توضیحات
Design and Simulation of Control Systems for a Field Survey Mobile Robot Platform
ترجمه فارسی موضوع مقاله: طراحی و شبیه سازی سیستم های کنترل برای بستر های درست ربات موبایل سروی
1 – چكيده :
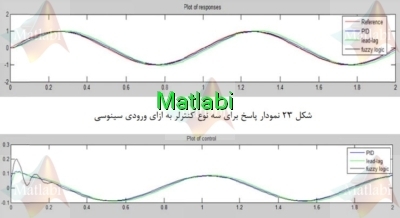
هدف از اين پژوهش طراحي يك سيستم كنترلي اتوماتيك و دقيق براي كنترل سرعت چرخ و هدايت يك Mobile Robot استفاده شده در كشاورزي مي باشد. سه نوع كنترل كننده جبرانساز Fuzzy و PID، Lead-Lag بمنظور كنترل سرعت زاويه اي شفت يك روبات محرك نقشه بردار طراحي و شبيه سازي شده اند. اين ربات با حركت در بين رديف هاي محرك (actuator) موتور DC مشخص شده در محوطه بمنظور تصوير برداري از طريق دوربين ديجيتالي كه روي بازوي دوتكه بر روي ساختار اصلي نصب شده است استفاده مي گردد. پاسخ هاي بدست آمده از شبيه سازي مدل محرك براي هر كنترل كننده به ورودي هاي سينوسي و پله براي ارزيابي سرعت و كنترل موقعيت سيستم بررسي شده است. آناليز عملكرد نشان مي دهد كه جبرانساز Lead-Lag و كنترلر PID در كنترل مسير (هدايت) چرخ ها عملكرد مناسبي دارند در حاليكه كنترلر Fuzzy طراحي شده عملكرد بهتري در كنترل سرعت چرخ ها از خود نشان مي دهد. خروجي شبيه سازي ها نشان دهنده اين است كه طراحي هاي انجام شده معيار هاي عملكرد سيستم را ارضا نموده و موجب بهبودي حركت ربات در حركت هاي سريع ، دقت بيشتر در كنترل سرعت و كنترل نرم مسير حركت در پيچ ها خواهد شد.
نتایج شبیه سازی:
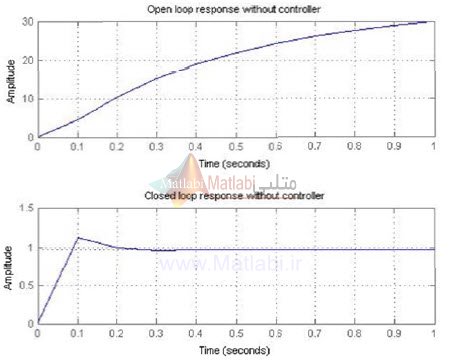
پاسخ حلقه باز و حلقه بسته بدون کنترلر:
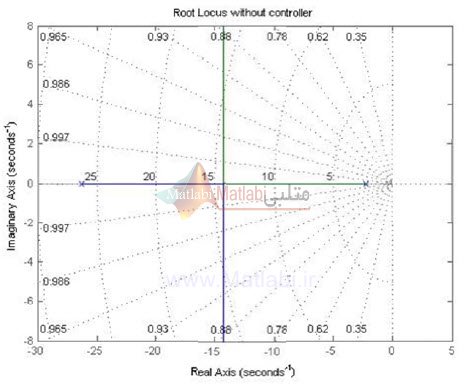
نمودار مکان هندسی ریشه ها بدون اعمال کنترلر:
ظراحی جبرانساز پیش فاز
در مقاله ابتدا یک جبرانساز پیش فاز طراحی شده و سپس برای دستیابی به مقادیر دلخواه یک جبرانساز پیش فاز پس فاز اعمال شده است.
نتایج اعمال این کنترلر ها به صورت زیر است.
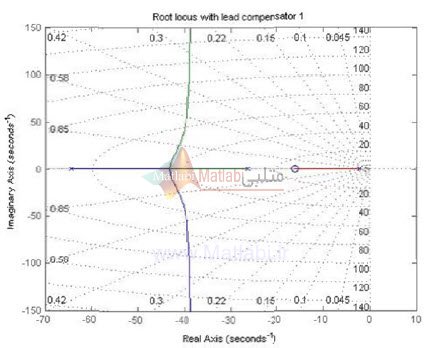
نمودار مکان هندسی ریشه ها با اعمال جبرانساز پیش فاز1 :
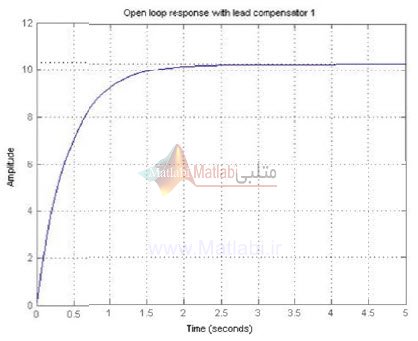
حلقه باز سیستم با اعمال جبرانساز 1
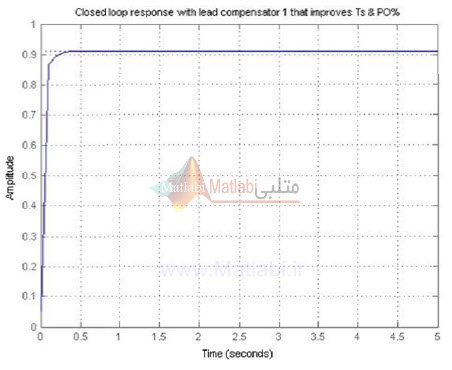
پاسخ حلقه بسته سیستم با اعمال جبرانساز پیش فاز 1
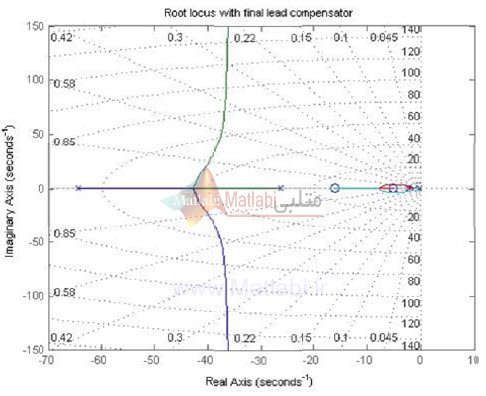
مکان هندسی ریشه ها با اعمال جبرانساز پیش فاز پس فاز نهایی
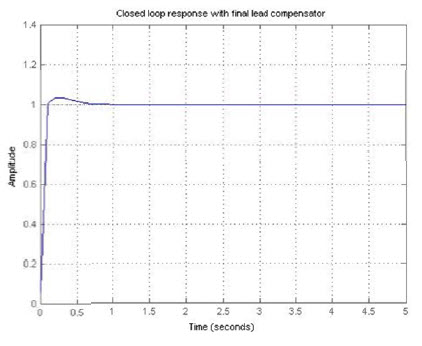
پاسخ حلقه بسته سیستم با اعمال جبرانساز پیش فاز پس فاز نهایی
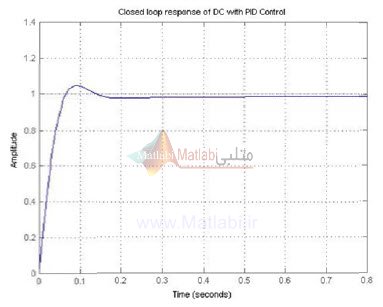
طراحی کنترلر PID
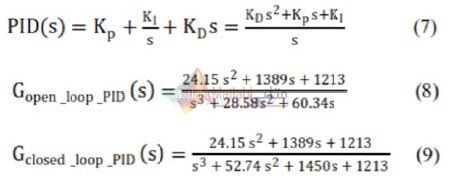
پاسخ حلقه بسته سیستم موتور DC با اعمال کنترلر PID
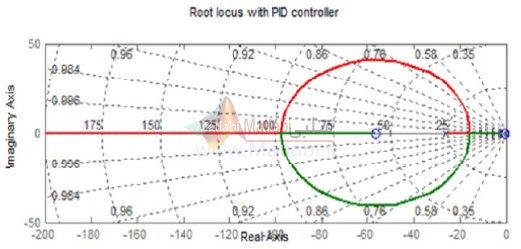
مکان هندسی ریشه ها با اعمال PID
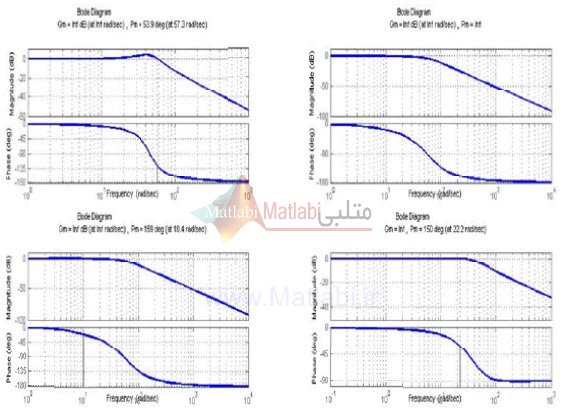
نمودار دیاگرام بود در حالات مختلف
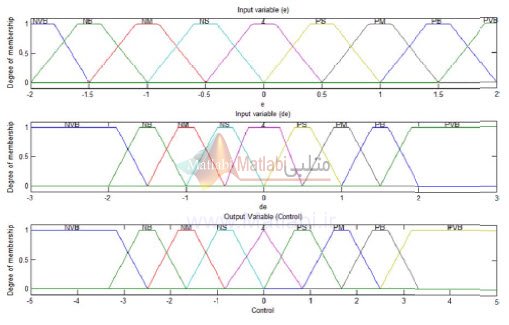
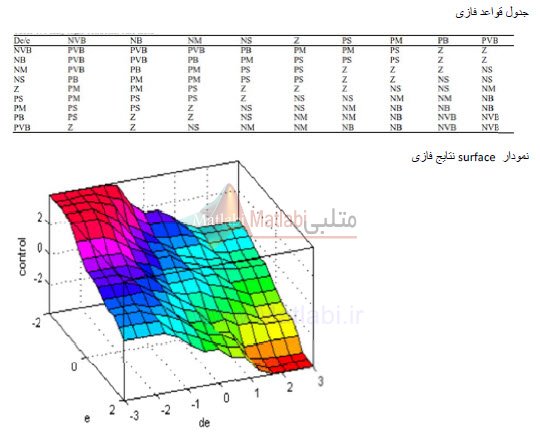
طراحی کنترلر فازی
ورودی و خروجی های فازی
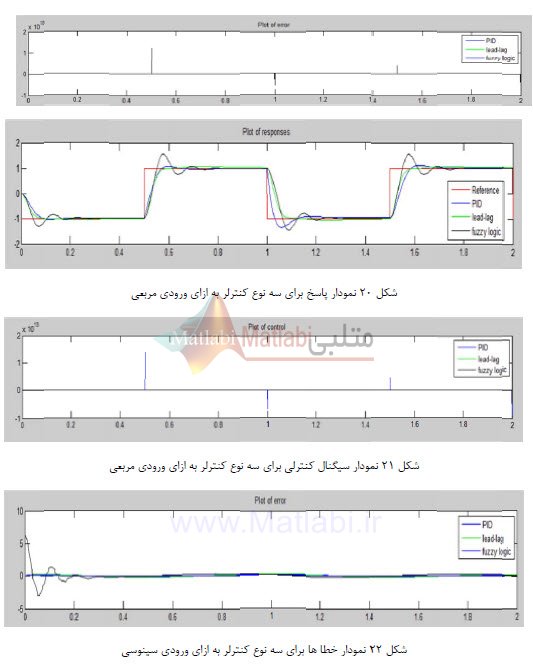
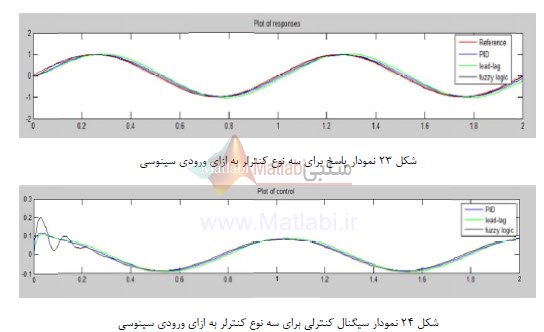
شبیه سازی با متلب و نتایج:
نتیجه گیری:
در اين پژوهش در مورد شبيه سازي و طراحي و آناليز سه كنترل كننده براي كنترل سرعت يك محرك موتور DC كه در يك ربات نقشه بردار استفاده شده است بحث انجام شد. معادله ديفرانسيل خطي بيانگر رفتار سيستم به ازاي ولتاژ ورودي و سرعت خروجي بيان گرديد. از اين تابع تبديل براي اناليز عملكرد سيستم و طراحي كنترلگر مناسب ( فازي-PIDو جبرانساز پس فاز پيش فاز ) استفاده گرديد براي طراحي جبرانساز مكان مطلوب قطب ها از معيار هاي طراحي نظير زمان نشست و بالازدگي پيدا شد. با استفاده از نمودار مكان هندسي ريشه ها مشخص گرديد كه سيستمنياز به يك جبرانساز پيش فاز دارد همچنين يك جبرانساز پس فاز براي تامين شرايط حالت ماندگار سيستم طراحي گرديد. همچنين يك كنترل كننده PID براي سيستم بر اساس روش هاي سنتي طراحي گرديد. به منظور دستيابي ب ه كنترل نرم تر سيستم يك كنترلر فازي ممداني با دو ورودي و يك خروجي و 81 قاعده طراحي گرديد. هر سه كنترل كننده روي سيستم اعمال گرديدند . نتايج نشان دادكه براي تغييرايت سينوسي سرعت ربات كنترلگر فازي عملكرد بهتري از PID هاي صنعتي دارد.
توضیحات بالا بخشی از گزارش کار است.
گزارشکار در قالب پی دی اف است.
کلید واژه: Agricultural mobile robot, DC motor, fuzzy logic, PID, lead-lag compenstor
شبیه سازی مقاله Design and Simulation of Control Systems for a Field Survey Mobile Robot Platform
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.