توضیحات
Formation Control and Collision Avoidance for Multi-agent Non-holonomic Systems Theory and Experiments
روش جدید برای کنترل و مسیر یابی سیستم های رباتیک چند عاملی
در این مقاله یک روش جدید برای کنترل و مسیر یابی سیستم های رباتیک چند عاملی ارائه شده است. در این مقاله 4 مثال شبیه سازی و چندین مثال عملی ارائه شده است. مثالهای شبیه سازی شده به صورت زیر می باشند:
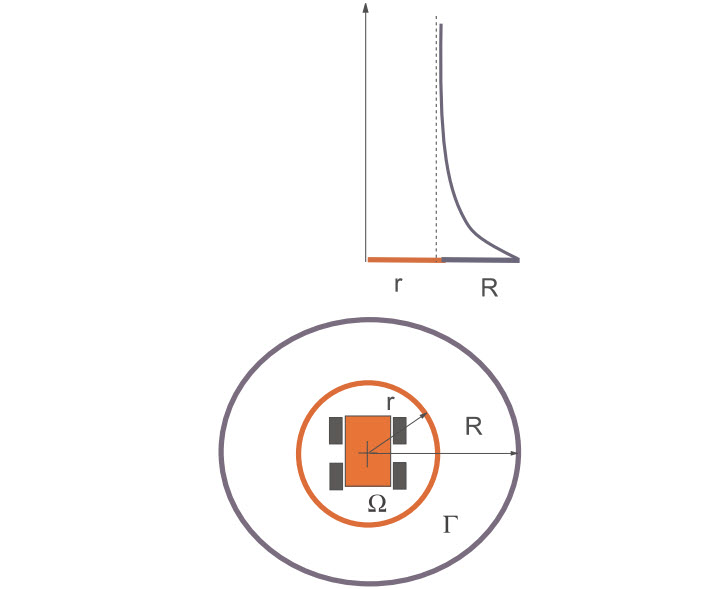
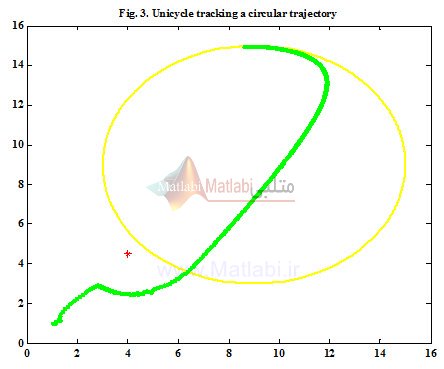
مثال 1: در این مثال باید یک ربات مسیر مورد نظر را که دایره ای می باشد را طی نموده و از تله ها فاصله بگیرد. برنامه نوشته شده برای این مثال مطابق با روابط 1 و 2 و 4 و 5 به صورت زیر می باشد:
% initialization
T=.01;
R=3;r=1;
K_theta=30;K=.9;
x(1)=1;y(1)=1;theta(1)=pi;
xa=4;ya=4.5;
v=0;u=0;t=600*T;
…
پس از اجرای برنامه شکلهای شماره 3 و 4 به صورت زیر بدست می آیند.

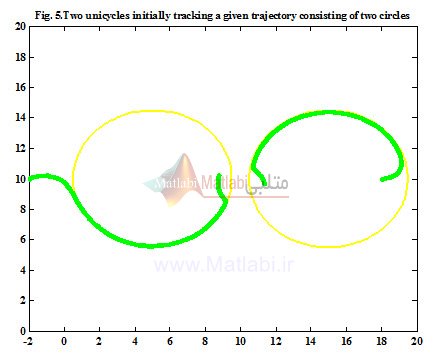
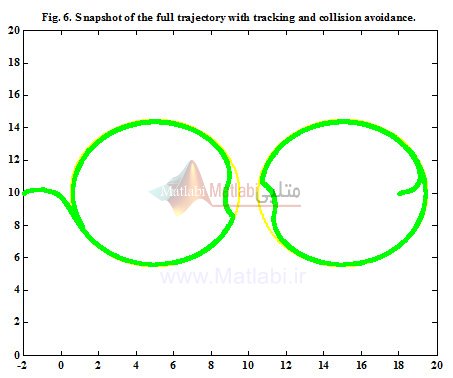
مثال2: در این مثال 2 ربات در نظر گرفته شده که باید هر کدام مسیر دایره ای مورد نظر خودشان را طی نموده و به یکدیگر خیلی نزدیک نشوند. در این مثال هر ربات برای ربات دیگر شبیه تله برای ربات در مثال قبل می باشد. برنامه و نتایج شبیه سازی به صورت زیر می باشد:
% initialization
T=.01;
R=3;r=1;
K_theta=10;K=.5;
x1(1)=-2;y1(1)=10;theta1(1)=0;
x2(1)=18;y2(1)=10;theta2(1)=0;
v1=0;u1=0;v2=0;u2=0;t1=27;t2=-0;
…
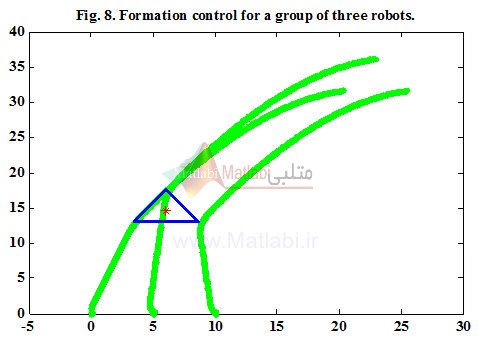
مثال 3 : در این مثال 3 ربات باید یک مسیر را دنبال نموده و فرم مثلثی خود را از دست ندهند. بنابراین ابتدا خود را به نقطه 6 و 14.5 رسانده و برای هریک از ربات ها طبق مسیری که باید دنبال نماید یک مسیر بر اساس روابط بدست آورده و با استفاده از روابط کنترلر داده شده در رابطه 14 ربات ها را کنترل می نماییم. برنامه و نتایج شبیه سازی این مثال به صورت زیر می باشد:
% initialization
T=.01;
R=3;r=1;
K_theta=15;K=.5;
x1(1)=0;y1(1)=0;theta1(1)=pi/4;
x2(1)=5;y2(1)=0;theta2(1)=3*pi/4;
x3(1)=10;y3(1)=0;theta3(1)=3*pi/4;
xd=6;yd=14.5;
d=3;W=0;
v1=0;u1=0;v2=0;u2=0;v3=0;u3=0;
t=30;
M=9000;
…

مثال 4: در این مثال چند ربات باید شتاب را دنبال نمایند. بر اساس روابط 19 و 21 برنامه و نتایج شبیه سازی به صورت زیر می باشد:
% initialization
T=.5;
K=1.5;
x1(1)=0;y1(1)=0;theta1(1)=0;
x2(1)=2;y2(1)=0;theta2(1)=0;
v1=0;u1=0;
v2=0;u2=0;
t=-T;
…

ممکن است اندکی اختلاف بین نتایج شبیه سازی شده و نتایج مقاله وجود داشته باشد که دلیلی آن عدم ارائه تمامی پارامترهای شبیه سازی (K_theta;K) در مقاله می باشد که با سعی و خطا انتخاب شده اند. ولی تحلیل نتایج همانند تحلیل ارائه شده در مقاله می باشد.
بقیه شکلهای ارائه شده در مقاله مربوط به مثالهای عملی می باشند و با متلب نمی توان شبیه سازی نمود.
کلیدواژه:autonomous agents, wheeled robots, distributed robot systems, control of non-holonomic systems, formation control, collision avoidance
شبیه سازی مقاله Formation Control and Collision Avoidance for Multi-agent Non-holonomic Systems Theory and Experiments
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.