc کنترلکننده PI استفاده میشود. معادله زیر رفتار دینامیکی خازن لینک dc را توصیف میکند.
![]()
که در آن به در ios و ior به ترتیب جریان لینک dc مبدلهای سمت شبکه و روتور میباشند.
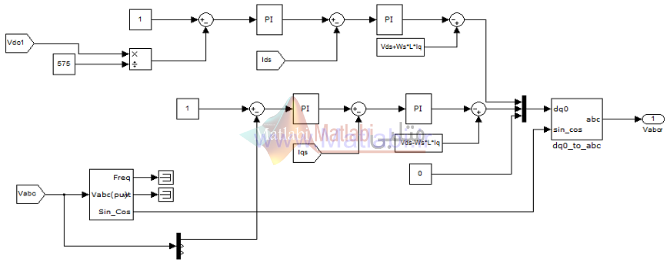
شکل 6. زیرسیستم کنترل سمت شبکه در SIMULINK
10. سیستم هیبریدی
در سیستم هیبریدی تعدادی ژنراتور برق و عناصر ذخیرهسازی انرژی الکتریکی برای برآوردن تقاضای توان الکتریکی مناطق دورافتاده و همچنین مناطق روستایی و یا حتی کل یک جامعه با هم ترکیب شدهاند. سیستم هیبریدی به عنوان یک سیستم قدرت مستقل نیز استفاده میشود، سیستم مستقلی که بدون اتصال به شبکه برق سراسری بار مورد نیاز کاربران را تأمین میکند. در این مقاله PV خورشیدی و WECS برای به دست آوردن یک سیستم هیبریدی، ترکیب شدهاند که به بار قابلترکیب، توان تحویل میدهد. در این مقاله، پارامترهای PV خورشیدی عبارتاند از: تعداد سلولهای سری 4، تعداد سلولهای موازی 89، شدت نور استاندارد 1000 W/m2، دما 25 ̊C. پارامترهای WT عبارتاند از: توان خروجی مکانیکی نامی 250 کیلووات، توان مبنای ژنراتور برق (VA) 250 KVA، سرعت باد پایه 14 m/s. پارامترهای DFIG عبارتاند از: توان اسمی 250 کیلووات، فرکانس 50 هرتز، مقاومت استاتور 0.0108 Ω، مقاومت روتور 0.0121Ω. بلوک SIMULINK سیستم هیبریدی در شکل 7 نشان داده شده است که متشکل از منابع خورشیدی و باد میباشد.
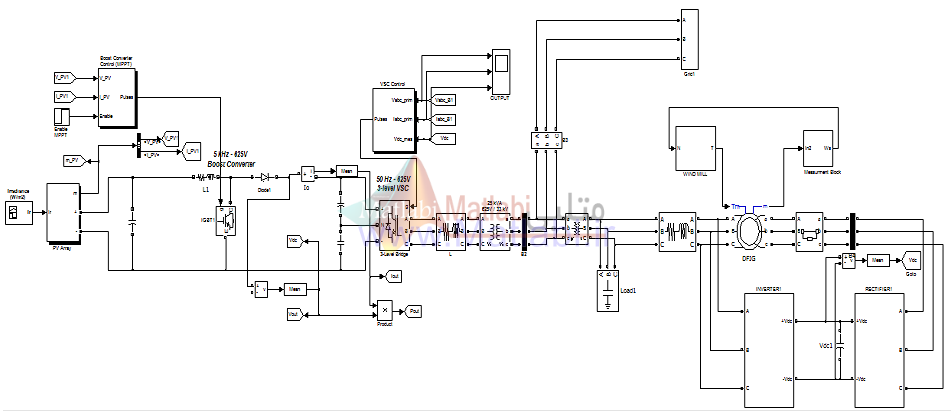
شکل 7. بلوک SIMULINK سیستم هیبریدی
11. نتایج شبیهسازی
پارامترهای صفحه PV، توربین بادی و DFIG، در ضمیمه آورده شده است. شبیهسازی در Matlab 2011b انجام و نتایج زیر ارائه شده است. ولتاژ تولید شده از سیستم PV خورشیدی کافی نیست و از یک مبدل بوست برای افزایش ولتاژ استفاده میشود. ولتاژ خروجی، بدون در نظر گرفتن تغییر ولتاژ صفحه خورشیدی، پس از تقویت 625 V میباشد که در شکل 8 نشان داده شده است. پالسهای آتش سوئیچهای IGBT توسط روش هدایت افزایشی MPPT تولید میشود. ورودی پله به صفحه خورشیدی داده شده است، یعنی، 500 W/m2 تا 0.6 ثانیه و پس از آن 1000 W/m2 ثابت نگهداشته میشود. خروجی مبدل بوست 625 V ثابت میماند. اینورتر PWM سه فاز برای تبدیل ولتاژ تقویت شده از dc به ac استفاده میشود، در نتیجه ولتاژ ac، 625 V در هر فاز به دست آمده است. از آن جا که با اینورتر PWM به دست آمده، به شکل پالس است و به طور کامل سینوسی نیست.
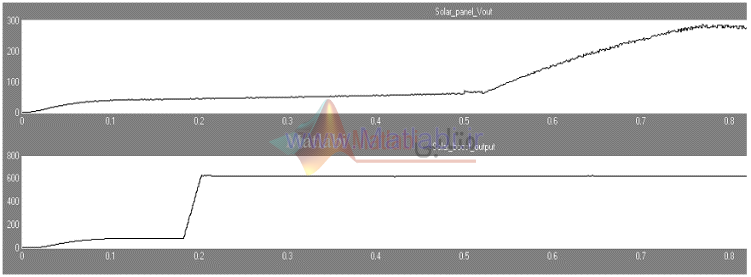
شکل 8. a) خروجی صفحه خورشیدی و b) خروجی مبدل بوست
شکل موجهای شبیهسازی برای یک دوره 0.8 ثانیه با تغییر در سرعت باد در 0.5 ثانیه. یعنی، تا 0.5 ثانیه 4 m/s و بعد از 0.5 ثانیه 14 m/s. شکل 9 سرعت روتور و شکل 10 ولتاژ لینک dc،580 V، را نشان میدهد.

شکل 9. a) سرعت روتور به p.u. و b) سرعت باد
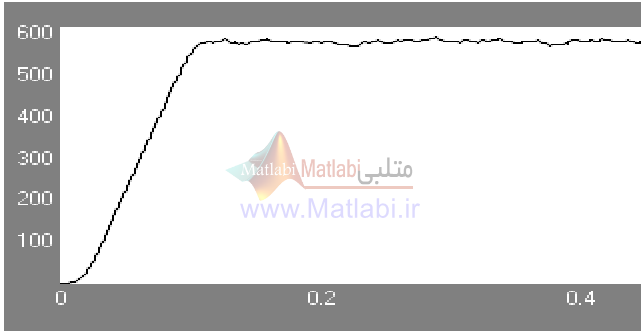
شکل 10. ولتاژ لینک dc
12. نتیجهگیری
استفاده از MPPT در تأسیسات صفحات خورشیدی مزایای زیادی دارد. سرمایهگذاری اولیه آن کمتر است، زیرا صفحه خورشیدی با توان کوچکتر مورد نیاز است. در این مقاله، روش هدایت افزایشی MPPT استفاده شده و خروجی MPPT، برای تولید پالس PWM مورد نیاز مبدل بوست، به مقایسه کننده داده شده است. به منظور بالا بردن ولتاژ صفحات خورشیدی یک مدار مبدل بوست طراحی شده است، برای تبدیل dc-ac، اینورتر NPC سه سطحی و اصل کنترل برداری استفاده شده است. یک منبع انرژی دیگر، توربین بادی مبتنی بر DFIG نیز به کار رفته است. امروزه DFIG در مزارع بادی بسیار استفاده میشود، زیرا در ولتاژ و فرکانس ثابت برق تولید میکند. برای حفظ ولتاژ و فرکانس ثابت نیاز به یک مبدل پشتبهپشت است و یک کنترلکننده نیز برای آن به کار رفته شده است. ویژگیهای DFIG مورد مطالعه قرار گرفته و همچنین تکنیکهای کنترل DFIG در محیط MATLAB/SIMULINK آنالیز شده است. این مقاله با مدلسازی و شبیهسازی یک منبع انرژی هیبریدی یک ساختار برای آن ارائه داده که در آن انرژی خورشیدی و انرژی باد دو منبع به کار رفته میباشند. سیستم PV خورشیدی و بادی مبتنی بر DFIG در MATLAB/SIMULINK ایجاد و شرایط تغییر پله شبیهسازی شده است.
گزارش شبیه سازی:
فصل اول
تشریح پنل خورشیدی و اجزا

پنل خورشیدی:
سلول خورشیدی می تواند به صورت یک منبع جریان موازی با یک دیود مدل سازی شود. زمانی که هیچ نوری برای تولید جریان وجود ندارد، سلول خورشیدی به عنوان یک دیود عمل می کند. هنگامی که شدت نور تابیده به سلول افزایش می یابد، جریانی متناسب با شدت نور ورودی به وسیله سلول خورشیدی تولید می شود. این جریان نوری بین مقاومت متغیر دیود و بار، با نسبتی که بستگی به مقاومت بار و شدت تابش دارد تقسیم می شود. در یک سلول ایده آل، کل جریان I با جریان تولید شده توسط اثر فتوالکتریک، IL ، منهای جریان دیود ، ID ، برابر است. در مدار معادل دقیق تر سلول خورشیدی به جای یک دیود، دو دیود وجود دارد. با این توضیحات و با استفاده از روابط مربوط به سلول خورشیدی می توان رابطه ای کلی به صورت زیر ارائه داد.

در این رابطه n ضریب ایده آلی دیود (معمولا بین 1 و 2) و RS و RSH به ترتیب مقاومت های سری و موازی (شنت) را نشان می دهد که در ادامه توضیح داده خواهند شد. همچنین مدار معادل با سلول خورشیدی با استفاده از رابطه بالا به صورت زیر خواهد بود.

شکل1) مدار معادل سلول خورشیدی
در طی انجام کار در سلول خورشیدی واقعی، بازده سلول بوسیله اتلاف توان در مقاومت های داخلی از جمله مقاومت اتصالات و همچنین از طریق جریان های نشتی در دو طرف قطعه کم می شود. این مقاومت های پارازیتی همانگونه که در شکل بالا نشان داده شده است، می تواند به عنوان یک مقاومت موازی (RSH) و مقاومت سری (RS) مدل سازی شود. برای یک سلول ایده آل، RSH بی نهایت خواهد بود و مسیر دیگری برای انتشار جریان ایجاد نخواهد شد. همچنین برای سلول ایده آل مقاومت RS صفر خواهد بود که در این صورت منجر به کاهش ولتاژ اضافی قبل از بار نخواهد شد. هنگامی که RSH کاهش می یابد، مقدار VOC افت می کند در حالی که به طور مشابه، افزایش RS باعث کاهش ISC می گردد. در نهایت کاهش مقاومت موازی و افزایش مقاومت سری باعث کاهش ضریب پری (FF) و توان ماکزیمم خواهد بود.

شکل 2) اثر افزایش مقاومت سری و کاهش مقاومت موازی روی توان ماکزیمم. (منحنی های بیرونی در هردو حالت برای RS=0 و RSH=∞ است)
مقاومت های سری و موازی را می توان تقریبا از روی شیب منحنی I – V به ترتیب در نقاط VOC و ISC به دست آورد.

شکل 3) بدست آوردن مقاومت های سری و موازی از روی منحنی I – V
مقاومت سری برخواسته از مقاومت ماده سلول در برابر شارش جریان، مخصوصا از طریق سطح بالایی به اتصالات، و همچنین اتصالات مقاومتی است. مقاومت سری در چگالی جریان های بالا، برای مثال تحت نور متمرکز شده یک مشکل خاص به شمار می رود. مقاومت موازی نیز در اثر نشت جریان از طریق سلول در اطراف لبه های قطعه و بین اتصالات قطب های مختلف ایجاد می شود .
ردیابی حداکثر توان ماکزیمم(MPPT):
از آنجایی که مردم نگران پایان پذیري سوخت هاي فسیلی و مشکلات محیطی ایجاد شده در اثر مصرف انرژي متعارف هستند، در حال حاضر استفاده از منابع انرژي تجدید پذیر ، به خصوص پانل هاي خورشیدي گسترش یافته است. باتریهاي خورشیدي یا سلول هاي خورشیدي ابزارهاي الکترونیکی هستند که با استفاده از پدیده فتوولتائیک ، نور یا فتون را مستقیما به جریان یا ولتاژ الکتریکی تبدیل می کنند . امروزه از سلول هاي خورشیدي در بسیاري از موارد استفاده می شود . از قبیل شارژ باتري و… عدم نیاز به نگهداري و تعمیر و همچنین عدم ایجاد آلودگی از مزیت هاي این منابع می باشد ولی در برخی موارد کاربردي براي هستند . در سال هاي dc/ac یا dc/dc تغذیه بار ، نیازمند مبدل
اخیر تکنولوژي ساخت نیمه هادي هاي انرژي ، باعث تبدیل شده است ولی از آنجایی که سلول هاي dc و ac آسان تر بین خورشیدي هنوز داراي بازده تبدیل نسبتا پایینی هستند می توان با استفاده از ترفند هاي سري و موازي کردن ، علاوه به رسیدن به توان قابل قبول هزینه ها را نیز کاهش داد .
انرژي خورشیدي می تواند به دو روش به کار رود : گرم کننده /خنک کننده خورشیدي و و برق خورشیدي . بعضی دستگاه ها عمل می کنند . دستگاه هاي دیگر ممکن است براي dc در ولتاژ
تعدیل ولتاژ نیازمند آداپتور ولتاژ یا اینورتر براي افزایش ولتاژ و باشند. با یک تکنیک بسیار ساده ، ولتاژ و (MPPT) تکنیک ردیابی نقطه حداکثر توان یا جریان سلول خورشیدي با ولتاژ ثابت مبنا ( یا جریان) در شرایط جوي خاص مقایسه می شود که با ولتاژ( یا جریان )سلول خورشیدي در نقطه توان حداکثر مطابقت دارد .
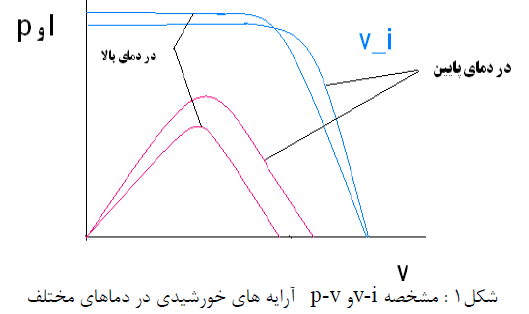
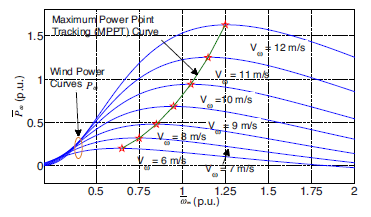
ولتاژ _ ( P-V جریان _ ولتاژ)و ( V-I مشخصه هاي غیر خطی توان) آرایه هاي خورشیدي و وابستگی آنها به دما در شکل 1نشان داده شده است .
هنگامی که ماهواره به ناحیه خورشید گرفتگی وارد می شود ،خروجی آرایه ها کاملا صفر بوده و درست پس از خروج از این ناحیه شاهد افزایش ولتاژ آنها تا بیشترین حد آن خواهیم بود .در نتیجه ولتاژ متناظر با حداکثر قدرت با نوسانات دما در حال تغییر می باشد . لذا براي اینکه بهره برداري در راندمان بالاتر (و با تعداد سلول هاي کمتري) انجام گیرد نیاز به استفاده از مدار دنبال کننده نقطه حداکثر توان می باشد .
روش هاي جذب حداکثر توان سلول هاي خورشیدي
بعضی از روش هایی که خصوصا جهت جذب حداکثر توان آرایه هاي خورشیدي براي تغذیه بار و شارژ باتري ها مورد استفاده قرار می گیرند عبارتند از:
روش اول: با توجه به مشخصه آرایه هاي خورشیدي می توان نشان داد که نسبت ولتاژ بی باري سلول ها به ولتاژ متناظر با نقطه حداکثر توان آنها تقریبا ثابت (بین 0.7 تا 0.75) می باشد . لذا با اندازه گیري ولتاژ بی باري سلول و مقایسه آن با ولتاژ دو سر بار ، فرمان لازم به سیستم کنترل سوئیچینگ تنظیم کننده ولتاژ داده می شود بطوریکه همواره حداکثر توان ممکن به بار منتقل گردد
روش دوم: می توان نشان داد که نسبت جریان اتصال کوتاه سلول ها به جریان متناظر با نقطه حداکثر توان آنها تقریبا ثابت(بین 0.8 تا 0.85) می باشد . با اندازه گیري جریان اتصال کوتاه
سلول و مقایسه آن با جریان بار، فرمان لازم به سیستم کنترل سوئیچینگ تنظیم کننده ولتاژ براي انتقال حداکثر توان ممکن ارائه می شود .
روش سوم: اصولا آرایه هاي خورشیدي توسط مدارهاي سوئیچینگ به باتري ها متصل می شوند . با فرض ثابت بودن ولتاژ باتري در خلال فرآیند سوئیچینگ ، نوسانات جریان نمایانگر نوسانات توان می باشند.
روش چهارم : آرایه هاي خورشیدي بصورت مصنوعی بارگذاري و ولتاژ وجریان آنها بطور پیوسته اندازه گیري می شود. براي تعین نقطه حداکثر توان، ضرایب ولتاژ وجریان اندازه گیري شده به
مدار نمایانگر حداکثر توان ارسال می گردند .
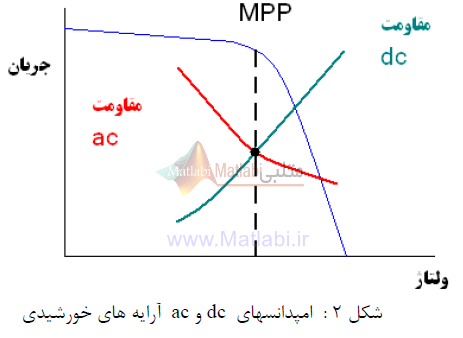
روش پنجم: همانطوري که در شکل 2 نشان داده شده است آرایه هاي خورشیدي در نقطه حداکثر توان dc و ac امپدانسهاي با یکدیگر برابر می شوند . در این روش یک جریان نوسانی به بطور v/i و dv/di آرایه خورشیدي تزریق گردیده وتغییرات پیوسته اندازه گیري می شوند . از این اطلاعات براي تخمین نقطه حداکثر توان آرایه هاي خورشیدي بهره برداري می گردد
روش ششم: وقتی که یک آرایه خورشیدي بارگذاري می شود، نرخ تغییرات قدرت خروجی نسبت به جریان تقریبا خط مستقیمی می شود که از نقطه حداکثر توان می گذرد لذا با تزریق یک سیگنال با فرکانس اغتشاش به آرایه خورشیدي، شرایط تغییرات توان در آرایه را فراهم می نمایند و سپس با توسط مدار کنترل، فرمان لازم جهت dp/dI اندازه گیري پیوسته کار در نقطه حداکثر توان صادر می گردد .
به کمک هر یک از روشهاي فوق می توان فرمان لازم جهت سوئیچینگ کلیدهاي قدرت تنظیم کننده ولتاژ را صادر کرد و حداکثر توان ممکن را جهت تغذیه از آرایه هاي خورشیدي دریافت نمود.
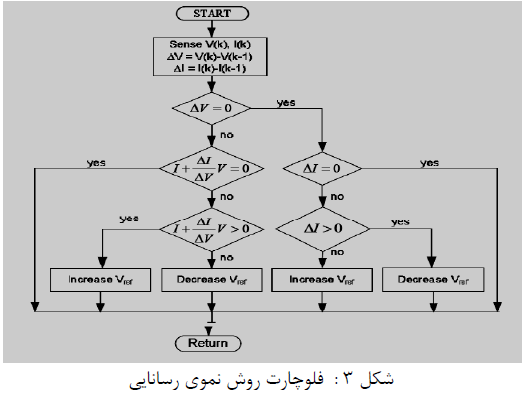
روشهفتم روش نموي رسانایی : یکی دیگر از روشهایی که درزمینه دست یابی به نقطه حداکثر توان بسیار پر کاربرد و دقیق است و در سیستم هایی که نیاز به دقت بالایی دارند ( مثل صنایع فضایی) مورد استفاده قرار می گیرد ، روش نمويdi/dvرسانایی است . در روش نموي رسانایی ، از نموي رسانایی استفاده می شود . dp/dv براي بدست آوردن علامت آرایه هاي خورشیدي در dc و ac می توان نشان داد که رسانایی نقطه حداکثر توان با یکدیگر برابر می باشد . شکل 3 فلوچارت روش نموي رسانایی نشان داده شده است ، در این فلوچارت نویز و خطاي اندازه گیري مشکل ساز می شود . دیگر عیب این روش پیچیدگی آن نسبت به روش هاي دیگر می باشد ، همین دلیل باعث افزایش زمان محاسبات می شود .
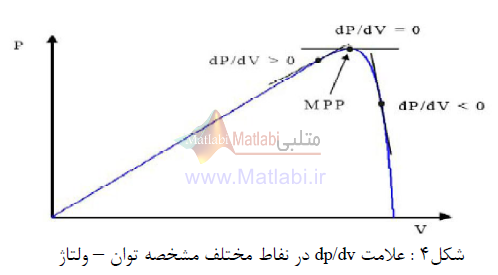
سیستم هاي خورشیدي – فضایی از آن استفاده می شود ، روش مشاهده و دنبال کردن است ، این روش متداول ترین الگوریتم کنترل دنبال کننده نقطه حداکثر توان می باشد . مساوي صفر dp/dv می توان نشان داد که در نقطه حداکثر توان می باشد و قبل از این نقطه این مقدار مثبت و بعد از آن منفی می شود . در این روش از این خاصیت استفاده می شود . شکل4 این مطلب را نشان می دهد .
شکل 5 نیز فلوچارت روش مشاهده و دنبال کردن را نشان می مثبت باشد در همین dp/dv دهد . در فلوچارت مذکور ، اگر dp/dv جهت ادامه داده می شود تا به نقطه اي برسیم که در آن منفی باشد باید در جهت عکس ادامه dp/dv صفر باشد و اگر داده شود تا به نقطه مورد نظر برسیم.

روش پیشنهادي
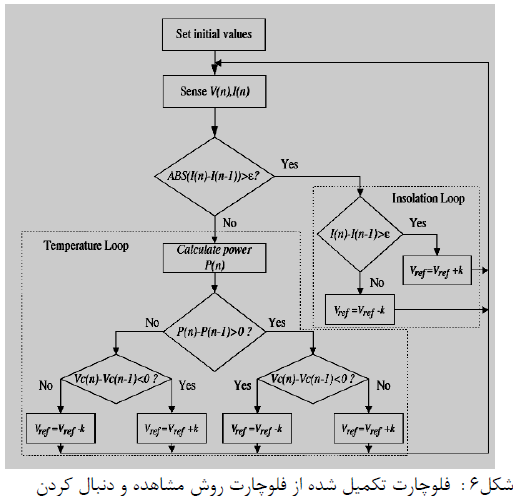
در شکل 6 فلوچارت شکل قبل تکمیل شده و دقت آن نیز با اضافه شدن چند مورد بهبود داده شده است.همان طور که مشاهده می کنید فلوچارت به دو قسمت ، حلقه تابش و حلقه دما تقسیم شده است . در ادامه هر یک از این حلقه ها توضیح داده خواهد شد .
حلقه تابش : با توجه به مشخصه آرایه هاي خورشیدي می توان نشان داد که با افزایش تابش ، جریان اتصال کوتاه افزایش پیدا کرده و نقطه حداکثر توان به سمت ولتاژهاي زیاد جا به جا می شود . در حلقه تابش ، علاوه بر کنترل نقطه حداکثر توان ، از آسیب دیدن سیستم در برابر مشخصه امپدانس منفی نیز جلوگیري می شود .
حلقه دما : حلقه دما در واقع همان فلوچارت روش مشاهده و دنبال کردن می باشد . حلقه دما زمانی شروع به کار می کند که تغییرات تابش ناچیز باشد . با توجه به اینکه مشخصه آرایه خورشیدي با دما تغییر می کند ، نقطه حداکثر توان نیز تغییر می کند که با استفاده از این حلقه می توان این نقطه را دنبال کرد .
تحلیل مبدل ها
براي اینکه بتوان حداکثر توان را از سلول خورشیدي به بار انتقال داد ، نیاز است که بهترین مبدل را انتخاب کرد. به همین دلیل بازده مبدل اهمیت زیادي پیدا می کند .
در شکل زیر مبدل هاي کاهنده ، افزاینده و کاهنده – افزاینده از نظر بازده مورد بررسی قرار گرفته اند
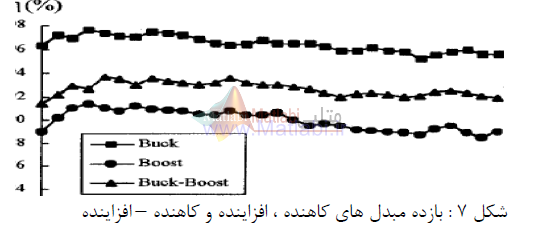
در شکل 7 نمودار بازده مبدل کاهنده با مربع و نمودار بازده مبدل افزاینده با دایره و نمودار بازده مبدل کاهنده – افزاینده با مثلث نشان داده شده است . همان گونه که در شکل بالا مشاهده می شود ، بازده مبدل کاهنده ، از مبدل افزاینده و کاهنده –افزاینده بیشتر می باشد . پس به نظر می رسد انتخاب مبدل کاهنده ، انتخاب مطلوبی باشد .
هم اکنون به طراحی مبدل می پردازیم ، فرکانس سوئیچینگ ماسفت مبدل را 50 کیلو هرتز در نظر می گیریم . ولتاژ ورودي مبدل 17.1 ولت و ولتاژ خروجی آن را 14.5 قرار می دهیم ، دربه صورت زیر می باشد : d ( duty cycle ) این صورت
d= 14.5 / 17.1 = 0.848 = 84%
مقدار سلف نیز با انجام محاسبات زیر بدست می آید :
Lmin = ( 1- d ) R /2f
Lmin = 25.84 μH
L = 0.26 mH
فرض می کنیم جریان خروجی آن 0.88 باشد ، پس مقدار مقاومت به صورت زیر بدست می آید :
R = 14.5 /0.88 = 16.48 Ω
از رابطه زیر حاصل می ، Vo / dVo = مقدار خازن با فرض 0.01شود :
C = (( 1 – d )Vo / dVo) / 8*Lf2
C= 42.38 μF
تشریح شبیه سازی در متلب
در این قسمت از توضیحات به تشریح شبیه سازی و چگونگی عملکرد قسمت سلول خورشیدی در شبیه سازی مذکور می پردازیم. در ایتن قسمت ما به جای استفاده از پنل آماده سلول خورشیدی اقدام به پیاده سازی بلوک دیاگرامی سلول مذکور که نشات گرفته از معادلات حاکم بر مدارمعادل سلول مذکور است می پردازیم.
شکل زیر بلوک پنل خورشیدی طراح شده در این پروژه را نشان می دهد. بلوک مذکور از زیر سیستم هایی به صورت زیر تشکیل شده است که در ادامه تشریح می شوند.
PV Panel
زیر سیستم های مذکور در یک نگاه به شرح زیر می باشند

که تمام پارامترهای مورد استفاده در روابط حاکم بر تئوری مداری سلول خورشیدی در زیر سیستم مذکور مورد استفاده قرار گرفته اند. بخش اصلی زیر سیستم مذکور بلوک سبز رنگی است که خود دارای زیر سیستم هایی برای نمایش بلوک دیاگرامی معادلات به هم پیوسته حاکم بر سلول خورشیدی است که به صورت زیر می باشد.

و در نهایت مشاهده تک تک زیر سیستم های سبز رنگ که هر کدام مسئول پاده سازی قسمتی از معادلات به شدت وابسته سلول خورشیدی به صورت بلوک دیاگرام های سیمولینکی است.
…
فصل دوم
مزارع بادی
بخش هایی از این گزارش در اینجا نیامده و با خرید این محصول قابل دریافت است.
تبدیلabc به قاب مرجع dq0
دینامیک توربین های بادی
کنترل مبدل های DFIG
کنترل مبدل سمت شبکه
تشریح شبیه سازی سیستم بادی در نرم افزار متلب
برای شبیه سازی سیستم بادی در نرم افزار متلب همان طور که در بالا اجزای و روابط مربوطه را تشریح کردیم از بلوک کلی زیر که در نرم افزار متلب در اختیار کابران قرار گرفته است استفاده می کنیم.
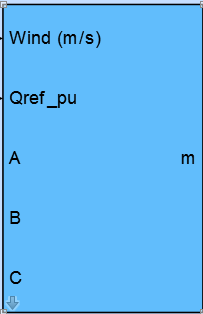
سیستم فوق از زیر سیستم هایی به شرح زیر تشکیل شده است.
…
در حالت کلی زیر سیستم فوق از سه بخش تشکیل شده است
1-توربین و راه انداز
2- مدار اصلی شامل ماشین القایی
3-کنترل های لازم
توربین و راه انداز:
…
مدار اصلی:
…
که خود شامل مدار تقویت کننده DC و مدار اینورتر می باشد
مدارکنترل:
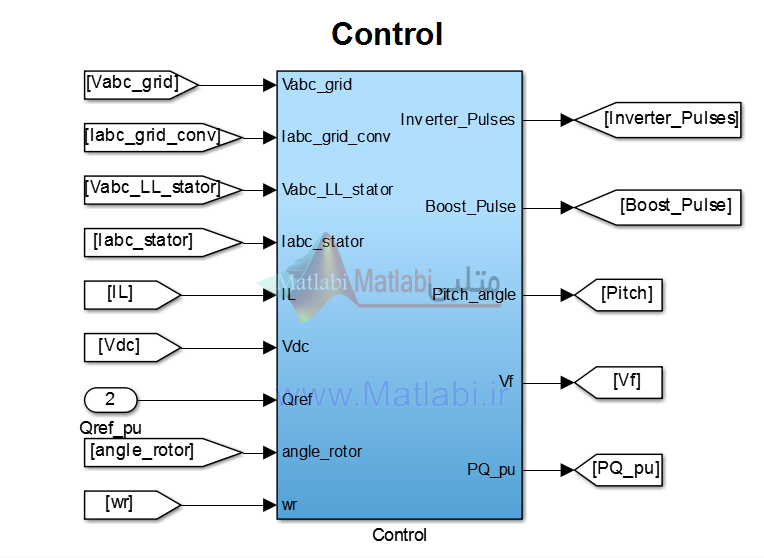
زیر سیستم ها سیستم مذکور به شرح زیر هستند
….
فصل سوم
تشریح سیستم ترکیبی بادی خورشیدی متصل به شبکه
افزایش تقاضای انرژی و تخلیه سوخت ها فسیلی این آگاهی را ایجاد کرده است که به دنبال منابع انرژی متغییری که پایان ناپذر باشند همانند انرژی خورشیدی و انرژی باد که بسار مورد توجه محققان در این زمنه است باشیم.
هدف این شبیه سازی و ترکیب سیستم های بادی و خورشیدی به منظور فراهم کردن انرژی مکفی برا مناطق روستایی و دور از دسترس می باشد. سیستم هدف شامل PV و DFIG است. در PV تکنیک دنبال کردن حداکثر توان(MPPT) و مبدل های BOOST برای بالا بردن ولتاژ خروجی پنل و تغذیه اینورتر با تکنولوژی PWM 3 فاز مورد استفاده قرار گرفته است.
DFIG مورد استفاده در این سیستم از دو کنترلر سمت شبکه و سمت رتور استفاده می کنند که توانایی تولید و ذخیره توان اکتیو و ایجاد سرعت ثابت و کنترل ولتاژ لینک DC را با استفاده از تکنولوژی کنترل برداری را دارا می باشند. (VSI)
سیستم ترکیبی سیستمی است که از 2 یا تعداد بیشتری منبع انرژی که هرکدام مقادیر موثری انرژی را تولید می کنند تشکیل شده است و دلیل ترکیب سیستم ها بدین صورت به جای استفاده از یک منبع انرژی مخصوصا در بحث سیستم های انرژی تجدیدپذیر بالا بردن قابلیت اطمینان بهره برداری از آن ها است.
امروزه سیستم های انرژی ترکیبی در مناطق روستایی و دور از دسترس بسیار مشاهده شده اند زیرا برق رسانی به این مناطق برای شبکه قدرت از لحاظ اقتصادی به صرفه نیست.سیستم های انرژی تجدیدپذیر در مقایسه با سیستم برق رسانی مرکزی برای مناطق روستایی و مناطق دور از دسترس بسیار بهتر است.
بلوک دیاگرام کلی سیستم هدف در زیر ارائه شده است

تشریح شبیه سازی در نرم افزار متلب
پس از تشریح کامل جوانب طرح و همچنین توضیح قسمت های بادی و خورشیدی در نرم افزار، در اینجا به تشریح سایر قسمت های شبیه سازی می پردازیم
دو قسمت PV و DFIG توضیح داده شد و دو قسمت VSI و PWM را تشریح می کنیم
تشریح VSI:
…
بلوک دیاگرام تئوری یک سیستم VSC در زیر ارائه شده است که ما نیز طبق تئور آن را در متلب پیاده سازی کرده ایم

…
Voltage Source Converters (VSC)
Voltage Source Converters operating with the specified vector control strategy can perform independent control of active/reactive power at both ends. This ability of VSC makes it suitable for connection to weak AC networks, i.e. without local voltage sources. For power reversal, the DC voltage polarity remains the same for VSC based transmission system and the power transfer depends only on the direction of the DC current
تشریح PWM:
بلوک دیاگرام کلی سیستم PWM در نرم افزار متلب به شرح زیر است
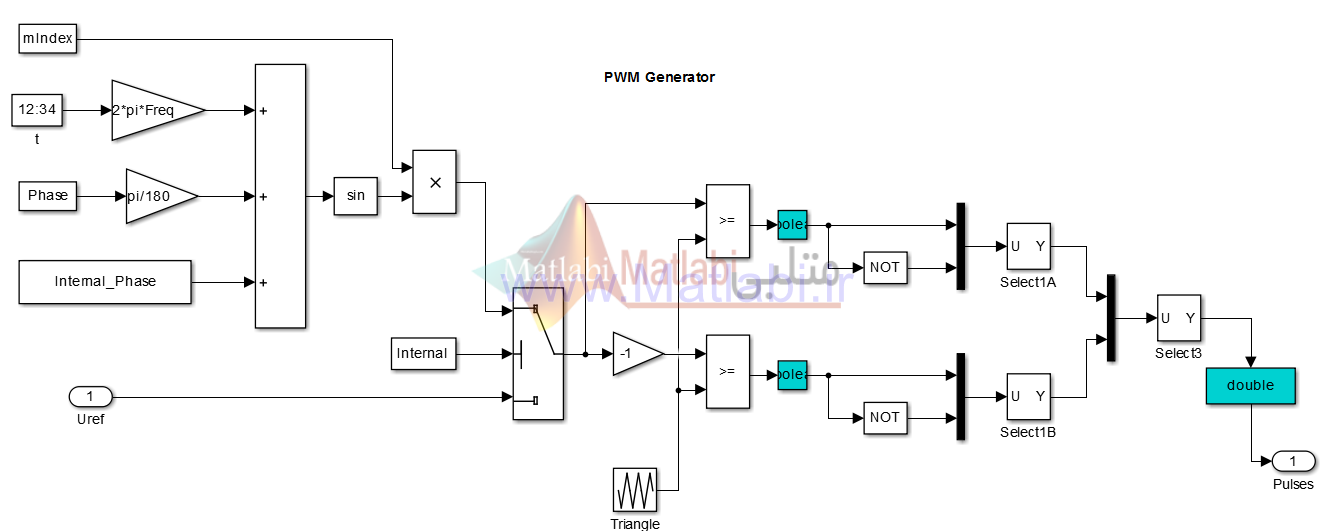
Definition – What does Pulse Width Modulation (PWM) mean?
Pulse-width modulation (PWM) is a modulation process or technique used in most communication systems for encoding the amplitude of a signal right into a pulse width or duration of another signal, usually a carrier signal, for transmission. Although PWM is also used in communications, its main purpose is actually to control the power that is supplied to various types of electrical devices, most especially to inertial loads such as AC/DC motors.
…
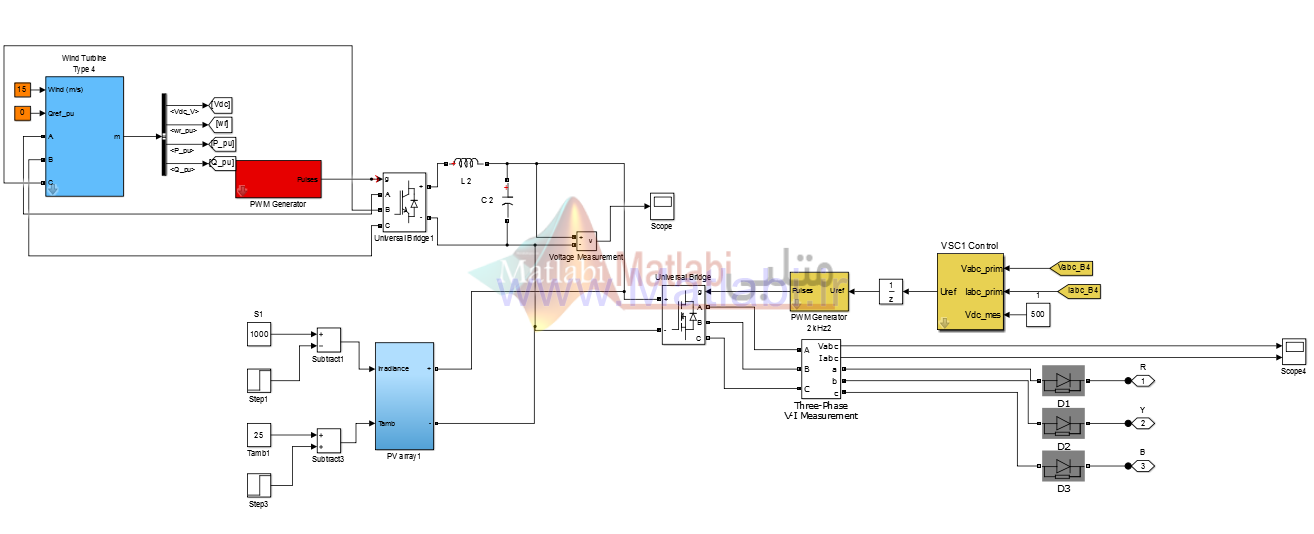
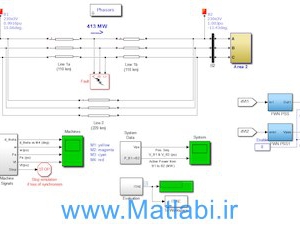
تصویر کلی شبیه سازی در بالا ارائه شده است
قسمت مشخص شده در بالا با کادر آبی رنگ نشان دهنده همان بلوک Grid هست که در مقاله به آن اشاره شده است و در زیر مشخص شده است
همچنین در مقاله مذکور اشاره به مبدل سمت شبکه و مبدل سمت رتور شده است ولی در شکل 7 مقاله اشاره ای به بکارگیری آن در سیستم نشده است یعنی شکل 7 مقاله ناقص است و شکل نهایی مورد استفاده در شبیه سازی نیست.
فقط از موتور القایی آن استفاده شده است
ولی ما در سیستم شبیه سازی شده مذکور از مبدل ها در کنار موتور القایی بهره برده ایم
….
حال به بررسی شکل موج های خروجی و تعیین صحت عملکرد شبیه ساز می پردازیم

شکل موج ولتاژ خروجی از مجموع سیستم خورشیدی و بادی (ترکیبی) مذکور می باشد حال شکل موج بعد از اتصال به شبکه را مشاهده می کنیم
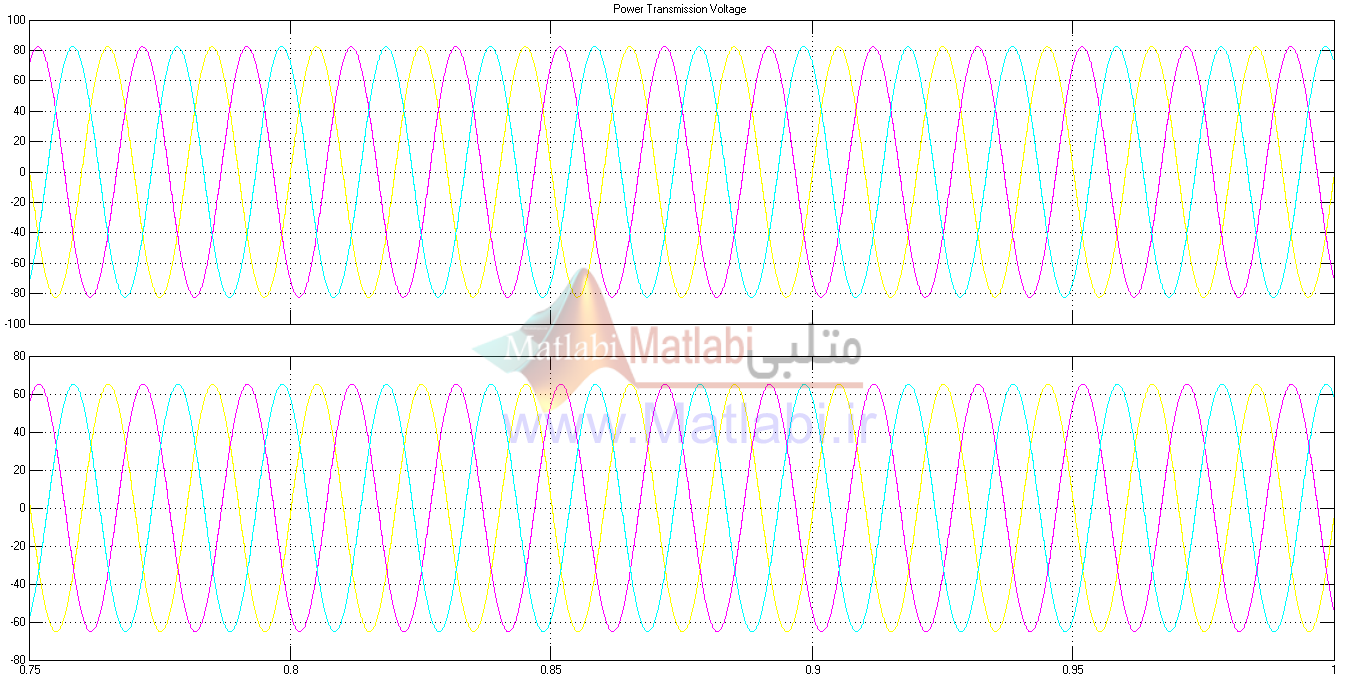
که نشان از عملکرد صحیح اتصال سیستم ترکیبی به GRID اصلی دارد.
کلید واژه:
Hybrid system, DFIG, PV cell, MPPT, Converters,
شبیه سازی مقاله Modeling and Simulation of Solar PV and DFIG Based Wind Hybrid System
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.