توضیحات
Sliding mode control design under partial state feedback for ball and beam system
ترجمه فارسی موضوع مقاله: طراحی کنترل مود لغزشی تحت فیدبک حالت جزیی برای سیستم توپ و میله
در اين گزارش، طراحي يك كنترلر مُد لغزشي (Sliding Mode) براي سيستم Ball And Beam ارائه شده است.
ابتدا تئوريهاي مربوط به اين روش كنترلي بيان شده و در ادامه با استفاده از بخش سيمولينك نرمافزار MATLAB، كنترلر مُد لغزشي براي سيستم مذكور طراحي و شبيهسازي گرديده است.
با توجه به اين واقعيت كه وجود عدم قطعيت (Uncertainty) در سيستمها امري اجتنابناپذير است، لذا گرايش به سمت طراحي كنترلكنندههاي مقاوم (Robust) در برابر عدم قطعيتها مسئلهاي ضروري به نظر ميرسد.
اصولا منابع عدم قطعيت را ميتوان به دو دسته تقسيم كرد:
- عدم قطعيت ساختار يافته (Structured) يا پارامتريك (Parametric).
- عدم قطعيت ساختار نيافته (Unstructured) كه شامل غيرخطي بودن (Nonlinearity) و ديناميكهاي مدل نشده (Unmodeled Dynamics) ميشود.
با توجه به اينكه وجود عدم قطعيت در مدل كردن سيستمهاي غيرخطي ميتواند اثرات شديدي در كنترل اينگونه سيستمها به جا بگذارد، لذا استفاده از كنترل مُد لغزشي، كه يك روش مقاوم است، ميتواند با اين مشكل مقابله كند. نوعا ساختار يك كنترلكننده مقاوم از دو بخش زير تشكيل ميشود:
- بخش عادي؛ مانند خطيسازي فيدبك يا قانون كنترل معكوس.
- بخش افزوده؛ كه با عدم قطعيتهاي موجود در مُدل سروكار دارد.
معرفي روش مُد لغزشي (Sliding Mode)
ايده اصلي روش كنترلي مُد لغزشي از اينجا نشأت ميگيرد كه كنترل يك سيستم غيرخطي درجه 1 با وجود عدم قطعيت، سادهتر از كنترل يك سيستم غيرخطي درجه n است.
در حقيقت مسئله درجه n را با مسئله معادل يك سيستم درجه 1 جايگزين ميكنيم.
كنترل مُد لغزشي يك روش سيستماتيك براي مسئله پايداري و عملكرد مناسب در مواجهه با وجود عدم دقت در مدل ارائه ميكند.
با برقراري امكان مصالحه بين مدل كردن و عملكرد مطلوب، ميتوان ديد شفافي از فرآيند طراحي به دست آورد.
اين روش بهطور موفقيت آميزي در سيستمهايي مثل بازوي رباتها، وسايل نقليه زيرآبي، موتورها و محركههاي خودرويي، موتورهاي الكتريكي با قابليت عملكرد بالا و سيستمهاي قدرت بهكار گرفته شده است.
…
پيادهسازي و شبيهسازي سيستم در سيمولينك
شماي كلي برنامه سيمولينك در شكل زير آمده است:
…
شكل (4) سيستم ربات شبيهسازي شده با سيمولينك
در شكلهاي زير زيرسيستمهاي مربوطه نيز آمده است:
…
شكل (5) زيرسيستم مدل ربات
…
شكل (6) زيرسيستم مدل مرجع
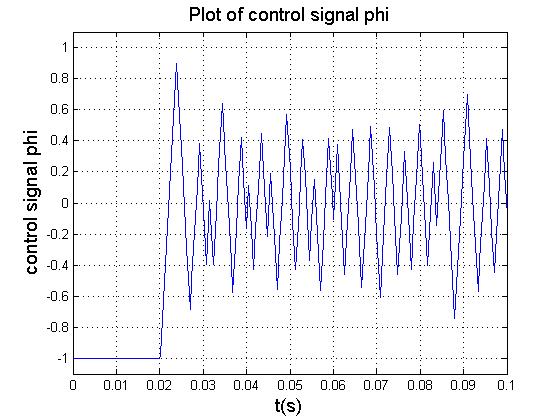
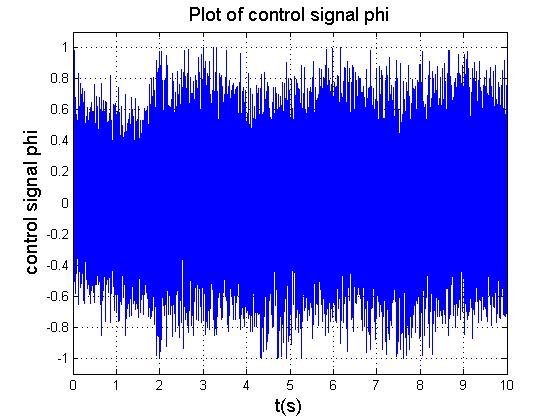
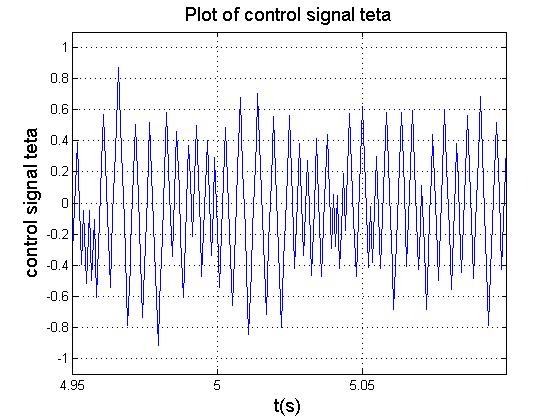
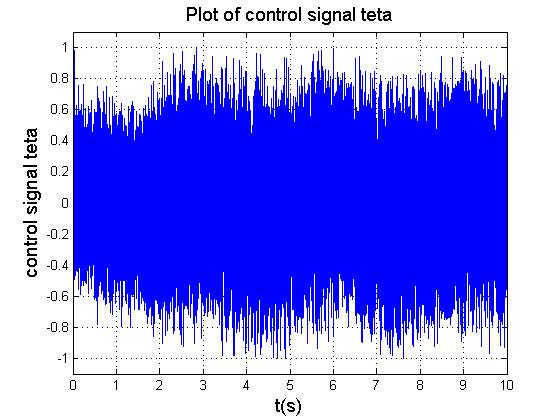
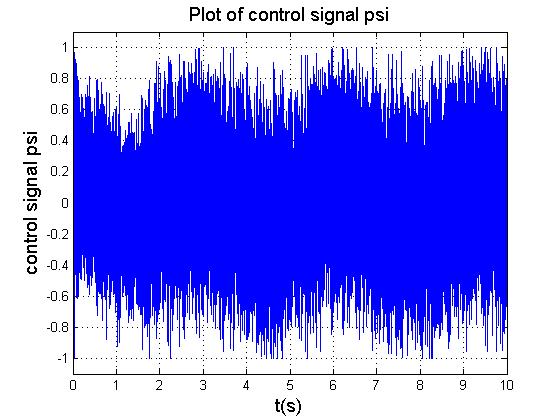
با اعمال ورودي پله با دامنه 1 به هر سه ورودي، نمودارهاي مربوط به زواياي خروجي، گشتاورهاي اعمالي به jointهاي ربات و نيز خطاهاي تطابق مربوط به سه link در ادامه آمده است:
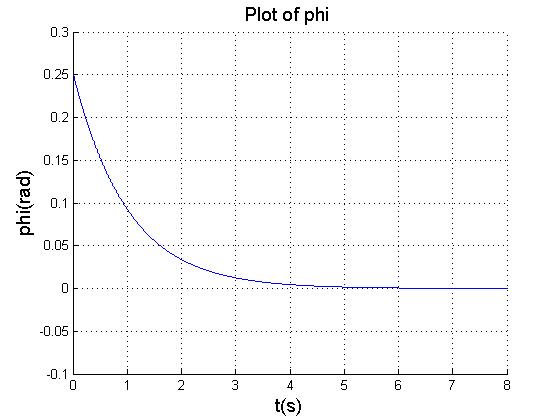
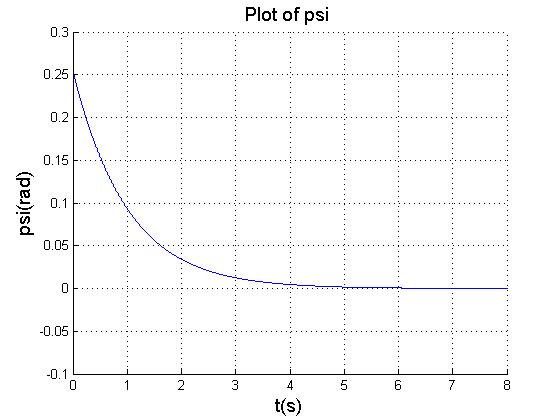
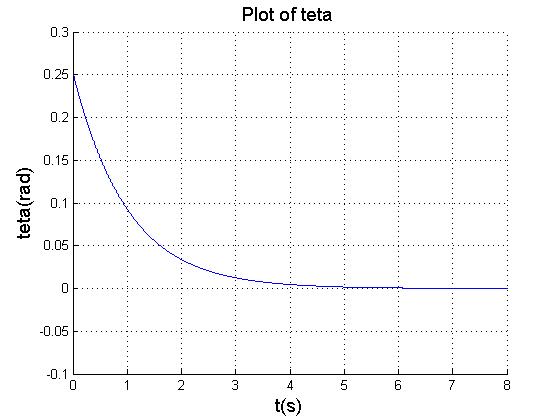
شكل (7) نمودار زواياي 1، 2 و 3
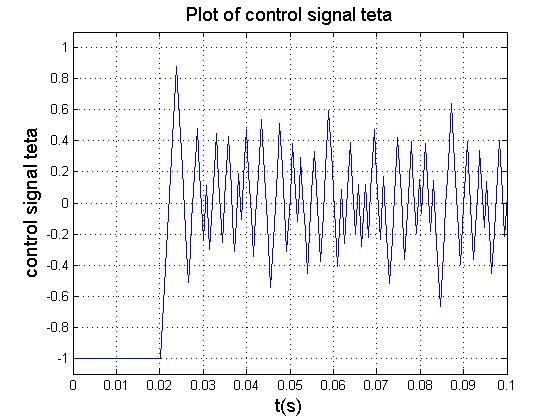


شكل (8) نمودار گشتاورهاي 1، 2 و 3
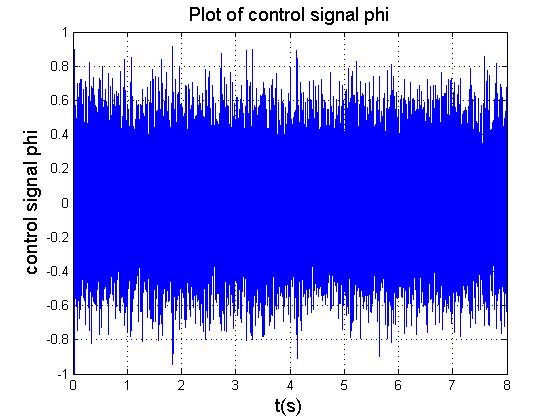
با اعمال ورودي سينوسي با دامنههاي مختلف 1، 2 و 3 و فركانس Hz 1 به سه ورودي، نمودارهاي مربوط به زواياي خروجي، گشتاورهاي اعمالي به jointهاي ربات و نيز خطاهاي تطابق مربوط به سه link در ادامه آمده است:
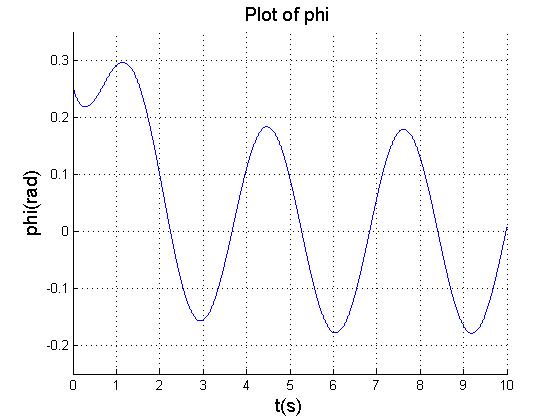
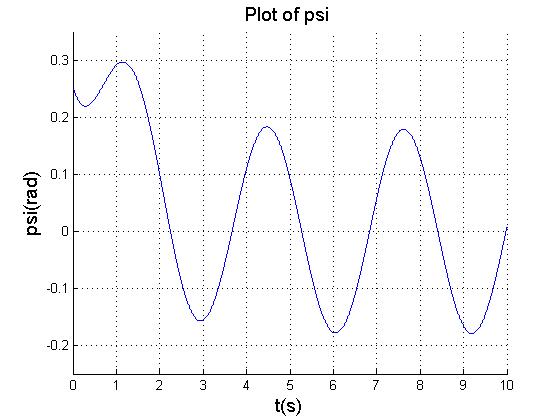
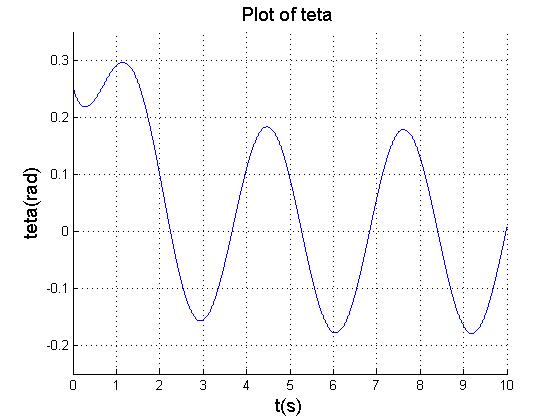
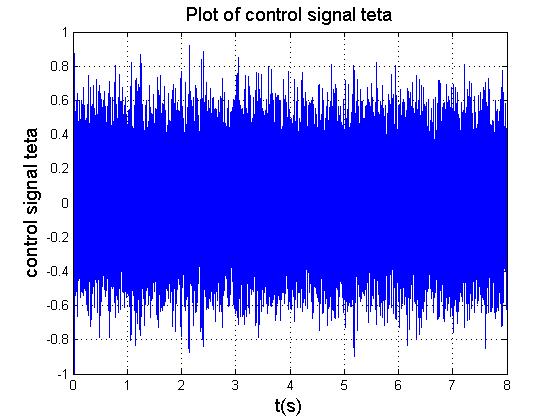
شكل (9) نمودار زواياي 1، 2 و 3
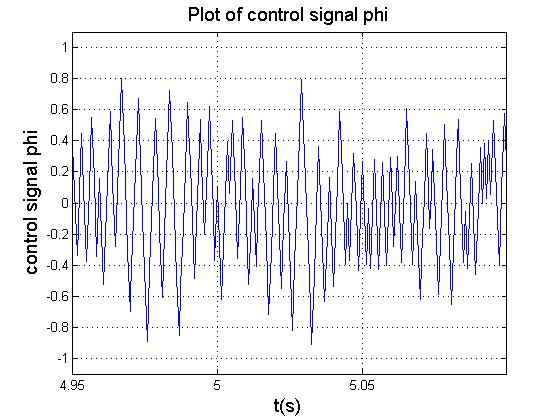

شكل (10) نمودار گشتاورهاي 1، 2 و 3
با مشاهده نمودارهاي مربوطه مشخص ميشود، همانطوركه در مقدمه نيز اشاره شد، روش كنترل تطبيقي يكي از روشهاي خوب و موفق در زمينه كنترل رباتيك ميباشد.
بديهي است كه سيستم قابل تنظيم ما توانسته به خوبي ماموريت خود را انجام داده و رفتار سيستم ربات را به رفتار مدل مرجع نزديك كند.
در ضمن مشاهده ميشود كه پاسخ سيستم به ورودي سينوسي به مراتب بهتر از ورودي پله ميباشد.
در اینجا فقط بخشی از گزارش آمده است. جهت تهیه شبیه سازی با متلب و گزارش کامل آن باید این محصول خریداری شود.
کلید واژه : کنترل مقاوم, خطی سازی, غیر خطی, فیدبک, مد لغزشی, گوی و میله
Partial state feedback, Sliding mode control, Ball and beam system
شبیه سازی مقاله Sliding mode control design under partial state feedback for ball and beam system
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.