توضیحات
A Novel MPPT Control Design for Wind-Turbine Generation Systems Using Neural Network Compensator
ترجمه فارسی موضوع مقاله: طرح کنترلی جدید MPPT برای سیستم توربین بادی با استفاده از جبرانگر عصبی
این شبیه سازی فقط با متلب 2014 قابل اجراست.
چکیده:
این مقاله یک الگوریتم نوین برای دنبال کردن نقطه بیشینه توان (MPPT) در سیستم تولید توربین بادی با استفاده از یک شبکه عصبی جبرانگر بر اساس شیب توان مکانیکی توربین بادی بر حسب سرعت چرخشی جهت اجتناب از مسئله نوسانات و اثر پارامترهای نامعین ارائه می نماید.
از آنجایی که مشخصه سرعت چرخشی توربین بادی به وسیله سرعت باد و چگالی هوا تعیین می شود، تکنولوژی تغییر محل نقطه ماکزیمم توان باید در اعمال کنترل MPPT لحاظ گردد تا ژنراتور توربین بادی بازده بهینه را از انرژی باد در شرایط کاری مختلف دریافت نماید.
در این کار، نامعینی های سیستمهای توربین بادی به وسیله یک شبکه عصبی جبران می گردد و duty cyle مبدل dc/dc با یک کنترل کننده PI که پارامترهای آن توسط الگوریتم ژنتیک بدست می آید، تعیین می شود.
از روی نتایج حاصل از شبیه سازی، اعتبار کنترل کننده MPPT پیشنهاد شده را می توان تحت تغییرات سرعت باد، چگالی هوا و مشخصه الکتریکی بار در توربین بادی تأیید نمود .
شرح پیاده سازی:
در ابتدا با استفاده از داده ها و روابط اشاره شده در مقاله داده های لازم برای train نمودن یک شبکه عصبی Layer recurrent را تولید می نماییم (کد Data.m) سپس با استفاده از جعبه ابزار شبکه عصبی MATLAB عملیات تعریف و آموزش شبکه عصبی مذکور را ترتیب می دهیم و سپس با دستور gensim شبکه را در محیط simulink ظاهر می سازیم.
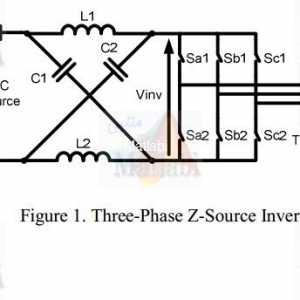
سپس مدار شکل 4 را در محیط سیمولینک پیاده می نماییم (فایل SIM.mdl)
برای تعیین مقادیر Kp و Ki در کنترل کننده PI از الگوریتم ژنتیک کمک می گیریم. تابع هدف مورد نظر به قرار زیر است:…
تابع مذکور در gaexcost.m پیاده شده است. مقدار t0 برابر 04/0 در نظر گرفته شده است. برای بهینه سازی آن از تابع degademo که بر اساس الگوریتم ژنیتک نقاط ماکزیمم تابع هدف را در یک دامنه داده شده مییابد، به صورت زیر استفاده می نماییم:
Degademo(@gaexcost,50,50,[1e-7 10;1e-7 10]);
در دستور فوق،آرگومان اول آن تابع هدف، آرگومان دوم تعداد نسلها، آرگومان سوم تعداد جمعیت و آرگومان آخر دامنه بهینه سازی برای Kp و Ki می باشد که سطح [10-7 10]×[10-7 10]در نظر گرفته شده است.
بعد از اجرای دستور، 50 دسته جواب برای مسأله به دست خواهد آمد. البته برای جلوگیری از طولانی شدن زمان اجرای دستور می توان تعداد جمعیت را کمتر در نظر گرفت.
مقاله بعد از بدست آوردن دسته جوابها از بین آنها مقادیر زیر را برای کنترل کننده PI مورد استفاده قرار داده است:
Kp = 0.0957;
Ki = 0.0304;
قبل از اجرای SIM.mdl ، مقادیر فوق را در workspace قرار می دهیم. سپس فایل مذکور را اجرا می کنیم. نتایج حاصل برای دو دسته ورودی به صورت شکلهای زیر خواهد بود:
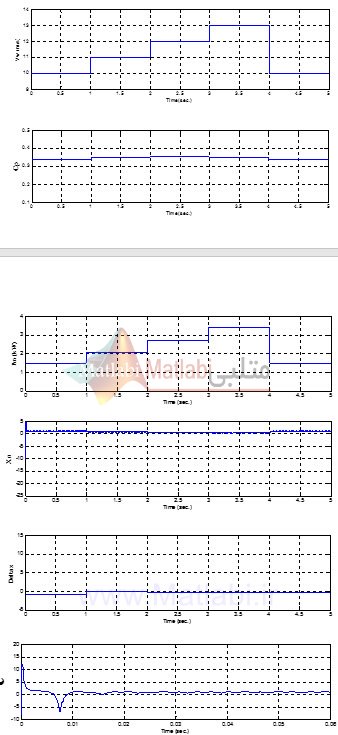
الف)تغییر ناگهانی سرعت باد:
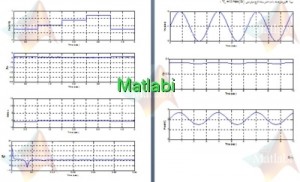
ب) تغییر سرعت باد به صورت تابع سینوسی :

دارای فیلم از نحوه اجرای برنامه با متلب است.
- انجام پروژه شبکه عصبی با متلبی
برچسب:
Robotic system, Computed torque, control, Neural network, Variable structure control, H∞ control, Lyapunov stability
شبیه سازی مقاله A Novel MPPT Control Design for Wind-Turbine Generation Systems Using Neural Network Compensator
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.