توضیحات
Neural network based robust hybrid control for robotic system an H∞ approach
ترجمه فارسی موضوع مقاله: شبکه عصبی مبتنی بر کنترل هیبرید برای رویکرد H بی نهایت سیستم رباتیک
چکیده
سیستم ترکیبی پیشنهادی در این مقاله سیستم کنترل محاسبه گر گشتاور یا CTC با شکه عصبی و سیستم متغیر H-infinity غیر خطی می باشد.
فرض بر این است که سیستم کنترل ربات کاملا مشخص است و با روش CTC قصد اعمال کنتل مناسب را داریم.
در اين پايان نامه روش کنترل مقاوم H-Infinity استاندارد که روشي بسيار موثر مي باشد مبتنی بر شبکه های عصبی به کار گرفته می شود.
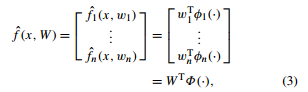
بنابراین فضای فرضیهH در یادگیری پرسپترون عبارت است ازمجموعه تمام مقادیر حقیقی ممکن برای بردارهای کنترلی سیستم مرد نظر که در رابطه شماره 3 آمده است.
اعمال کنترل مقاوم طبق رابطه 12 در مقاله بر سیستم وارد می شود:
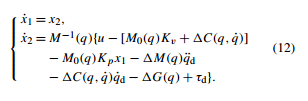
پس از تعریف شرایط اولیه مطابق با مقاله و ماتریس ها برای تضمین پایداری سیستم با استفاده از قضیه لیاپانف و تغییر متغیرهای اعمال شده در این مقاله و استفاده از دو مقاله دیگر در رفرنس ، تابع کنترل که ترکیبی از چند کنترل متفاوت بود با استفاده از حلقه های تکراری متلب نوشته شد.
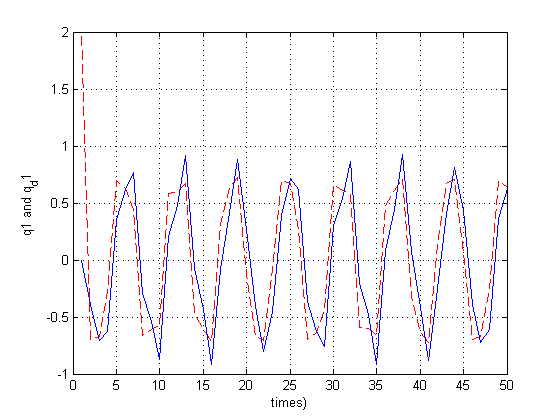
برای اجرای کد متلب پس از باز کردن کد و اجرای آن (زدن دکمه سبز تولبار) برنامه اجرا شده و ردیابی سیستم را با کنترلر ارائه شده ترسیم مینماید.
نتیجه اجرای برنامه:
B0 =
0 0
0 0
1 0
0 1
p =
12.7806 -12.3229 0.0124 -0.0874
-12.3229 12.7806 -0.0874 0.0124
0.0124 -0.0874 0.1495 -0.0508
-0.0874 0.0124 -0.0508 0.1495
Proj =
0.0017
deltay =
1.0e+04 *
0.3983 -0.8933
-1.8645 0.5216
…
deltay =
1.0e+21 *
-1.0753 -0.0000
0.4785 0.0000
deltay =
1.0e+21 *
-1.7764 -0.0000
0.7820 0.0000
>>
- انجام پروژه شبکه عصبی با متلبی
نمودارهای نهایی:
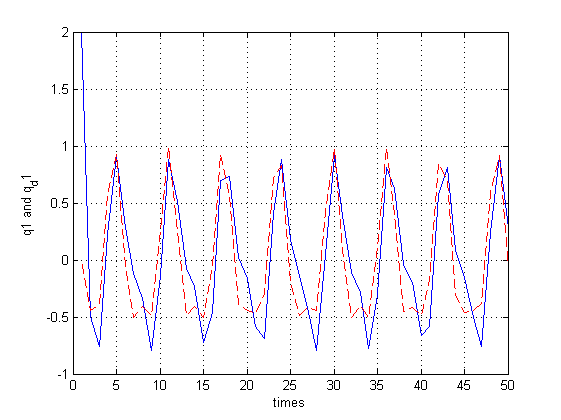
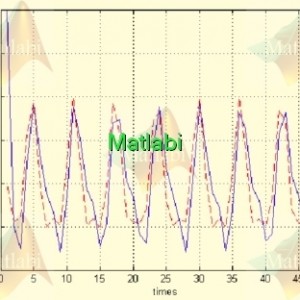
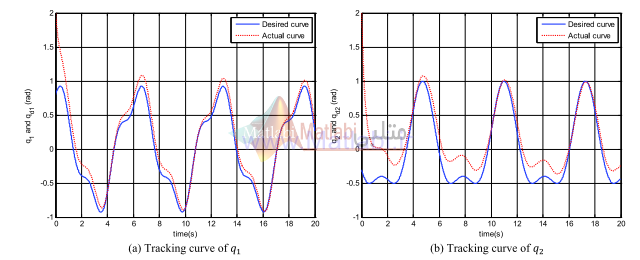
و نمودار های اصل مقاله:
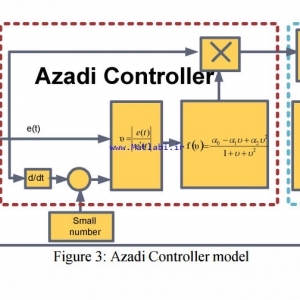
يك ساختار كنترلي كلي براي رديابي کنترل ارائه ميشود اين ساختار كنترلي بر مبناي تقريب توابع غيرخطي نامعلوم بوده و مي تواند براي استخراج خانواده وسيعي از كنترل كننده ها شامل كنترل كننده هاي مقاوم، تطبيقي و هوشمند به كار برده شود.
با استفاده از اين ساختار يك كنترل كننده عصبي با روش آموزش مركب استخراج شده است.
سيستم هاي کنترلي عصبي که مورد بحث اين مقاله مي باشند، پتانسيل بسيار بالايي براي بوجود آوردن زمينه کاري براي سیستم های کنترلی مقاوم دارند.
اعمال روش ترکیبی شبکه عصبی در کار حاضر موجب بهبود کارایی H-infinity غیر خطی می گردد و سیستم VSC و h-inf تضمین مقاوم بودن کنترل در مقابل اغتشاشات را می نماید.
شبيه سازي انجام شده درنرم افزار MATLAB درستي كنترل كننده ارائه شده را تاييد ميكند.
برچسب ها:
قضیه لیاپانف
Robotic system, Computed torque, control, Neural network, Variable structure control, H∞ control, Lyapunov stability
شبیه سازی مقاله Neural network based robust hybrid control for robotic system an H∞ approach
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.