توضیحات
Parallel structure and tuning of a fuzzy PID controller
ترجمه فارسی موضوع مقاله: ساختار موازی و تنظیم یک کنترل کننده PID فازی
معمولا یک کنترلر فازی براساس خروجی قوانین کنترل فازی ، می تواند از نوع های کنترلر PD یا PI باشد.
ساخت یک کنترلرفازی PID با قوانین فازی سه بعدی ، که براساس error ، آهنگ تغییرات error ، مجموع خطا ها باشد، مشکل می باشد چراکه با توجه به این که پایه کنترلر فازی ، براساس اطلاعات یک نیروی متخصص می باشد که بواسطه در اختیار قراردادن آن اطلاعات در اختیار یک یک کنترلر فازی، به کنترل سیستم می پردازد، اما مشکل این است که درک نیروی متخصص از آهنگ تغییرات خطا سخت بوده ولذا در انتقال اطلاعات به کنترلر فازی با مشکل روبه رو می شود.
قوانین کنترلر فازی می تواند بسیارپیچیده شود زمانی که تعداد کمیت ها ورودی به کنترلر فازی بالا رود که در مقاله حاضر با توجه به مشکل بودن کنترلر فازی از نوع PID ، از ترکیب موازی کنترلر های PI و PD استفاده شده است:
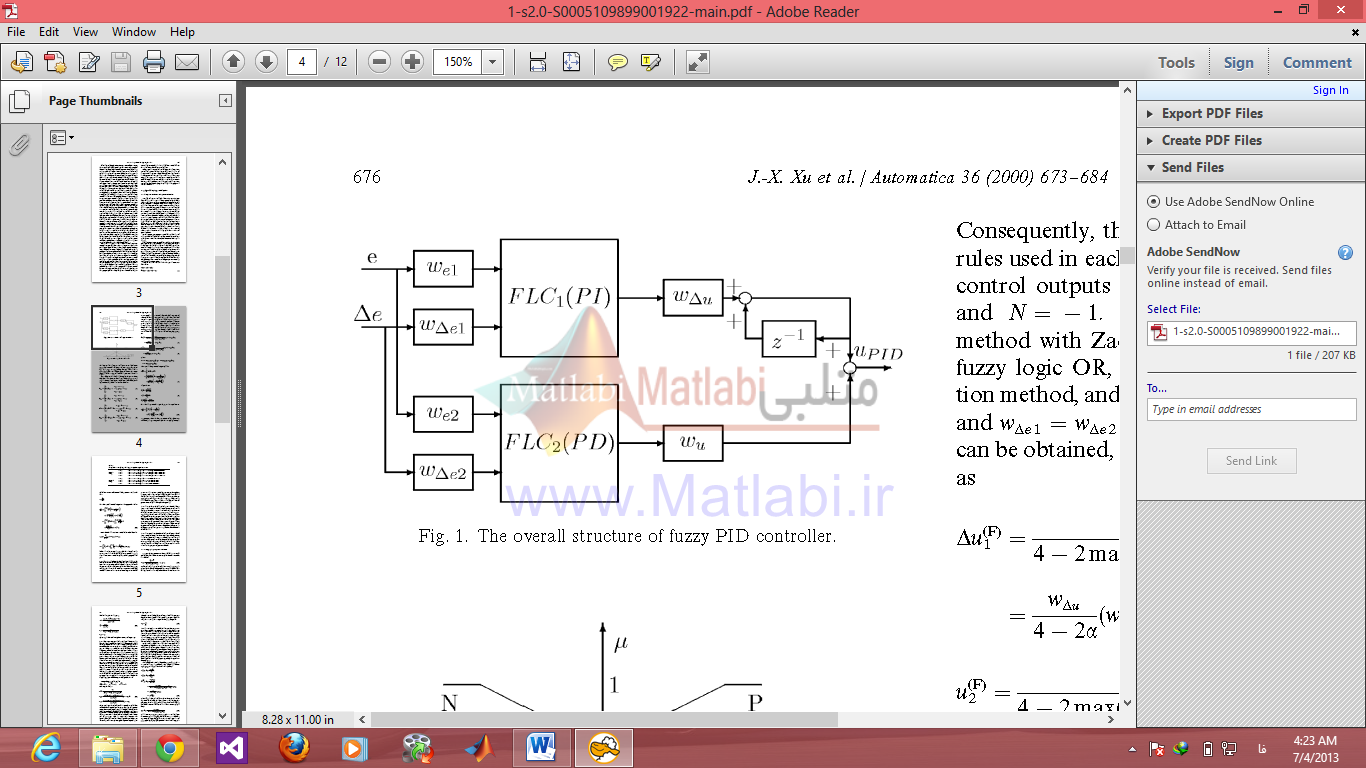
خطا و تغییرات خطا را می توان برای سیستم به صورت زیر تعریف نمود:
با توجه به ایده فوق در ساخت کنترلر فازی خروجی کنترلر فازی(ورودی به plant) را می توان بصورت زیر تخمین زد:
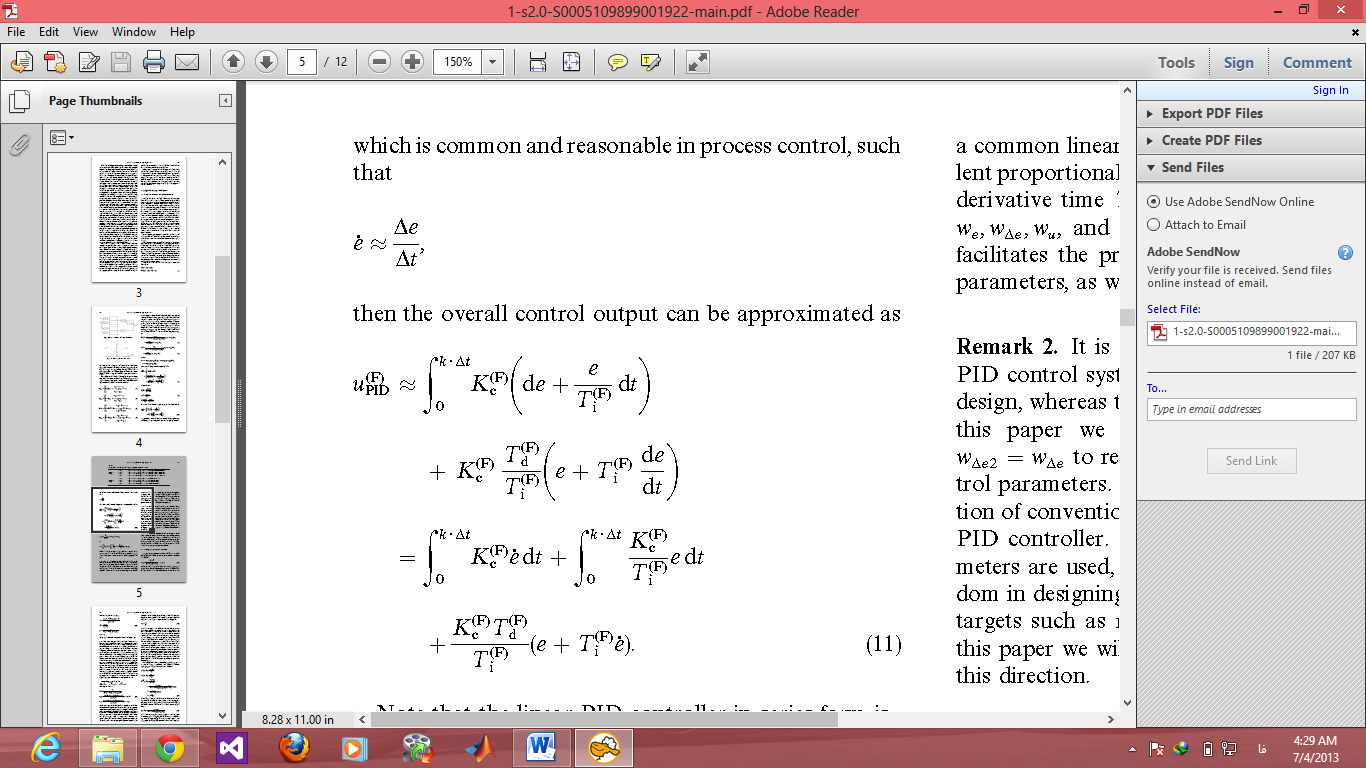
با مقایسه کنترلر فازی فوق با transfer function در حالت عادی ما متوجه می شویم: که کنترلر فازی PID یک کنترلر PID با بهره های غیرخطی می باشد.
- مرحله اول
ایجاد یک کنترلر فازی که براساس تغییرات E و CE پارامترهای بهره PID شامل KP و KI را به ما نشان دهد
برای انجام این عمل دو دیدگاه وجود دارد
1- استفاده از Toolbox فازی
2- استفاده از توابع Fuzzy مطلب جهت تعریف توابع input و خروجی و هم چنین قوانین فازی
پارامترهای در نظرگرفته شده در طراحی کنترلر فازی براساس مقاله:
- استفاده از روش ممدانی
- استفاده از متد AND
- رنج در نظرگرفته شده برای ورودی : [-3 3]
- استفاده از توابع عضویت مثلثی
- رنج در نظرگرفته شده برای خروجی : [-1 1]
- استفاده از توابع عضویت برای خروجی از نوع singleton
- استفاده از روش COG برای defuzzification
نکته: سعی شده است که پارامترهای توابع عضویت برای ورودی و خروجی به گونه ای انتخاب شود که سیستم به صورت متقارن باشند چرا که در این صورت عملکرد سیستم مطلوب تر است:
…
تعریف توابع عضویت برای ورودی خطا:
% Define input E:
FIS = addvar(FIS,’input’,’E’,[-3 3]);
…
تعریف توابع عضویت برای تغییرات خطا:
% Define input CE:
FIS = addvar(FIS,’input’,’CE’,[-3 3]);
…
تعریف توابع عضویت برای خروجی بهره کنترلر KP
% Define output delta_Kp:
FIS = addvar(FIS,’output’,’delta_Kp’,[-1 1]);
…
تعریف توابع عضویت برای خروجی بهره کنترلر Ki
% Define output delta_Ki:
FIS = addvar(FIS,’output’,’delta_Ki’,[-1 1]);
…
مطابق با قوانین ارائه شده در مقاله به طراحی قوانین فازی مربوطه می پردازیم:
اگر m ورودی و n خروجی داشته باشیم، عدد مربوط به m ستون اول مربوط به هر سطر نشان دهنده، index مربوط به آن تابع عضویت ورودی می باشد.
n ستون بعدی مربوط به توابع عضویت خروجی می باشد که عدد مربوط به هر ستون نشان دهنده index متناظر با آن متغییر می باشد.
ستون m+n+1 نشان دهنده تابع وزنی اعمال شده به آن قانون که می بایست عددی بین صفر تا یک باشد. می باشد.
ستون m+n+2 نشان دهنده عدد 1 یا 2 می باشد که 1 نشان دهنده استفاده از اپراتور فازی and و 2 مربوط به اپراتور فازی OR می باشد.
نتایج:
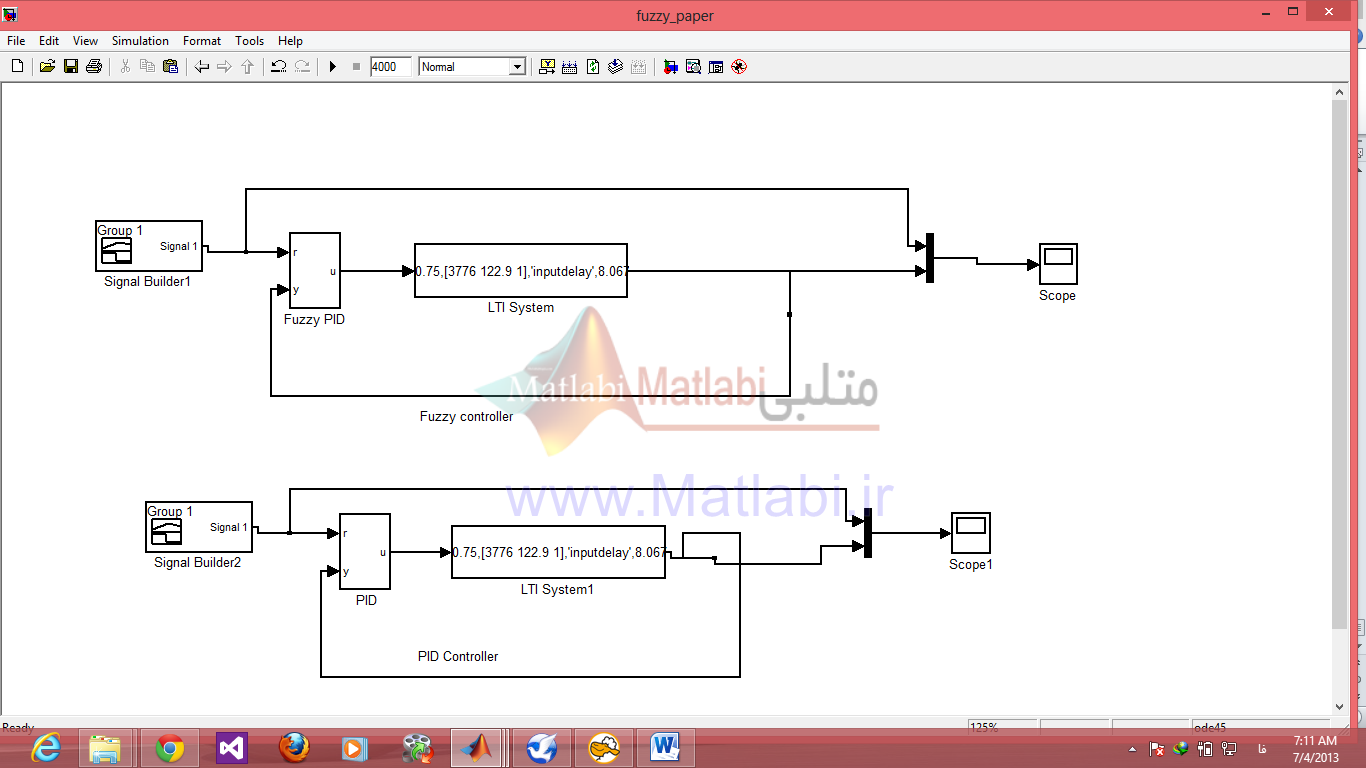
شبیه سازی با متلب :
حال می بایست از سیستم فازی دست آمده جهت کنترلر فازی سیستم مورد مطالعه در مقاله استفاده نماییم بنابراین سیستم parallel مسئله را بصورت زیر شبیه سازی می نماییم:
…
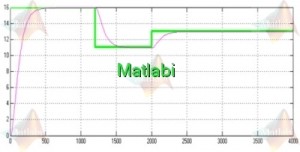
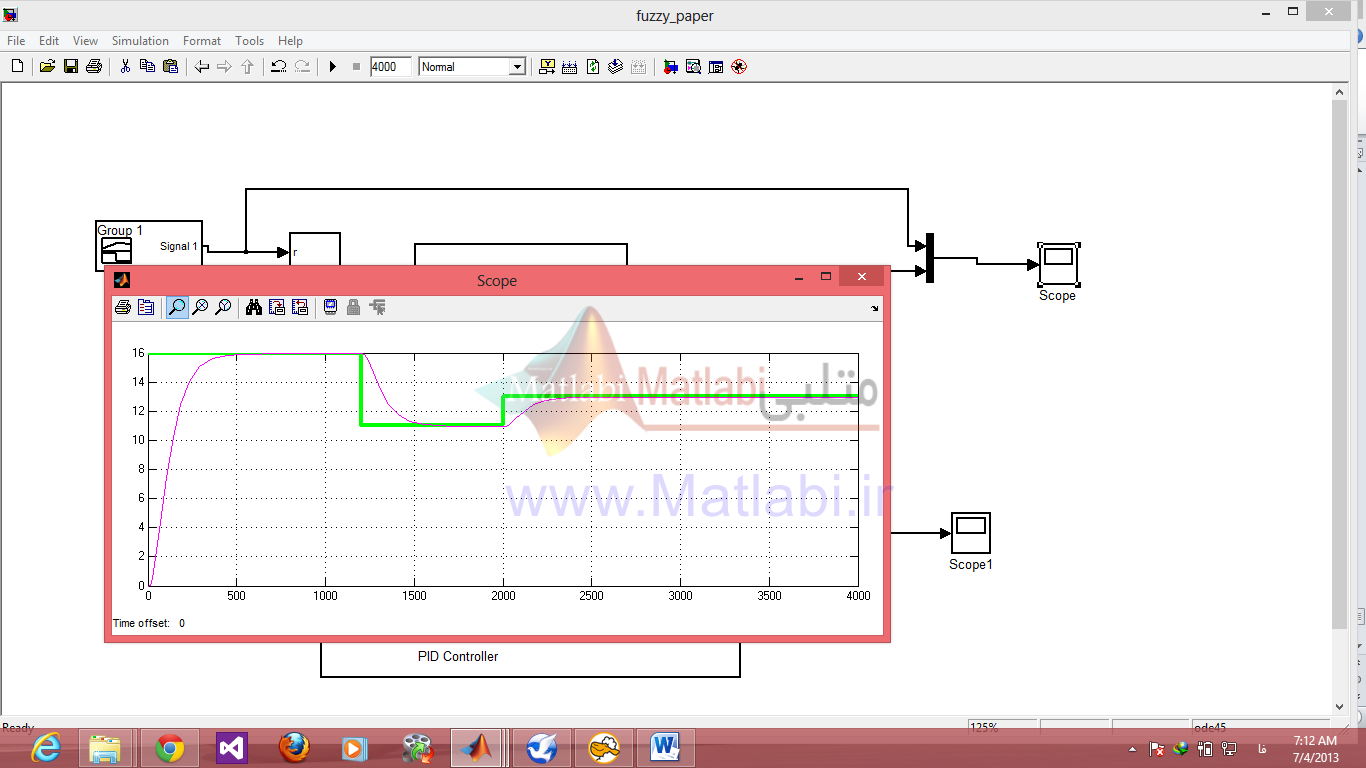
با شبیه سازی سیگنال مطلوب مورد استفاده به عنوان desired input می بینیم که سیستم فازی به خوبی آن را ترک نموده است:
…
پاسخ با کنترلر فازی:
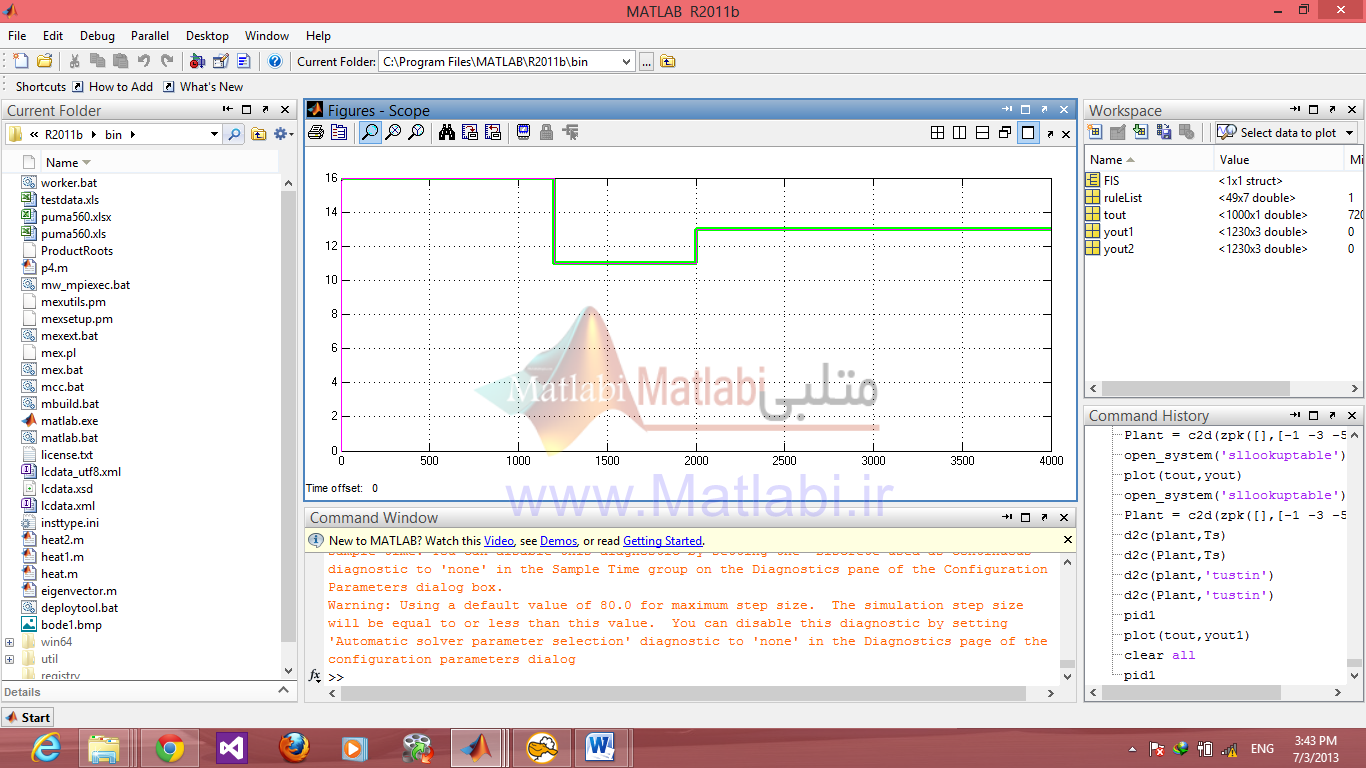
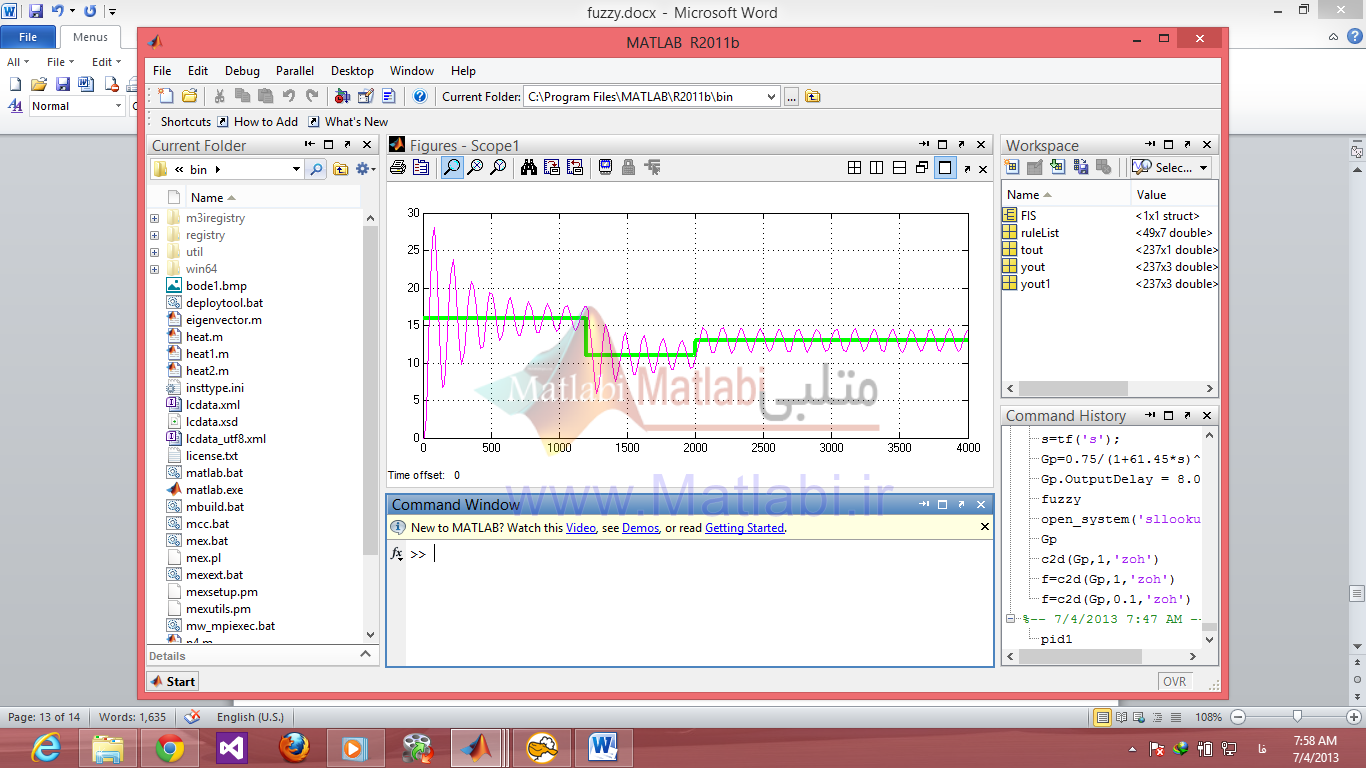
پاسخ PID :
این در حالی است که در سیستم PID در هنگامیکه ورودی مطلوب به طور ناگهانی تغغیر می نماید به خوبی نمی تواند ورودی مطلوب را track نماید، چرا که همانطور که قبلا عرض شد در سیستم PID بهره های کنترلر همواره مقداری ثابت می باشد این در حالی است که در کنترلر فازی یک PID با بهره های متغیر است.
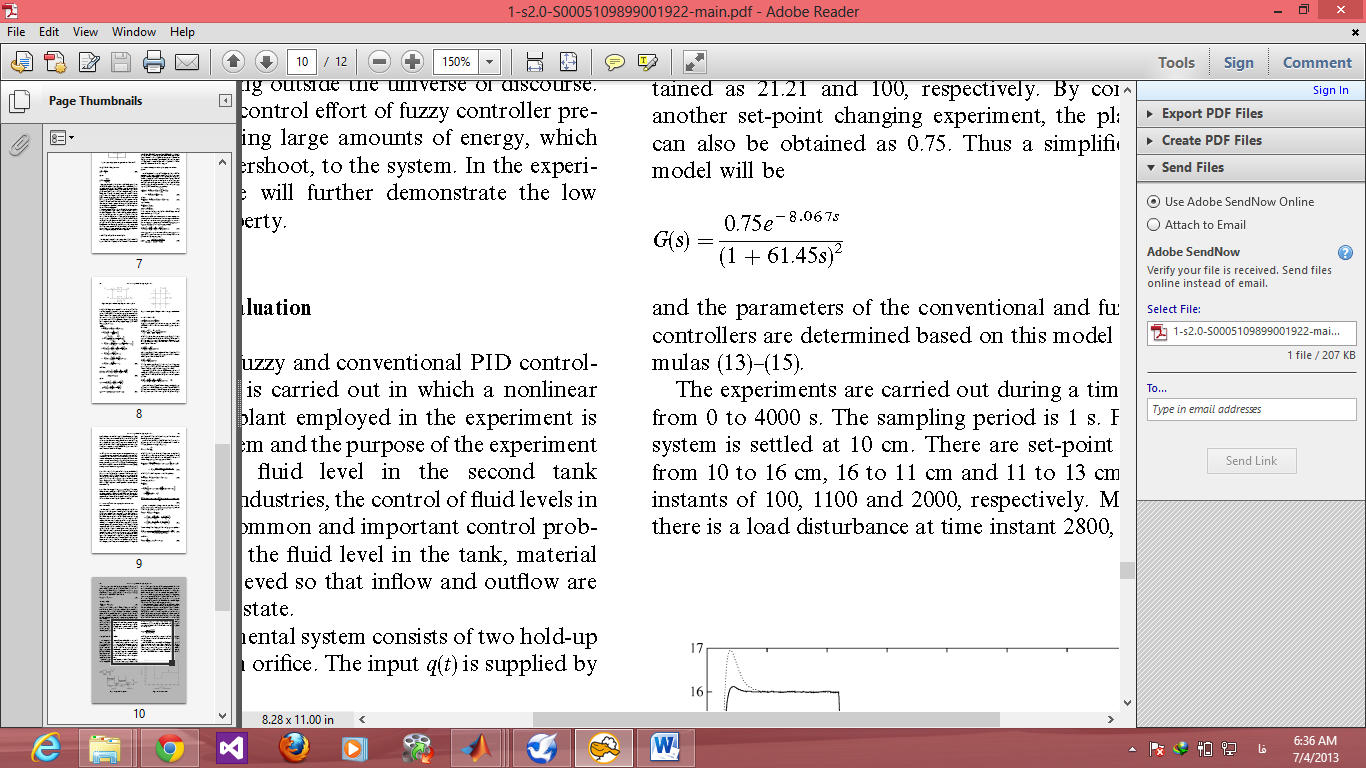
اما حالا برای سیستم نشان داده شده در مقاله به بررسی اثر دو کنترل کننده می پردازیم:
…
یعنی برای سیستم:
پاسخ openloop :
…
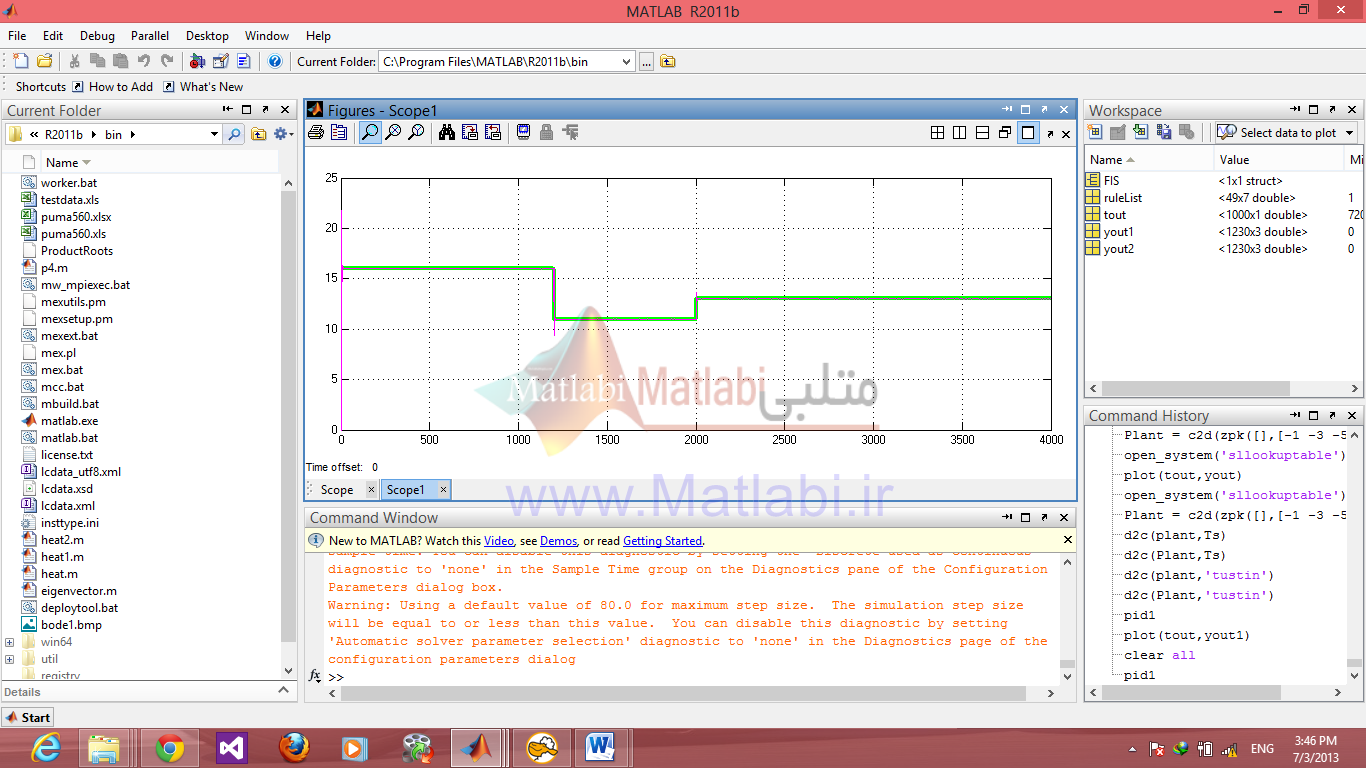
پاسخ فازی:
پاسخ فازی:
پاسخ PID :
برای این سیستم، به طور کلی سیستم PID نتوانست ورودی راtrack نماید چرا که همانطور که قبلا عرض شد در سیستم PID بهره های کنترلر همواره مقداری ثابت می باشد این در حالی است که در کنترلر فازی یک PID با بهره های متغیر است. توانست ورودی را به طور مناسب track نماید.
قوانین فازی، کنترل
Fuzzy PID control, PID tuning, Gain and phase margins, BIBO stability
شبیه سازی مقاله Parallel structure and tuning of a fuzzy PID controller
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.